基于Tensorflow的垃圾分类回收系统设计
2021-09-24邓银莹徐勇
邓银莹 徐勇
摘要:目前我国城市垃圾数量逐年增加,垃圾分类及回收成为亟待解决的问题。针对城市生活垃圾分类效率低的现状,以Tensorflow为基础设计基于图像识别的垃圾分类回收系统,系统由图像识别分类、机械控制、用户使用、满溢监测、清理系统五个模块组成,旨在以智能化无人操作的方式完成垃圾的前期分类及回收,节省大量人力和物力投入,为我国智能垃圾分类回收箱的构建提供新思路。
关键词:人工智能;垃圾分类;图像识别;Tensorflow
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2021)23-0050-03
1引言
1.1 生活垃圾处理现状
随着人民经济生活水平的提高,城市垃圾总量日益增长。因大多数居民对于垃圾分类了解过少,在投放时无法正确进行垃圾分类处理,仅简单将各类垃圾放置在一起,使部门回收时无法及时合理化处理垃圾,导致严重的环境污染。
目前我国大多数城市采用填埋法处理垃圾,且对于垃圾的回收采取混合回收和统一运输的方式,这不仅浪费土地资源,且依赖人工分拣,处理过程复杂,推广效果不佳。
1.2 垃圾分类行业发展现状
几年来我国加速推行垃圾分类制度,先后在46个重点城市基本建成生活垃圾分类处理系统,同时加快构建生活垃圾分类投放、收集、运输、处理为一体的处理体系,旨在进一步推动循环经济、再生资源行业、环卫设施产业发展。
由于人为处理垃圾分类过程较为复杂,公民分类意识和习惯仍需培养,因此使垃圾分类智能化成为现今垃圾分类行业需研究的重要方向。同时由于云计算、大数据、物联网技术的出现,使垃圾分类智能化成为现实。
1.3 分类系统介绍
为了更好解决垃圾分类回收问题,及为垃圾分类智能化研究提供新思路。本文设计基于Tensorflow的生活垃圾分类回收处理系统,克服人工分拣困难,既提高前期的垃圾分类效率,又能回收更多可循环利用资源,在保护环境的同时减少资源消耗,降低后期垃圾处理的技术难度。
2 回收箱功能设计
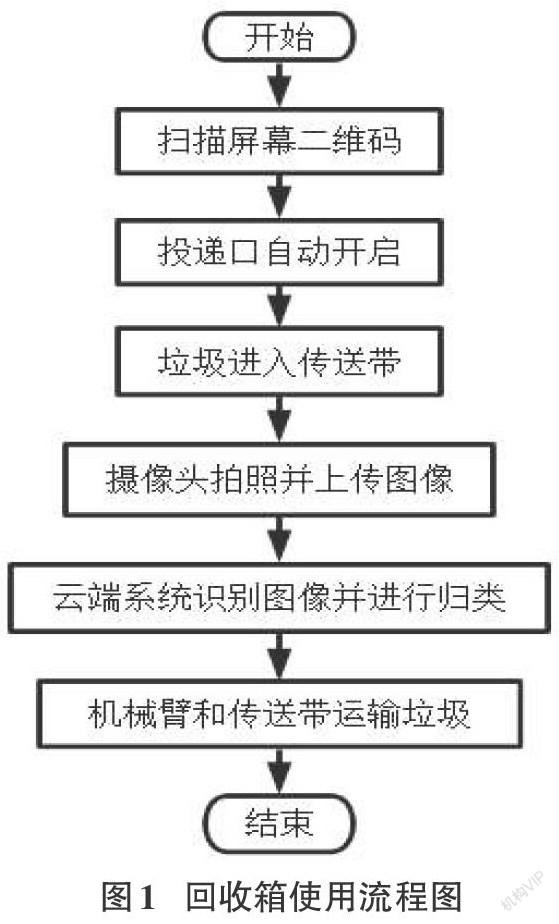
本系统以TensorFlow为“监察者”,以单片机为“执行者”,通过两者的协同配合来更加精确地实现垃圾分类回收[1]。箱体基于全封闭式设计,共分为五个模块,图1为回收箱使用流程图。
2.1 图像识别分类模块
该模块为整个系统设计重点之一。回收箱内部能通过摄像头捕捉投入箱内的垃圾图像信息,并将图片进行处理后发送到后台系统。后台系统接收垃圾图像后,利用训练好的神经网络模型对图像进行处理、识别与分类。
2.2 机械控制模块
回收箱机械控制包括箱内机械臂、传送带、摄像头、红外传感器等硬件设施。主要负责在系统识别出用户投入垃圾的类别后,利用机械臂和传送带将垃圾送至相应内置垃圾桶中。同时,后台系统控制回收箱內部装置进行定时消毒灭菌与排气处理。
2.3 用户使用模块
回收箱上安装液晶显示屏,用户通过扫描二维码登录线上个人账户,从而实现开关回收箱投递口、查看个人使用记录、进行积分兑换等操作。
2.4 满溢监测模块
每个内置垃圾桶顶部安装红外感应装置,能实时检测桶内垃圾容量。一旦垃圾达到箱体容积的80%,系统便会发出警报,同时将信息传入云端检测部门,系统根据警报安排工作人员进行垃圾回收运输与后续处理。
2.5 清理系统模块
桶内安装紫光灯消毒装置,定期对箱内垃圾进行消毒杀菌处理,防止细菌滋生。箱底安装排气装置,从而保持箱内空气清新流畅。
2.6 设施监控模块
回收箱内装有GPS定位系统,不仅能实时检测回收箱地理位置,更设有防盗安全警报装置,当检测到回收箱某部位出现异常状况,例如箱体遭到破坏等,系统便会发出警报,同时定位该回收箱位置,利用监控查看周围情况,避免回收箱被不法分子盗走。
3 基于Tensorflow的图像分类设计
Tensorflow是谷歌基于DistBelief研发的第二代人工智能学习系统,可用于语音识别、图像识别、大数据预测等机器学习和深度学习领域。利用神经网络进行回收系统设计,能迅速、有效、准确地对垃圾图片进行识别与分类,提高回收箱智能分类水平[2]。下面是神经网络模型设计:
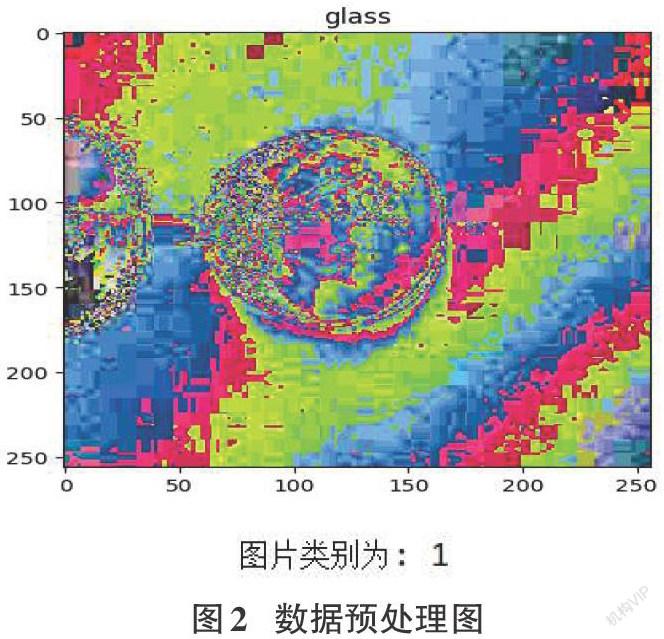
3.1 数据预处理
利用爬虫或是上网查找公开数据集等方式获取各类图片,包括塑料、易拉罐、废纸、玻璃、布料等。对图像进行旋转、裁剪、缩放、设置灰度等操作,并设置标签,不同标签代表不同图像对应类别,可视化查看预处理效果。最后需要将训练集数据转化为TFRecord格式文件,作为神经网络的输入层进行训练。
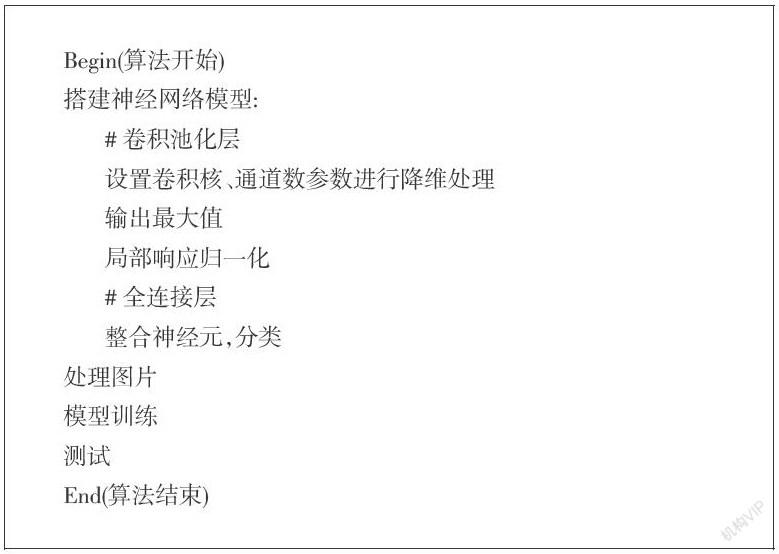
3.2 搭建神经网络模型
通过构建卷积神经网络框架进行图片分类训练。本文共设置三次卷积池化层,两次全连接层,一次RELU层和一次softmax层进行训练。训练步骤包括:1)提取训练数据集送至搭建好的模型;2)利用模型将图像和类别标签相对应并验证结果;3)在训练中统计每迭代1000次的检验损失值loss和准确率acc,当损失值越小,准确率越高时,模型向正确方向收敛。
图3是模型训练完成后可视化得到的loss-acc曲线图,其中蓝色线代表随训练次数增加,损失值逐渐降低。红色线代表模型准确率随训练次数的增加而上升。从图中可以看出,随着训练次数增加,该模型训练效果逐渐增强,符合分类回收系统构建需求。
3.3 实例验证
最后,利用测试集对训练好的模型进行检验。测试集包含的图片数据不是训练集的一部分,需要找新的数据进行结果验证。
图4展示部分测试结果,表1为针对上述训练模型的测试结果汇总。从表中数据可以看出,测试集分类准确率不高,应考虑训练模型不够完善、训练集数据较少等问题加以改进,从而使垃圾分类模型更加准确有效。
