飞跨电容三电平变换器开关器件故障检测技术
2021-09-24康文妮谭阳红司羽飞赵枫帆
康文妮,谭阳红,司羽飞,赵枫帆,李 杰
(湖南大学电气与信息工程学院,长沙 410082)
通常,功率开关器件是系统中最易损坏的组件之一[2],大约42%的系统故障可归因于功率开关器件故障[3]。提高变换器可靠性的自然方法是使用高度可靠的功率开关器件。然而,硅和宽禁带半导体器件的可靠性和耐用性问题仍未完全解决[4]。飞跨电容器多电平变换器具有冗余特性[5],即一个或多个功率开关器件出现故障,变换器仍可以运行(尽管功率水平或性能降低)。因此,要求在能够进入容错模式之前迅速检测并识别出开关器件的故障。
现在越来越多的研究点集中在飞跨电容多电平DC-DC 变换器的故障诊断中。文献[6]报道了一种基于相电流的多相多电平变换器的故障检测方法,通过检测相电流可以识别多电平变换器中短路和开路故障,但是无法准确定位故障器件。因此,无论分支中是否有健康的功率开关器件,容错算法都需要切断整个电路。文献[7]在多电平变换器中检测飞跨电容电压,可以准确定位故障器件。但是,广泛使用的FCMC电平数通常高于3,且为变换器中的每个功率开关器件都配备电流、电压传感器来检测变换器的健康状态,使得成本过高。除了成本因素以外,由于较大的无源分量,控制变量可能会缓慢地变化,从而导致故障诊断的时间持续较长。文献[8]提出一种基于磁分量电压的两电平DC-DC变换器故障检测方法,但是方法局限于两电平。文献[9]在直流系统中串联电感进行了分析。
针对现有的问题,本文提出一种基于磁分量电压的飞跨电容三电平DC-DC 变换器故障诊断策略。使用互感器获得磁性元件电感的电压,用比较器和AD模数转换器将电感电压转换成数字量来确定故障类型和位置,再通过容错设计保证变换器能够继续运行。这种新策略仅使用互感器,而无需添加任何新硬件,并且可以在2个载波周期内以较高的精度识别出故障类型和位置,因此具有成本较低、精度较高的优势。
1 故障诊断技术原理
图1 所示为单相三电平飞跨电容buck 变换器FCBC(flying-capacitor buck converter)示意。图中,VD、Vsw、vL和vo分别是源边输入电压、开关节点电压、电感电压和输出电压。变换器由单元1和单元2 串联组成。飞跨电容上的压降为vcf。假设每个单元下桥臂二极管的压降vl是单元l(l=1,2)的输出电压,由KVL定理可知

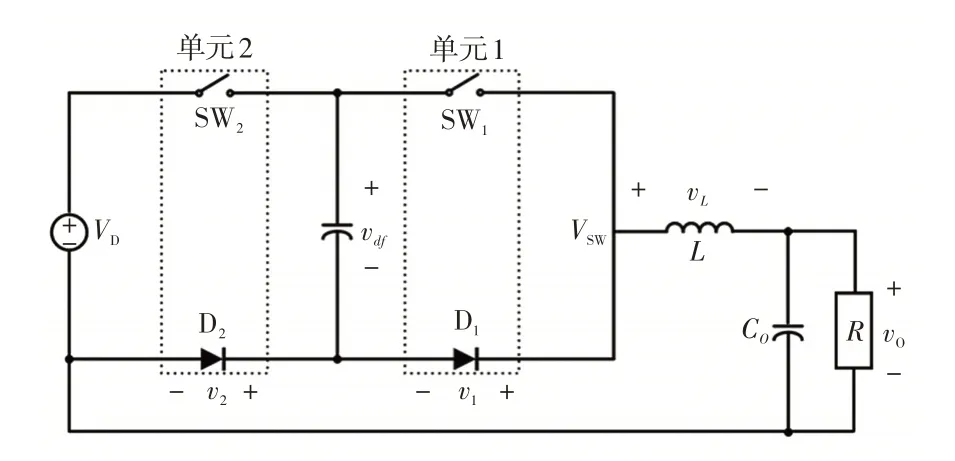
图1 单相三电平FCBC 示意Fig.1 Schematic of single-phase 3-level FCBC
本文采用相移载波脉宽调制PSCPWM(phase shift carrier pulse width modulation),其已经被应用于FCMC 线性调制领域中。定义开关函数Sk∈{0, }1 (k= 1,2),若Sk=0,则单元k的上桥臂功率开关器件断开;反之亦然。
由于相移载波调制可以平衡每个功率开关器件上的电应力,因此飞跨电容上的压降和每个开关单元的输出电压为
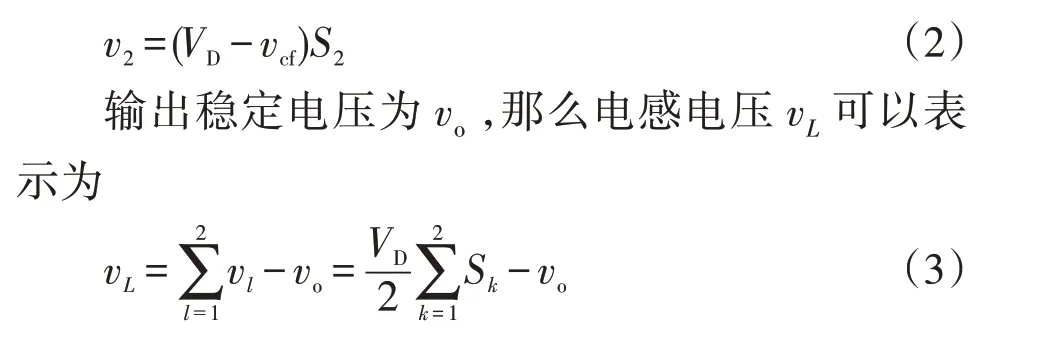
因此,电感电压会出现3种电平,即:vL(1)=VD-vo,vL(2)=VD/2-vo,vL(3)=-vo。模拟电路具有反应时间快、延时短的优点,所以本文采用互感器、电压比较器和AD模数转换器采集电感电压信息。设计的电压采样电路如图2所示。
大数据跟我们每个人相关,但我们绝大多数人其实并不掌握大数据,当然也不能从中直接获益。大数据掌握在极少数的机构手里,掌握在腾讯、阿里、百度等大公司手里。我们每个身处互联网的人其实不过扮演了大数据采集节点供应器的角色,让自己的数据汇入大数据的洪流之中,但我们闹得再欢腾,却也不过仅仅如此而已。我们绝大多数的个体并不是大数据宴会的真正拥有者,我们只是大数据的贡献者甚至是牺牲者。

图2 电压采样电路Fig.2 Voltage sampling circuit
假设比较器的参考电压为vcp(n)(n=1,2,3),设置vcp(n)与电感电压的3种电平存在以下关系

假设互感器的缩放比例系数为λ,则比较器的正输入vm=λvL。当vm大于负输入vcp(n)时,输出为高电平;反之,输出为低电平。比较器的输出端与AD模数转换器连接,分别将高、低电平模拟量转换成1和0的数字量SL(n)。
通过比较器和AD模数转换器将模拟量vL(n)依次转换成向量M(n),有
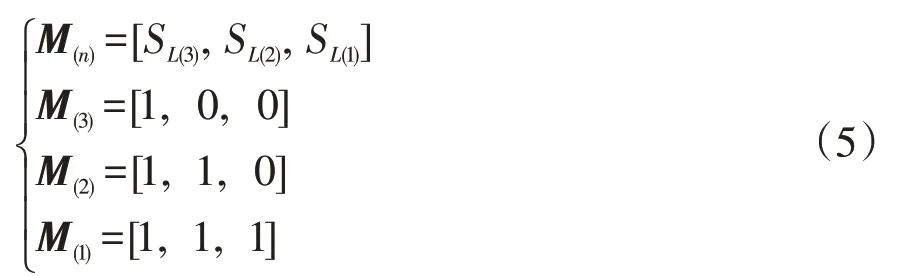
令Q=[M(3),M(2),M(1)]T,则Q为单位下三角矩阵。通过式(3),得出每组开关函数Sk都会对应一种电平,并且每种电平都会对应一组数字量SL(n)。假设在同一时刻,H为M(n)中1 的个数,h为开关函数Sk中1的个数,那么变换器在正常工作下,满足

当变换器发生功率开关器件故障时,则不再满足式(6)。
2 功率开关器件故障类型诊断和定位
使用Matlab/Simulink 仿真验证所提出的方法,建立基于宽禁带器件的三电平FCBC,移相载波频率ωc=100 kHz ,源边电压VD=100 V ,输出电压vo=40 V,飞跨电容Cf=40 μF ,电感L=500 μH,负载电阻R=50 Ω,负载电容Co=47 μF。设故障发生时刻为100 μs,不同故障的仿真波形如图3所示。

图3 模拟不同故障的三电平FCBC 仿真时域波形Fig.3 Simulated time-domain waveforms of 3-level FCBC under different faults
2.1 诊断故障类型
根据相移载波调制,变换器具有4种开关序列,即S1S2通过排列组合有4 种情况:00、01、10、11。将这4 种开关序列代入式(3),有:VD/2(0+0)-vo,VD/2(0+1)-vo,VD/2(1+0)-vo,VD/2(1+1)-vo,则vL会出现3 种电平,分别表示为:A=vL(1)=VD-vo,B=vL(2)=VD/2-vo,C=vL(3)=-vo。将这3 种电平转换成3 组数字量,对应关系如表1 所示。则单位下三角矩阵Q为

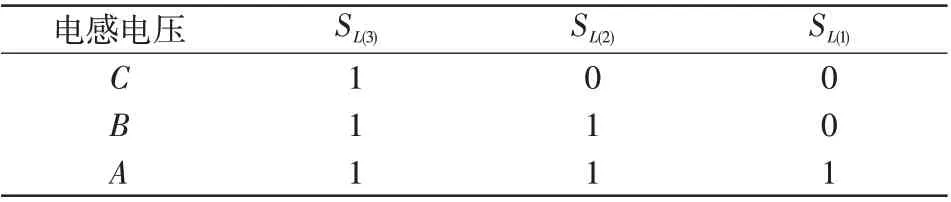
表1 模拟量与数字量的对应关系Tab.1 Correspondence between analog and digital quantities

表2 在正常和各种故障情况下,开关函数Sk 与数字量SL(n)的关系Tab.2 Correspondence between switching function Sk and digital quantity SL(n) under normal and various fault conditions
如果发生故障,4 种开关序列对应的4 个电感电压中,将会有特定的2个电感电压受到故障的影响而发生改变,偏离了正常值,从而导致特定的2组数字量SL(n)的改变。
如果发生短路故障,那么短路故障使数字量SL(n)特定位置的元素由0 变成1,不再满足式(6),而有H-h=2。如果发生开路故障,那么开路故障使数字量SL(n)特定位置的元素由1 变成0,不再满足式(6),而有H-h=0。
实时采集H、h的信息,当不满足式(6)时,诊断出故障。当H-h= 2 时,诊断为短路故障;当Hh=0时,诊断为开路故障,实现了故障类型的诊断。
2.2 故障定位
根据移相载波的特性,开关函数Sk的每次变化,只会改变开关函数中的一个元素,因此可以通过检测故障识别前后的开关函数实现故障的定位。假设在to时刻检测识别出故障,记录开关函数Sk(to)和上一个开关函数Sk(x),以S1为例,参考表3所示的真值表,作异或比较,即P=Sk(to)⊕Sk(x)。若P=10,则定位于单元1;若P=01,则定位于单元2。
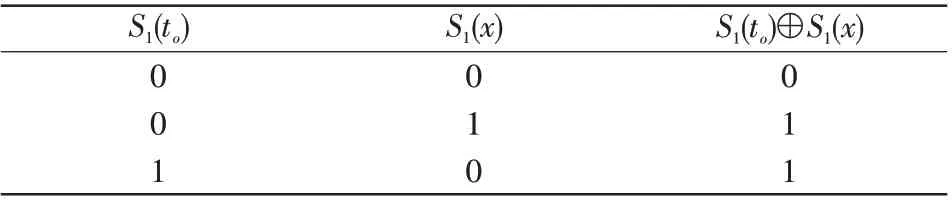
表3 S1(to)和S1(x)的真值表Tab.3 Truth table for S1(to) and S1(x)
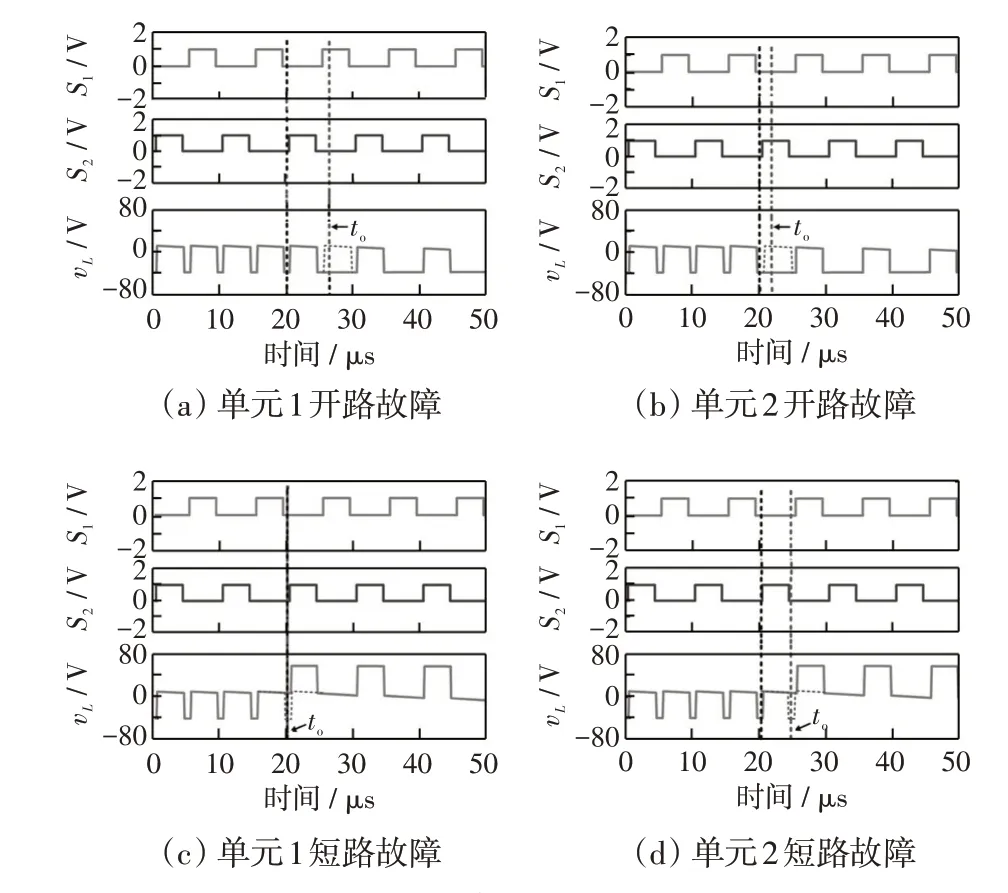
图4 故障识别和定位Fig.4 Fault identification and location
如果单元1发生开路故障,在to时刻检测识别故障,则开关函数Sk(to)=S1(to)S2(to)=10,上一个开关函数Sk(x)=S1(x)S2(x)=00,异或比较结果P=10。同理得,如果单元2发生开路故障,Sk(to)=S1(to)S2(to)=01,Sk(x)=S1(x)S2(x)=00,异或比较结果P= 01;如果单元1 发生短路故障,Sk(to)=S1(to)S2(to)=00,Sk(x)=S1(x)S2(x)=10,异或比较结果P=10;如果单元2发生短路故障,Sk(to)=S1(to)S2(to)=00,Sk(x)=S1(x)S2(x)=01,异或比较结果P=01。
2.3 故障诊断算法
图5 为故障诊断算法。图5(a)展示了变换器从正常运行-故障发生-故障检测-故障识别和定位的开关函数流程,横轴代表开关函数的变化。假设故障发生在开关函数Sk(t1)和Sk(t2)之间,则发现故障标志F(H-h,单元k)在开关函数Sk(t1)中,定位于复平面的(1,0)位置处。在随后的开关函数Sk(tn)中发现,通常F 将会出现在图5(b)标注的故障识别、定位的区域中,从而能够快速精准地识别故障并定位。通常在10 μs内可实现故障识别和定位。
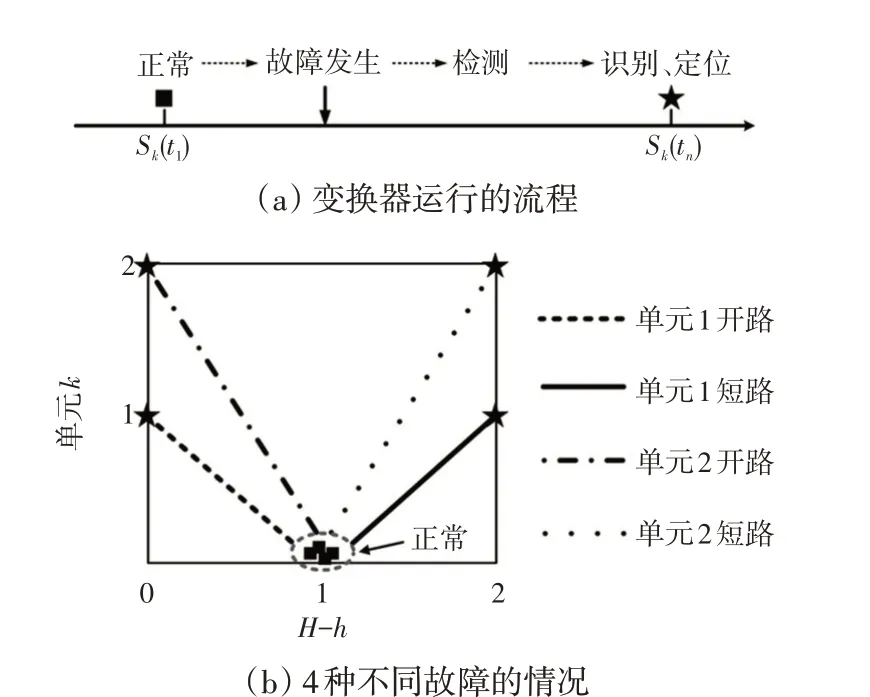
图5 故障诊断算法Fig.5 Fault diagnosis algorithm
3 实验分析
为了验证所提出的故障检测策略,设计并搭建了一个基于Si MOSFET 的三电平FCBC 实验平台。控制器选择FPGA(Artix-7 100T AX7102),Si功率开关器件选择英飞凌的IRFP4110PbF,源边电压VD=25 V,输出电压vo=8 V,飞跨电容Co=47 μF,电感L=500 μH ,负载电阻R=50 Ω ,负载电容Co=47 μF,开关频率ωc=100 kHz。
设故障发生时刻为20 μs,在4 种故障下测得S1、S2和vL的波形如图6所示。图7为使用不同形状校准故障发生后故障标志F 在复平面的坐标变化,各形状中的数字代表开关函数的变化步骤。假设故障发生在步骤1 和2 之间。当单元1 开路时,发现F 在步骤1、2、3时都定位于坐标(1,0)处,F在步骤4时定位于坐标(0,1);当单元2开路时,发现F在步骤1 时定位于坐标(1,0)处,F 在步骤2 时定位于坐标(0,2);当单元1 短路时,发现F 在步骤1 时定位于坐标(1,0)处,F 在步骤1 时定位于坐标(2,1),代表着故障发生的同时识别和定位故障;当单元2短路时,发现F在步骤1、2时都定位于坐标(1,0)处,F在步骤3时定位于坐标(2,2)。实验结果与图5的分析相一致,因此实现了故障的快速识别和定位,总的诊断时间在10 μs以内。
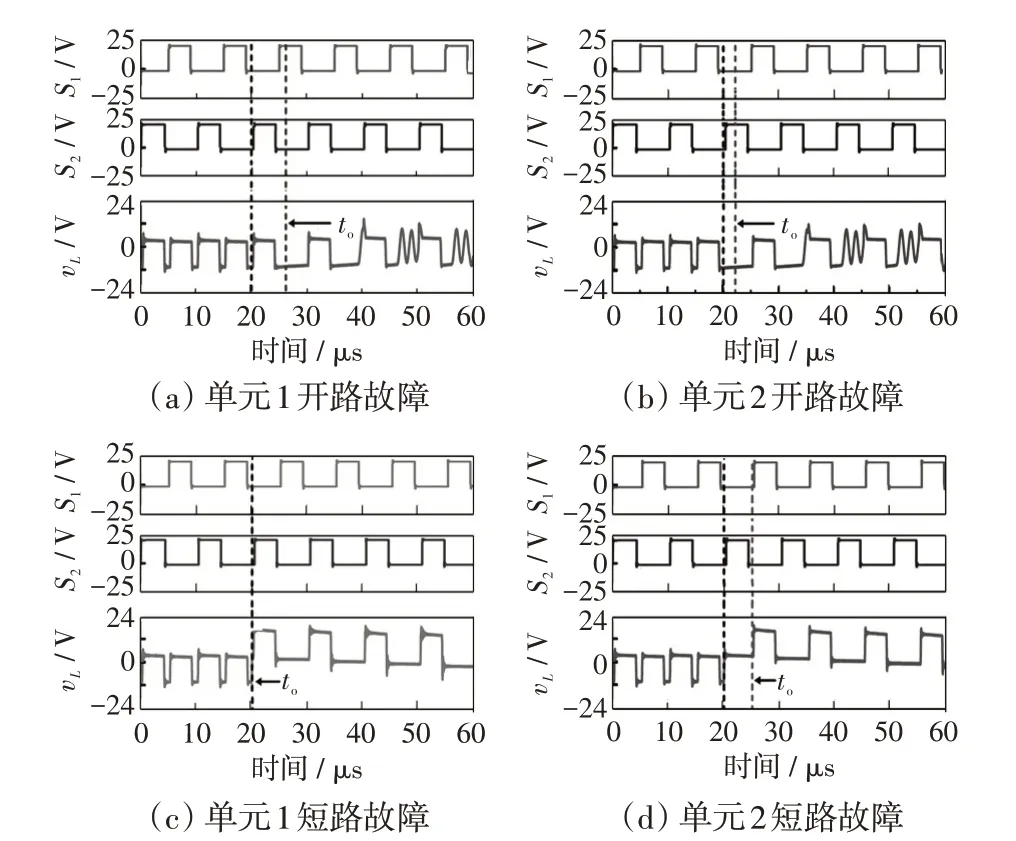
图6 在4 种故障下测得的S1、S2 和vL 波形Fig.6 S1,S2 and vL waveforms measured under four different faults
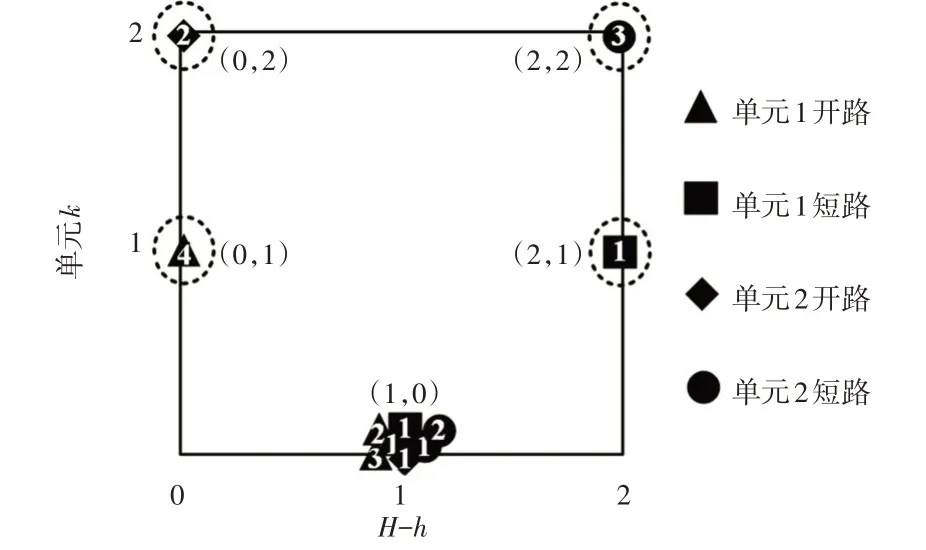
图7 故障标志F 在复平面上的变化Fig.7 Changes in fault sign F on the complex plane
4 结 语
本文提出了一种用于检测、识别和定位三电平FCBC中功率开关器件故障的新技术。通过连续分析电感器电压和开关函数来识别故障类型和定位,仿真和实验验证了三电平FCBC功率开关器件故障检测的新策略。功率开关器件故障的及时检测对于多电平变换器的容错运行至关重要,从而保证变换器的可靠性,提高系统的稳定性。
