M9在丹东潮位站水下地形测量中的应用
2021-09-24梁帅
梁 帅
(辽宁省丹东水文局,辽宁 丹东 118001)
1 概述
现代化仪器的应用为水文事业的发展提供了便利性,M9是一种新型的水文河流流量测验仪器,即声学多普勒剖面仪(ADP)系统,它的使用极大地方便了流量测验,为河流流量测验节省了大量的人力、物力。
丹东潮位站水面较宽,最宽处河宽超过1 km。潮水位变化较大,一般每日变幅为4~5 m,受潮水每天涨落影响,河道水流冲刷频繁,断面冲淤变化较大,水下断面复杂,测量困难,每次测量需要耗费大量人力、物力,难以保持精度要求。潮位站泥沙含量较大,当采用高频率测量时,穿透性差,精度较高;采用低频率测量时,穿透性强,但精度较低。M9能够在测量过程中自动分配采用某个频率的换能器和不同频率的采样波束,减少了人为的判断;同时M9配备的垂直波束,也能够满足高含沙量的水深测量要求,保证了流量和水深的测量精度。
水下地形测量一般要求两部分,即各断面点的平面位置坐标和相应水深。各断面的平面坐标可通过M9自带的RTK GPS进行定位得到,水深可采用得到的M9垂直波束水深或者底跟踪平均水深,经后期计算得到每一个测点的具体水深,理论上具有可行性。探索M9在潮位站的水下地形测量的分析研究,能够扩展M9的应用领域,减少潮位站水下地形测量的难度,同时减少了各类危险因素,为水文职工的安全增加了保障。
2 M9简介及应用
M9即声学多普勒剖面仪(ADP)系统,一般由各类传感器、换能器、测深仪及固定设备等组成:①传感器主要包括温度传感器、罗经传感器、纵摇传感器和横摇传感器等;②换能器主要包含有4个3.0 MHz和4个1.0 MHz的对称结构的测速探头;③测深仪包含有一个0.5 MHz的垂直波束回声测深仪;④固定设备主要指各类集成设备、电源、通讯设备等。
M9提供了3种仪器配置,即主机遥测模式配置、差分GPS模式配置和实时载波相位差分技术(RTK)模式配置。①主机遥测模式配置中,主机PCM中没有配置GPS模块,只能采用底跟踪模式进行测量,在河流有动底时,无法采用此配置或者说测得的流量数据会偏小;②差分GPS模式配置中,主机PCM模块中配备了差分GPS接收器和外置天线,主机PCM模块以10Hz的采用频率接受DGPS数据,并传输到ADP的内置存储器中进行数据处理,之后ADP将处理后的数据传输到计算机中,差分GPS模式配置定位精度为亚米级,通常在河宽大于20米时使用;③实时载波相位差分技术(RTK)模式配置中,主机PCM中增加了RTK相关模块及扩频无线电台,同时需要在岸边设立单独的RTK基站;该RTK基站系统主要由RTK GPS接收器、外置的高增益GPS天线、扩频无线电台调制解调器、外置高增益电台天线和三脚架组成;在工作时岸边的RTK基站和船上的ADP以10Hz的采样频率接收GPS定位数据,同时RTK GPS以1Hz的采样频率从RTK基站的扩频无线电台给安装在船体上的主机PCM提供校正信号;RTK模式的定位精度能够达到±3 cm,精度很高,能够满足各类河道流量的测量要求。
利用M9进行潮位站水下地形测量,其实质是利用M9的实时载波相位差分技术(RTK)模式配置,利用GPS采集平面坐标,利用M9测深系统采集测量水深,并经后期数据处理得到断面的三维坐标,之后可以利用Excel或Cass成图系统生成点位坐标或水下立体图形,为水下地形测量提供新的思路。
3 地形测量及成果分析
水文中常用的测量一般有水下断面测量和水下地势测量,断面测量较为常见,用处较多;水下地势测量较为复杂,测量较少。
3.1 水下断面测量
水下断面测量作为常见的水文测量,在实际操作中经常遇到。利用M9进行水下断面测量时可采用走航法。首先连接好仪器,检查M9各仪器的状态,设置M9相关参数,如磁偏角、换能器入水深、盐度、筛选距离、水深参考和坐标系统等参数;然后在正式测量前对仪器进行罗盘校正和系统测试,待仪器一切正常后才能开始操作。
以丹东潮位站测量为例,首先确立断面左右岸的断面位置,派专人记录测量过程中断面处潮水位的变化过程,按水尺读数规范记录。RTK锁定一般需要10 min,确定RTK锁定后启动断面测量。在测量前让ADP在岸边起点停靠,量取精确的换能器入水深,并让GPS对起点有足够时间进行定位,通过计算机软件检查经纬度坐标或位置坐标;在采集不少于10组数据后开始走航,走航过程中应保持匀速,并使船速不宜过大,使航迹应尽量与测流断面线重合,保证断面的直线性。到达终点时,需等仪器记录完本次测量后才能进行船头调转操作。同时为保证测量精度进行返回测量,方法同正测。在走航测量过程中走航的起点和终点必须和左右岸的断面点重合。
测量结束后,导出ASCII数据,使用RiverSur⁃veyorLive数据处理软件对导出的数据进行处理。导出的数据坐标为经纬度格式,在进行断面计算时可使用Excel进行起点距的计算和校正。丹东潮位站断面处测量数据导出经处理后结果见表1。

表1 丹东潮位站水下断面数据处理后结果表
采用垂直波束水深,结合换能器入水深度以及测验过程中水位的变化过程,对测量点的河底高程进行整理计算。潮位站平面坐标采用RTK模式下的定位坐标,如有需要可转换为世界地理坐标系统。潮位为了保证测量结果的准确度,对潮位站断面进行往返测量,并比较每次测量相同起点距处坐标以及起点和终点处坐标,并绘制测量断面处大断面合绘图,进行结果的分析比较。经计算得到的潮位站断面合绘图结果见图1。
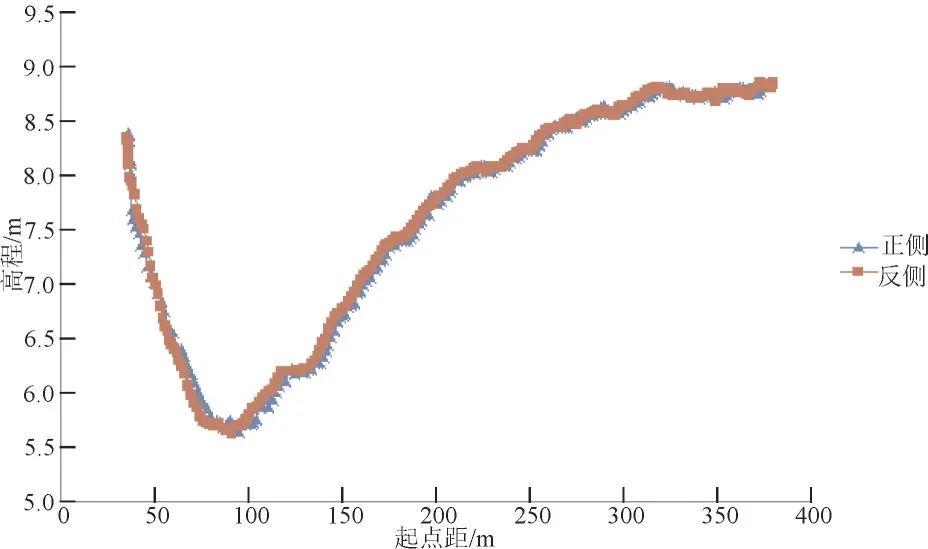
图1 潮位站水下断面合绘图
由图1可以看出,水下断面正测和返测重合性较好,水下断面变化一致,断面连续性和完整性比较好。因M9数据采集比较密集,数据采集较快,从导出数据来看可以达到一秒钟一次,计算得到的起点距数据可以看出每1 m距离就有一组高程数据,对于水下断面的连续性变化可以得到很好的控制,同时采用RTK GPS的测量配置,定位精度达到厘米级,测量结果比较可靠。
3.2 水下地势测量
水下地势测量主要包括前期仪器测量和后期数据处理两方面。利用M9进行水下地势测量时,前期仪器检查和断面测量一致。正式开始以后,需要在划定的水面范围内进行测量,仪器走航的密度取决于地势的复杂程度,潮位站水下地形较为复杂,可以根据实际情况相对走密集一些,其余操作步骤同断面测量。
测量结束后,导出ASCII数据,同样使用River⁃SurveyorLive数据处理软件对导出的数据进行处理。导出的数据坐标为经纬度格式,需要使用坐标转换软件或Arcgis对坐标进行批量处理,以满足后期数据处理的要求。在对测量的数据进行转换处理以后,可以使用南方Cass软件生成水下地势三维模型。首先,将处理后的数据导入软件,建立数字地面模型,也称为DTM模型。DTM模型指在一定区域范围内规划格网点或三角网点的平面坐标(x,y)和其他物性的数据集合,如果此地物性质是该点的高程z,则此数字地面模型又称为数字高程模型(DEM),本次建立的模型实质为水下DEM模型。然后,绘制等高线,建立三维模型,在模型建立时需要根据实际输入相关参数,最后生成水下DEM模型(见图2)。
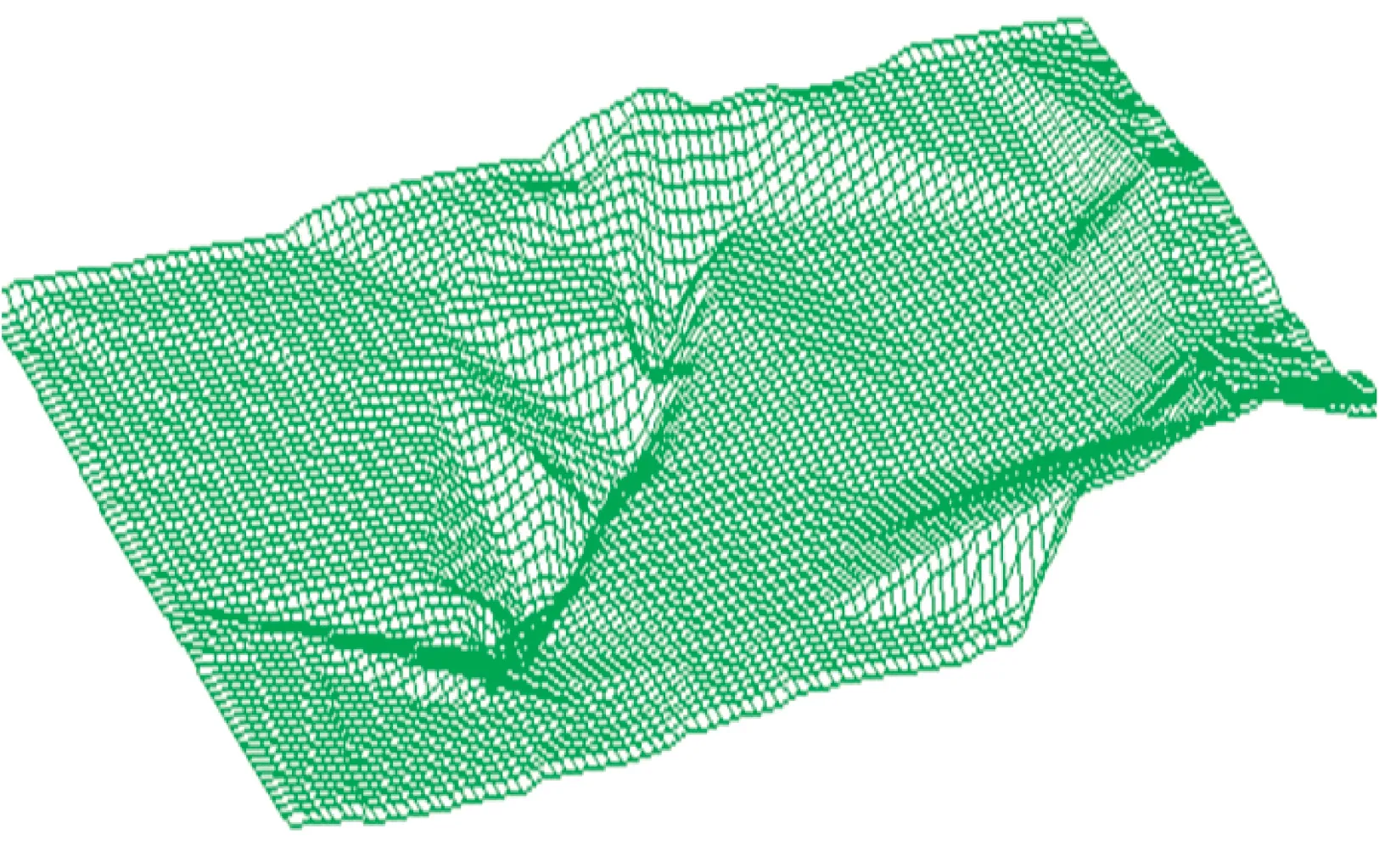
图2 潮位站水下DEM模型图
水下DEM模型从能比较直观的显示水下地形状况,对于了解和掌握受潮水影响和河道冲淤变化的水下地势有重要意义。通过M9对潮位站水下地势的测量以及后期的数据处理和分析,能够建立潮位站断面附近的“数字河流”,为水文发展提供便利。
4 结语
利用M9进行潮位站水下地形测量具有可行性,测量数据连续性好,实时性高,对于断面变化的节点控制性好,保证了水下断面测量的完整性和准确性。同时基于RTK配置模式下的M9对于水面三维坐标的采集具有突出优势,结合特定软件处理,后期生成的水下DEM模型能够直观的显示出水下地形的变化情况,对于水下地形的测量具有重要的意义。
