基于STM32的风机塔筒倾斜角测量装置的设计与实现
2021-09-23胡文杰
胡文杰


【摘要】 本文阐述了加速度传感器测量角度值的具体原理,设计并研制了以STM32单片机为控制核心, 由ADXL345加速度传感器,通讯模块,显示器模块等电路元器件组成的硬件装置。该装置能在塔筒的倾斜范围内完成精确的数据采集,而后经过通讯模块输送到计算机后台,方便实现后台数据的统计与分析。
【关键词】 STM32 ADXL345 无线通讯 风机塔筒 角度测量
引言:
确保风机的安全运营是风电行业的重要工作。目前,我国的主力风力发电机组机组为1500KW,其塔高65m,属于高耸建筑。风机塔筒是风电机组的主要支撑装置,在机组正常工作时,塔筒会因风轮等大型部件的荷载变化而产生变形倾斜现象,严重地甚至造成了倒塔事故。对风机塔筒的倾斜角监测是评估装机是否合格的重要依据,也是日常运维值得关注的一项指标。
基于此,本文设计了一种针对塔筒测量的前端设备, 该设备要求在塔体可能倾斜区域内排除振动干扰并做出精确的测量,同时通过蓝牙通讯模块,能够将角度数据送入后台。为完成该测量设备的设计要求, 本设计应用了32位超低功耗单片机STM32,由它来配合有关模组,利用程序来实现测显与通讯的功能。
一、硬件系统设计
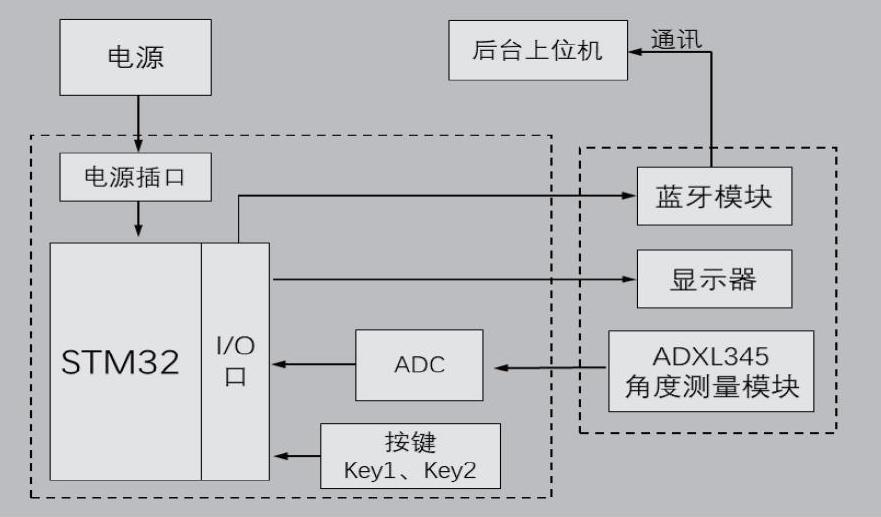
硬件系统电路由电源电路、STM32微处理器及外围电路、ADXL203加速度传感器、显示器模块及蓝牙通信模块组成。其中,STM32微处理器及外围电路包括复位电路、晶振电路、电容电感滤波电路组成。硬件系统采用模块化结构设计, 方便在Keil平台利用C语言开发编程实现。
系统框图中,按键Key1、Key2主要是用来启动角度测量或显示;单排针座Header设计的目的是为了便于电路与外部子模块插接相连。
标号X、Y、Z的管脚分别与加速度传感器的三个测量轴相连接,通过ADC模块进行电位采集,并送入STM32编程得到角度值,最后驱动显示器显示角度。当加速度为最大值时,对应单片机管脚电压为最大值。当加速度为最小值时,对应单片机管脚电压为最小值。在此范围内,加速度值变化与管脚电位为线性关系。
本系统使用ADC0809数模转化器,用来将加速度传感器采集到的电压模拟信号,通过逐次积分后转换成8位数字信号。该数模转化器正常工作时需要利用500K转换时钟信号CLK将单片机ALE管脚的2M频率信号进行四分频运算,该功能的实现可由74LS393芯片辅助完成。
二、软件设计
2.1 倾斜角测量原理
ADXL345是ADI公司推出的三轴数字加速度计,具有低功耗、体积小,测量分辨率高(13位)等特性,同时具备16Bit数字输出,高达4mg/LSB的灵敏度,适合用作测量模块实现角度的测量。
当芯片水平静置时测量轴与重力加速度方向如图3所示。显然,此时X、Y轴方向的加速度分量为0g,而Z轴方向的加速度分量为g。
更一般的情况为芯片发生倾斜,各测量轴与水平方向有一些夹角,则其图像如图4所示。
标定X轴、Y轴、Z轴方向的加速度分别为AX、AY、AZ,与水平线的夹角分别为α1、β1、γ1,与重力加速度的夹角分别为α、β、γ。
则根据角度关系,g在各轴方向上的分量为:
AX =g×cosα=g×sinα1
AY =g×cosβ=g×sinβ1
AZ =g×cosγ=g×sinγ1
即sinαK =AK /g, K指代X,Y,Z (1)
在测量轴与重力方向的二维平面内,加速关系为 g2=AK2+(g×cosαK)2,进一步得到
, K指代X,Y,Z (2)
由(1)(2)可推得:
最后利用反三角函数计算各轴的弧度值,并转化为角度值:
式中,三轴加速度大小AX、AY、AZ可在单片机控制下由ADC模块测得。
2.2系统流程图
单片机软件程序主要是完成采集、测量、显示等基本功能, 同时还需要解决零度角校准、振动误差优化、通讯问题。
对于软件程序的运行,在硬件系统初始化处理结束后,分配双线程,一个线程负责角度数据的读取、存储和管理,另一个线程负责下发报文的解析和传输,具体流程如图5所示[1]。
2.3上位机开发
开发了上位机配置软件,可根据不同的场合要求修改角度测量装置的内置程序满足实际应用。可配置内容包括波特率、数据位、获得数据的模式以及传输速度等,如图6所示。
实际情况中,风机塔筒工作地基存在较小的绝对的倾斜角度,因此在测量角度时应当考虑零度角已倾斜的一般情况。解决办法是:在电源供电输入按键信息的初始时刻,装置需要选取并保存起始时刻的绝对角度,以后每次计算角度均需要减去这个角度以此得到相对地基的倾斜角度。
关于振动问题,一般在塔筒正常工况及弱风作用下,塔筒都会持续经历较小的振动,振动大小主要因塔筒质量、风速而有所不同[2]。要正确排除较小的振动误差干扰,需要同时采用两种方法:一是程序优化,即发现有较小角度持续变化时,软件延时一段时间再检测,此时应当使角度值稳定在上一次的测量值;二是硬件优化,即用基本RS触发器、单稳电路、RC滤波器等通过稳压来减少干扰。此外,还可以使用更为复杂的算法进行滤波处理。
三、结束语
文章设计了基于STM32的风机塔筒测量装置的硬件系统,使用Altium Designer软件搭建硬件电路系统,Keil编程实现模块功能。与传统角度测量仪器相比,该装置成本低、可靠性强,能在塔筒可能发生倾斜的区域内作出精确测量并在显示屏上显示,其测量精度达0.1度。同时,在硬件及程序上优化了振动误差的干扰,并制作上位机软件以实现角度值通过有线或无线通讯传输给计算机终端。另外,该装置具备零度角校准功能,防止使用年限久或其他原因造成基准零度角不准确。
参 考 文 献
[1]姚步堂,赵江海.机器人关节角度测量装置的设计及标定方法[J].电子世界,2019(14):5-8.
[2]陈云花. 基于振動测试的大型风力发电机组运行状态监测研究[D].内蒙古科技大学,2009.
