永磁同步电机模糊PID-内模控制系统研究
2021-09-23刘宗锋荣德慧王世国张沙沙
刘宗锋,荣德慧,王世国,张沙沙
(1.山东科技大学交通学院,山东 青岛266590;2.山东海大机器人科技有限公司,山东 日照276800)
1 引言
随着电动汽车大量应用、电子技术以及电机控制技术的发展,电动汽车的电传动系统中可以取消离合器和同步器,驱动电机和变速器集成化[1]减少了传动系统的机械损失和变速器在换挡过程中的动力中断时间。在取消了离合器和同步器装置的电传动系统的变速过程中,为了获得和传统汽车有同样的换挡品质,通过驱动电机的自由模式和调速模式实现换挡过程中离合器和同步器的动力中断和同步过程,因此驱动电机控制性能的好坏决定了纯电动汽车变速器换挡性能的优良与否。
永 磁 同 步 电 机(Permanent Magnet Synchronous Motor,PMSM)具有功率高、起动转矩大、力能指标好、电枢反应小和控制方便等优点,在电动汽车的电传动系统中作为驱动源得到了大量应用[2-3]。由于PMSM具有较强非线性和耦合性,矢量控制通过坐标变换理论使磁通和和转矩单独控制[4-5],并和直接转矩控制[6-7]、滑模控制[8-9]等控制方法组成控制系统。PID是电流环和转速环常用的控制方法,为了使驱动电机在实际的运行工况下有良好的动态运行特性,PMSM控制系统会在传统PID基础上与新型控制方法一起使用,来提高传统静态PID控制性能[10-12]。
电传动系统中PMSM控制系统,电流环和转速环决定着转矩输出和调速性能,同时转矩输出响应和调速性能是影响实际应用性能的重要因素[13]。本文通过内模控制算法对永磁同步电机电流环进行解耦并进行PI参数整定,并在传统PID控制的基础上建立转速环模糊控制器,最后建立Matlab/simulink仿真模型,并进行仿真实验验证永磁同步电机控制系统的转矩输出和调速性能的灵敏性和稳定性。
2 电流环内模PI控制
内模控制是通过并联一个与被控对象模型基本一样的过程控制模型,利用其输出与实际控制对象的输出之差反馈到控制器的控制端,来抑制由于参数的变化、模型不匹配和外界干扰信号等原因带来的扰动,进而提高控制系统的稳定性[14]。
2.1 内模控制原理
内模控制的原理图,如图1所示。Q(s)为内模控制器,P(s)为控制对象,M(s)为参考模型(即内模)。对图1进行简化,如图2所示。

图1 内模控制原理图Fig.1 The Schematic Diagram of Internal Model Control
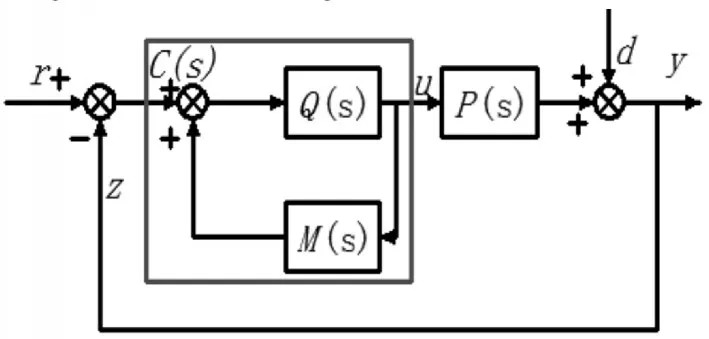
图2 内模控制等效原理图Fig.2 The Equivalent Principle Diagram of Internal Model
内模控制的等效控制器为:

输入与输出关系可以表示为:
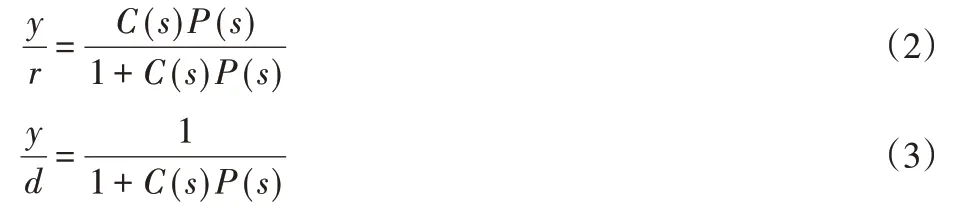
将以上三式整理得到:
则系统的闭环响应为:

由式(6)可知如果P(s)=M(s),则系统的闭环响应可以化简为:

若此时Q(s)=M-1(s),则系统就会消除外界的干扰,使系统具有很好的抗干扰性。
此时传递函数变为:

2.2 电流环PI整定
PMSM的d-q坐标系的电流方程为:
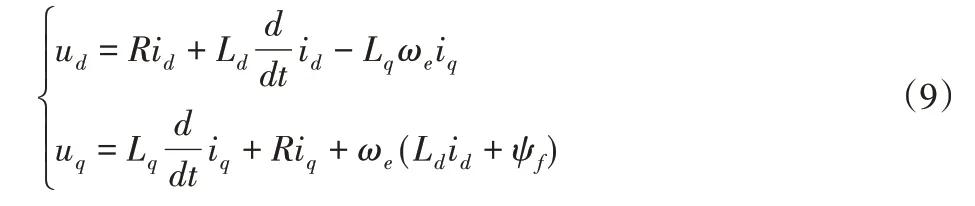
式中:ud,uq-d-q轴电压;Ld,Lq-d-q轴电感;id,iq-d-q轴电流;R-定子电阻;ψf-永磁磁链;ωe-转子电角速度。
由于定子d-q轴的电流分别在d轴方向和q轴方向会产生交叉耦合现象,因此要想单独通过控制d轴和q轴的电流达到控制电机转矩的目的,要对驱动电机的d-q轴电流方程进行解耦,即id,iq完全解耦[15],电流方程变为:

式中:ud0uq0-电流解耦后d轴和q轴电压。
对上述的(10)进行拉普拉斯变化,得到:

对永磁同步电机的电流环采用常规的PI整定并结合前馈控制。得到d-q轴的电压为

式中:kpd,kpq-PI控制的比例增益;kidkiq-PI控制的积分增益。
根据文献[16],在电机控制的过程中,为了消除在同步旋转的坐标系下反电动势和电流的耦合对电流环的影响,引入反电动势补偿项和电流交叉解耦项,从而使d-q轴的电流实现单独控制。此时可以将电流环闭环控制系统传递函数为

式中:α—电流环带宽。由于电流环带宽和电机的时间常数有关,即τ=min{ }Lq R,Ld R。通过电流环带宽和电机时间常数之间的关系,可知α=2πτ。通过以上分析可知电流环的传递函数

式中:L(s)=αI(s+α);α-控制参数。
通过内模控制原理以及式(1)、式(11)、式(13)可得:

通过以上分析可得PI的整定值:
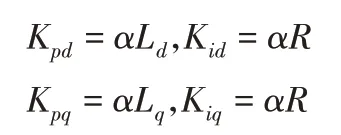
由以上分析可知,内模控制具有结构简单,增强系统的抗干扰性等优点,简化了电流环的控制参数,通过选取参数α便可以实现PI控制。由于α和电流环的频率有关系,根据电机参数来整定PI参数,提高了参数的准确性和精度,同时电流环截止频率与逆变器开关频率取值范围对电流环的性能有影响,制定和电机控制系统相适应的逆变器开关频率即周期,其目的为避免逆变器产生的复杂的开关谐波对控制系统带来的干扰[11],使控制系统具有很好的稳定性,本文中逆变器的周期为Ts=10μs。
3 转速环模糊控制
在永磁同步应用的环境中,转速往往是一动态的变化值,PMSM调速特性是决定换挡过程中主动同步性能好坏的主要因素,为了提高驱动电机转速环的动态控制性能,在传统转速环PID的基础上建立了模糊控制。模糊控制是基于人工经验的智能控制方法,模糊控制的制定不需要控制对象的精确模型,可以根据以往的人工经验制定模糊推理过程即可达到理想的控制效果。
模糊控制器是模糊控制理论核心部分。模糊控制器的制定主要包括模糊化过程,制定模糊推理规则和反模糊化三个重要组成部分。文制定的模糊控制器是以转速差ω和转速差的变化率ωc作为输入量,以传统PID的比例环节,积分环节和微分环节的微小的变化值△kp,△ki,△kd为输出量,主要的控制原理,如图3所示。
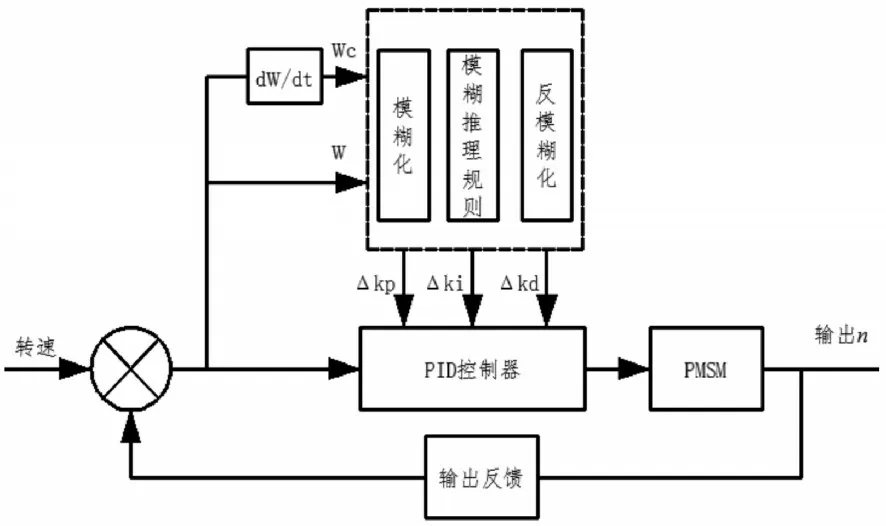
图3 模糊PID的控制原理Fig.3 The Control Principle of Fuzzy PID
根据以往人工经验并通过模糊控制器模糊规则制定可以得到传统PID的动态调整量,传统的PID控制加上动态调整量便可得到最终的PID的动态控制参数,PID的各项控制参数即

式中:kp0、ki0、kd0-传统PID的整定值,初值通过试凑法得kp0=7,ki0=2,kd0=0.13。
3.1 模糊控制器推理系统的设计
模糊控制器输入量和输出量都是连续变化的量,需要对其进行离散化处理。控制过程的实际值的变化量的变化范围为[-N,N],模糊论域值为[-S,S],因此输入量的量化因子为ke=kec=S/N,输出量的量化因子为kp=ki=kd=N/S。
本文选定输入和输出的模糊论域值为[-3,3],其论域值对应七个模糊子集负大、负中、负小、正小、正中、正大,即{NB,NM,NS,ZO,PS,PM,PB},同时输入量和输出量的隶属函数均服从三角形曲线分布。
3.2 模糊规则的制定
模糊规则决定着动态PID控制性能,由于模糊控制的输入为转速差ω和转速差变化率ωc,本文模糊规则是在实际的经验情况下制定的,规则如下[17-18]:
(1)当|ω|较大时,较大的kp和kd可以加快系统的响应速度,另外为了防止在加快响应速度时出现较大的超调量,应取较小的ki值。
(2)当ω和ωc中等大小时,有以下两种情况:当ω和ωc同号,ki和kd应取得大一些来使系统的有较小的超调量,同时kp可取较小值;当ω和ωc异号,应适当减小kp,ki和kd,防止被控量接近给定值影响其动态性能。
(3)当|ω|较小时,为了使系统获得较好的稳定性,应减弱比例和微分的作用,甚至可以将kd设为0,并加强积分的作用,可以将ki的值设为最大值,以防止ω微小变化引起的系统震荡。
(4)ωc的表示偏差变化的速度,|ωc|越大,ki越大,反之亦然。
根据以上原则制定模糊推理查询表,如表1所示。
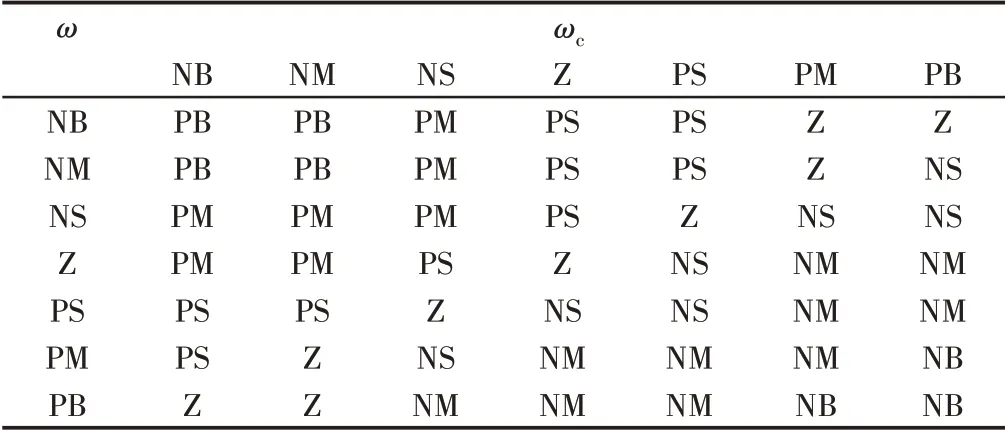
表1 △Kp的模糊规则表Tab.1 The Fuzzy Rule Table of Delta Kp
以同样的原理可以制定△Ki,△Kd的模糊规则查询表。根据模糊规则查询表,建立相应模糊推理系统,模糊推理应用Mamdani直接推理法,其中△kp模糊推理的三维图如图4所示。
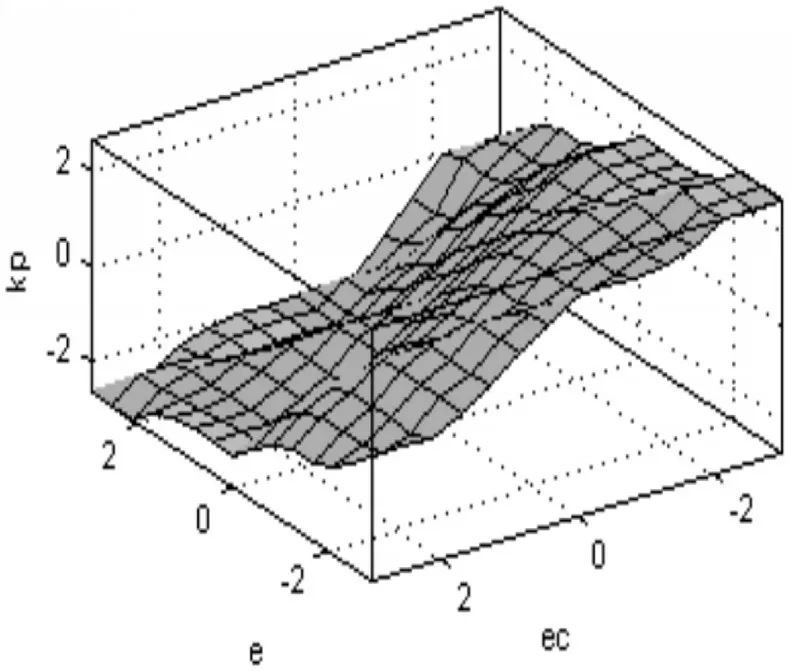
图4 △kp的模糊推理的三维图Fig.4 The Three-dimensional Graph of Fuzzy Inference of△Kp
4 PMSM控制的仿真分析
为了验证本文中的PMSM电流环和转速环控制方法的控制性能,在Matlab/simulink的仿真环境下建立如图5的PMSM调速系统的仿真模型,模型中包括矢量控制环节,解耦后的id,iq电流环的内模PI控制环节以及转速环模糊PID控制环节。所建立的仿真模型中,假设:电机绕组完全对称,磁场波形稳定。模型中电机使用的具体参数[19],如表2所示。

图5 永磁同步电机调速的matlab/simulink仿真模型Fig.5 The Matlab/Simulink Simulation Model of PMSM Speed Regulation
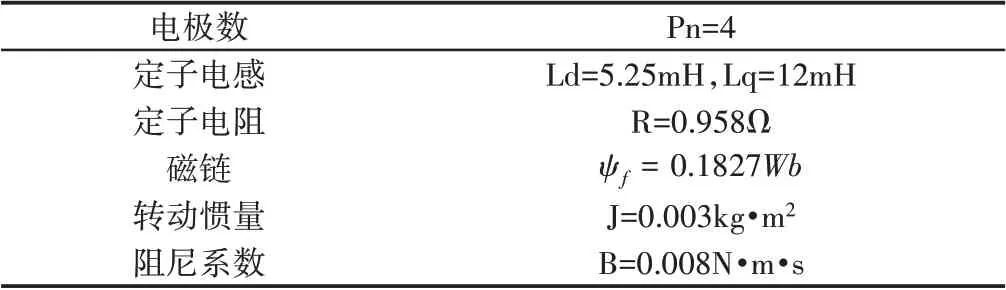
表2 永磁同步电机参数Tab.2 The Parameters of Permanent Magnet Synchronous Motor
仿真条件设置为:仿真时间设置为0.4s,目标转速设定为Nr=1000r/min;初始时刻负载转矩为TL=0N·m,在t=0.2s是增加负载转矩为TL=10N·m,α=1100rad/s。
图6,图7,图8为仿真结果图,转矩和转速的响应特性,如图6和图7所示,由图可知电流环内模PI控制和转速环模糊PID控制使PMSM控制系统获到良好的调速性能,超调量小,转速波动较小;在0.2s时增加10N·m的负载时,转速稳定性更好,恢复时间更短,且转矩输出特性平稳,反应迅速。矢量控制的三相电流iabc,如图8所示,由图可知控制系统中的三相电流iabc初跳动量小,更加稳定。
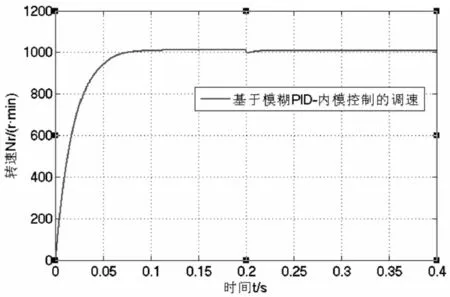
图6 电机转速Nr的变化曲线Fig.6 The Change Curve of Speed N
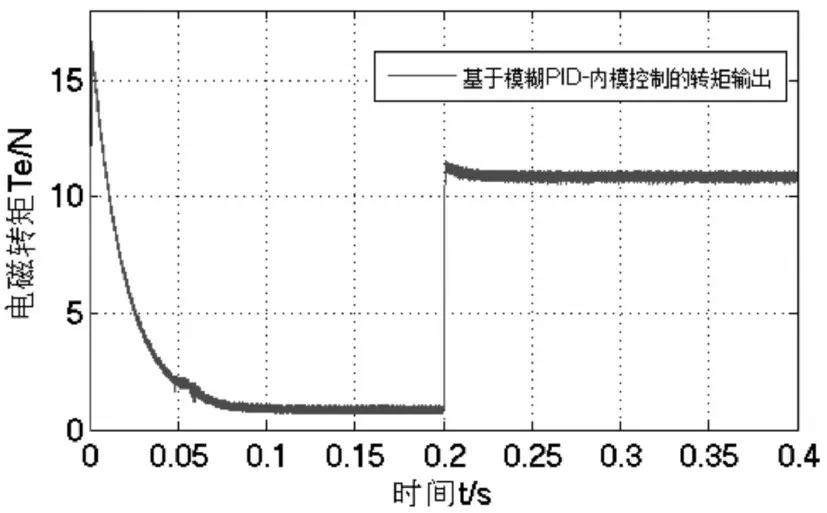
图7 电磁转矩Te的变化曲线Fig.7 the Change Curve of Electromagnetic Torque Te
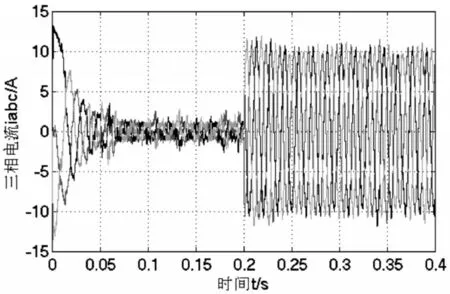
图8 三相电流iabc的变化曲线Fig.8 The Change Curve of The Three-Phase Current iabc
5 结论
为解决电传动系统中作为驱动源的永磁同步电机转矩输出特性和调速特性,本文在PMSM控制系统中建立了电流环内模PI控制和转速环模糊PID控制算法。简化了电流环PI参数的整定,将PI参数的整定转化为α的选取,使控制参数更加精确,并建立了转速环自适应的模糊控制,增加了PMSM系统的动态特性。通过上述仿真结果可知,内模PI和模糊控制PID算法使永磁同步电机调速性能更加平稳、阶跃量更小;转矩输出准确性高,超调量小,在增加负载的情况下反应迅速稳定性好,系统具有更好的鲁棒性。