脉冲负载下模糊PID调速器控制柴油发电机的研究
2021-09-23赵志魁黄克峰李欣鹏
赵志魁 徐 晔 黄克峰 李欣鹏
脉冲负载下模糊PID调速器控制柴油发电机的研究
赵志魁1徐 晔1黄克峰1李欣鹏2
(1. 陆军工程大学国防工程学院,南京 210007;2. 解放军95928部队,山东 临沂 276216)
为解决脉冲负载条件下,常规PID调速系统控制的柴油发电机会出现电压波形严重畸变和频率剧烈波动等电能质量问题,本文通过借鉴模糊控制在非线性控制中的优点,提出一种利用模糊PID调速器控制调速系统改善柴油发电机输出电能质量的方法,分析模糊PID控制原理,在Matlab/Simulink中搭建柴油发电机带脉冲负载仿真模型,并针对两种调速系统进行仿真对比。结果表明,在脉冲负载条件下,模糊PID调速系统相较于常规PID调速系统有更好的实时调节性能,能够较好地改善系统电能质量。
柴油发电机;脉冲负载;模糊PID控制;建模仿真
0 引言
随着信息技术的迅猛发展,电力系统中以相控阵雷达、激光武器为典型代表的脉冲负载所占比重越来越高。其负荷特性具有峰值功率高、平均功率低的特点,且呈连续的脉冲特性,周期从几十到数百毫秒不等。与大电网不同,柴油发电机组的容量和惯性都比较小,脉冲负载的连续冲击作用使柴油发电机组带脉冲负载系统母线电压幅值和频率不断波动,电能质量不能满足负荷需求,严重时甚至造成系统崩溃。其直接原因是脉冲负载条件下,柴油机的调速系统不能维持转速稳定。在实际应用过程中,为了使柴油发电机组在带脉冲负载工作时既能可靠稳定运行又能保证电能质量满足负荷需求,多采用“大马拉小车”的方式,造成机组过度配置,浪费资源。因此,提高柴油发电机组的转速稳定性,使柴油发电机组可靠稳定运行,既有利于提高系统电能质量,又可以提高经济效益。
在针对脉冲负载的研究中,文献[1]针对雷达电源设计了一种高效开关拓扑,使电源能够实现同步快速控制,具有较强的功率释放能力;文献[2]建立了含脉冲负载的综合电力系统,并通过仿真分析了影响系统稳态的因素。在改善电能质量问题的研究中,文献[3]设计了改善输出电能质量的滤波装置;文献[4]采用蓄电池加超级电容的储能补偿方案,以减小脉冲功率负载对柴油机发电机组供电系统的影响;文献[5]采用电动辅助机构增强柴油发电机组抗脉冲负载连续波动的方法,以减小转速调整率。但是这些方法都要增加额外的装置,无疑会增加系统体积和成本,改进调速系统控制算法则可以克服这两个缺点。文献[6]仿真验证了模糊自适应PID控制相较于常规PID在单个阶跃信号扰动下响应时间更短,但是并未讨论验证连续脉冲下的转速调节性能。
本文以柴油发电机带脉冲负载系统为研究对象,首先在Matlab的工具箱Simulink中搭建单台柴油发电机-整流器-脉冲负载(diesel generator-rectifier- pulsed load, DRP)仿真模型,然后介绍模糊控制在非线性控制中的优越性,针对传统PID调速系统调节性能差的问题,提出利用模糊PID控制器提高调速系统调节性能的方法。最后利用仿真对模糊PID和常规调速系统进行对比。仿真结果表明,模糊PID控制器控制下的带脉冲负载柴油发电机组具有更好的实时调节性能,输出的电能质量更高。
1 DRP系统
DRP系统主要由柴油机、调速系统、同步发电机、励磁系统、整流器及脉冲负载组成,调速系统和励磁系统分别控制柴油发电机组的转速和同步发电机的输出电压。柴油机给同步发电机提供机械转矩,同步发电机通过整流器整流向脉冲负载供电,实现系统的机电能量转换。DRP系统结构原理如图1所示。
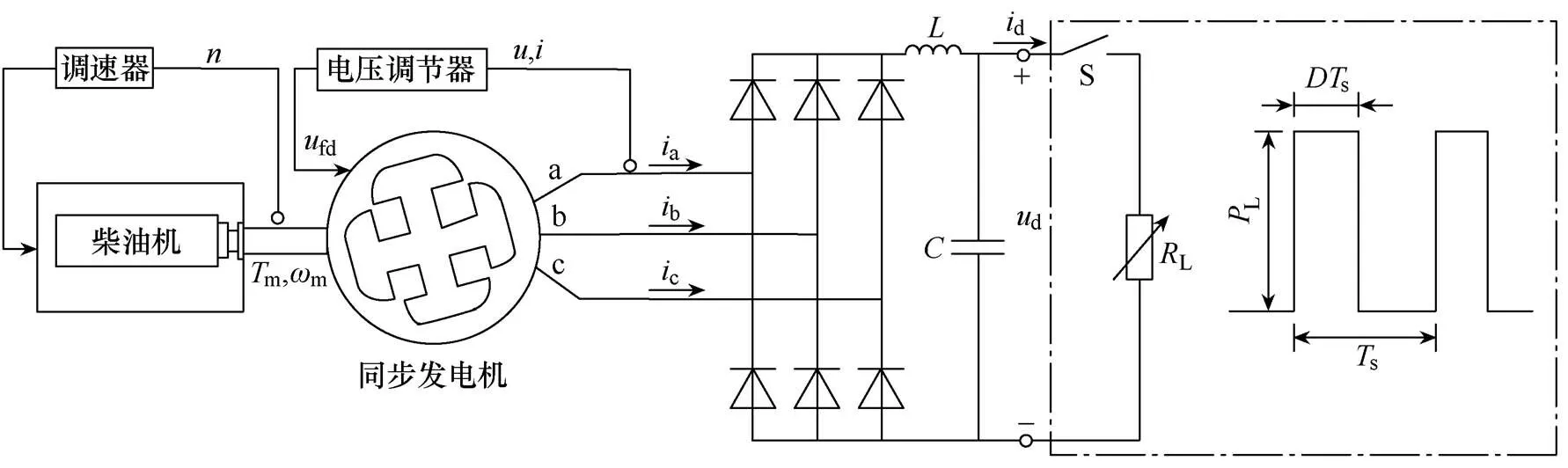
图1 DRP系统结构原理
在图1中,柴油发电机输出三相交流电经整流器可等效为直流电源为直流脉冲负载供电。随着直流侧开关S的频繁通断,脉冲负载实际消耗的功率并不均匀,而是呈现周期性脉动特征,脉冲负载的周期为s,主要由直流开关S的切换频率决定,脉冲负载的占空比为,主要由直流开关S的导通时间与脉冲周期决定,负载在s时间内的功率为脉冲负载的峰值功率L,通过改变电阻L的阻值大小和控制负载的端电压大小可以模拟不同脉冲负载的峰值功率。
1.1 柴油机调速系统模型
柴油机是原动机,提供动力来源,调速系统使柴油发电机能保持转速恒定,从而使输出的电能频率稳定。当负荷增大时,阻力矩变大,致使转速降低,调速器控制油门开度变大以增大供油量,提高机械转矩;当负荷减小时,阻力矩变小,致使转速升高,调速器控制油门开度变小以减小供油量,降低机械转矩[7-9]。柴油机及调速器的工作原理如图2所示。
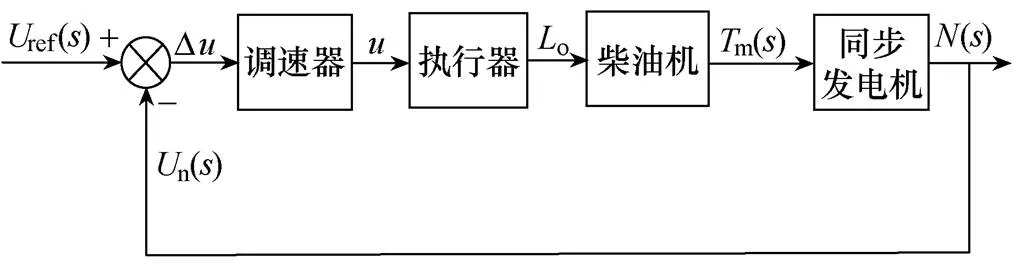
图2 柴油机及调速器工作原理
由图2可知,同步发电机的实际转速与给定转速之间的差值为转速调节器的输入量,输出信号控制油门执行器,油门执行机构通过调节油门信号位置o,调节进入汽缸的进油量,进而直接影响柴油机的输出功率,根据达朗贝尔原理,转轴的运动方程为
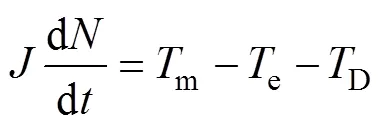
式中:为同步发电机的转动惯量大小;为转速;m为柴油机的机械转矩;e为同步发电机的电磁转矩;D为同步发电机的阻尼转矩。令r为阻力矩,则
在平衡时刻,机械转矩和阻力矩的初始值相等,即m0=r0。当负载功率变化后,阻力矩也会相应发生改变,为了满足系统的稳定运行,柴油机通过调速器调节进油量,使机械转矩满足电磁转矩的需求,进而维持系统平衡。负载变化时,假设柴油发电机的机械转矩增量为Dm,则有
机械转矩为转速和喷油量的函数,按照泰勒级数[10]展开可以得到

式中:i为喷油量;Di为喷油量增量。
根据无调速器柴油机的速度特性曲线,假设油门大小维持不变[11],则
式中:0为转速的初始值;1为常数,可根据柴油机手册查出。
当柴油机转速稳定时,机械转矩与喷油量的关系可从柴油机速度特性曲线中获得,即

式中,i0为柴油机初始油量大小。
根据文献[10]可以得到柴油机的简化数学模型为

以常规PID转速调节器为例,实际转速与给定转速的差作为控制器的输入,喷油量作为控制器的输出,则

式中:p、i和d分别为比例、积分和微分系数;为仿真步长。
综上,柴油发电机调速器的数学模型可以表示为

1.2 脉冲负载模型
柴油发电机组输出交流电经过三相桥式整流器为直流脉冲负载供电,本文建立的整流器后端包括滤波器的脉冲功率负载数学模型。三相不可控整流器及脉冲负载电路原理如图3所示。
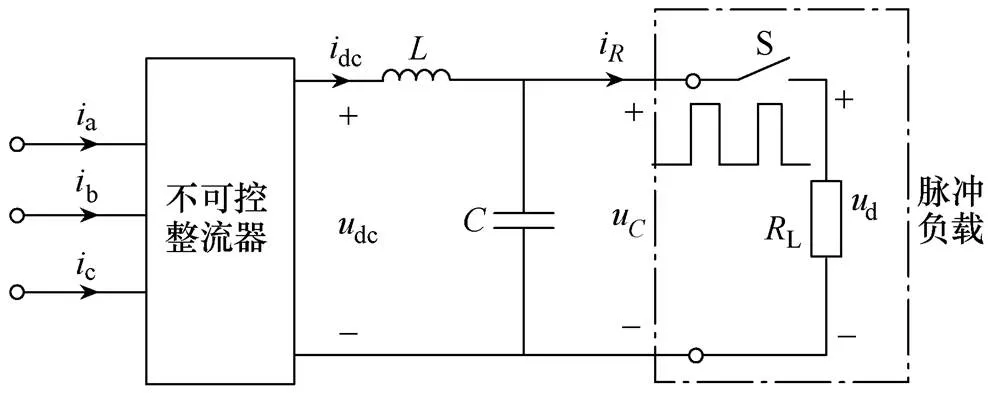
图3 三相不可控整流器及脉冲负载电路原理
图3中,同步发电机输出交流电经整流后输出电压为dc,当接入负载时,电感上的电流为dc,负载上的电流为,电压为d,滤波电容上的电压为。以雷达二次电源为代表的直流脉冲负载为例,脉冲负载的理想工作波形如图4所示。
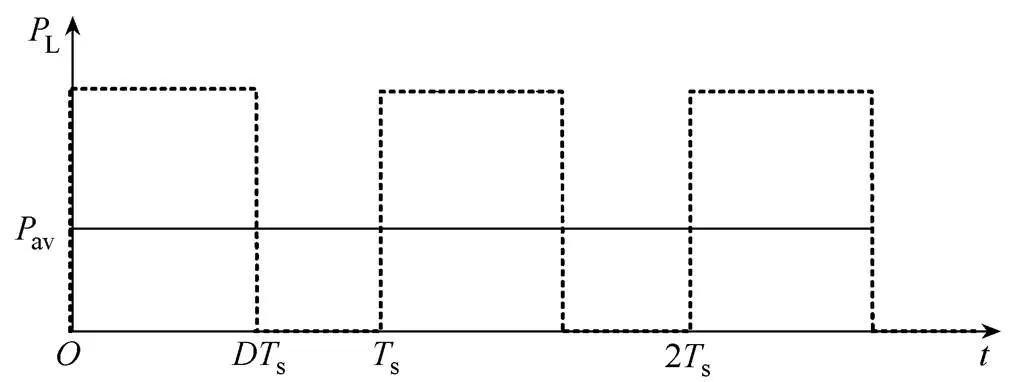
图4 脉冲负载的理想工作波形
图4中,s为脉冲负载工作周期,为占空比,L为脉冲负载瞬时功率,av为平均功率。直流开关S的开断可以将脉冲负载划分为两种状态,每种状态下电路的工作特性不同。直流可控开关导通状态代表脉冲负载处于工作状态,此时负载电流由负载功率决定;直流可控开关关断状态代表脉冲负载处于不工作状态,此时脉冲负载的负载电流为零(不考虑实际装备的其他常规负载)。按照这两种工作模式可以将脉冲负载分段描述出来,分别如图5和图6所示。

图5 开关S导通
根据KCL和KVL定理,当直流开关导通时,得到电路中的基本关系为
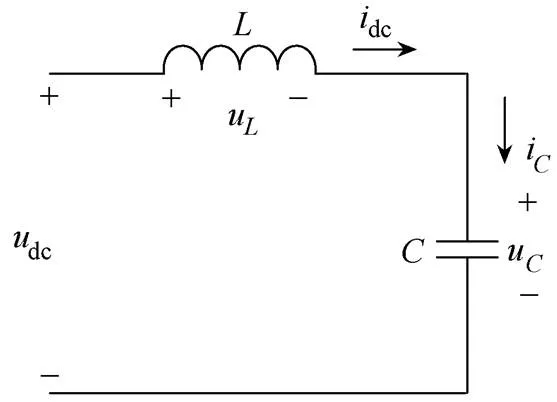
图6 开关S关断

根据KCL和KVL定理,当直流开关关断时,得到电路中的基本关系为

2 PID控制器
2.1 常规PID控制器
常规PID控制是一种同时将比例、积分和微分作用规律结合起来的控制器,关系式为

式中:为比例系数;i为积分时间;d为微分时间。
常规PID控制器在工作时,以比例环节为主,通过积分环节消除静态偏差,利用微分环节实现超前控制。其由于结构简单、稳定性好、工作可靠、调整方便的特性而成为一种普遍的控制方法,但是其控制参数并不能自动调整,一旦参数确定后只能应用于某个特定的条件下,而在实际工作中的脉冲负载属于典型的非线性负载,工作模式具有不确定性,因此仅靠常规PID控制不能达到较好的控制 效果。
2.2 模糊PID控制器
常规PID控制无法对其参数进行实时在线整定,可以通过与模糊控制相结合来实现。模糊PID控制框图如图7所示,本文采用2输入-3输出的模糊控制方法,将误差()和误差变化率c()作为模糊控制的输入变量,PID控制器的控制参数p、i、d的实时增量Δp、Δi、Δd作为输出变量,利用模糊控制规则对PID参数进行实时整定,以满足不同时刻的()和c()对PID参数自整定的要求[12-14]。因为误差()和误差变化率c()分别表征了系统的稳态和动态性能,所以模糊PID控制器可以做到两者同时兼顾。
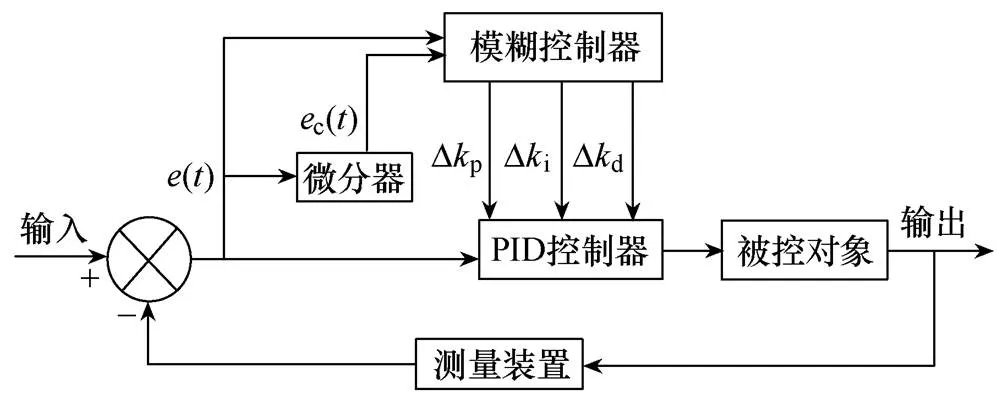
图7 模糊PID控制框图
图7中每一个输入和输出变量的隶属度函数分别包含七个模糊子集:负值最大(NB)、负值中度(NM)、负值最小(NS)、零(ZO)、正值最小(PS)、正值中度(PM)及正值最大(PB)。设定输入变量误差()和误差变化率c()的模糊论域为[-3, 3],输出变量Δp的模糊论域为[-0.3,0.3],Δi的模糊论域为[-0.06, 0.06],Δd的模糊论域为[-3, 3]。变量全部采用三角形隶属度函数。输入变量()和c()进入模糊控制器后,先被模糊化接口模块模糊化变换成一个以隶属度函数表示的模糊语言值,再依据知识库模块进行模糊推理,最后由解模糊接口模块转变成精确值输出,模糊控制器结构如图8所示。

图8 模糊控制器结构
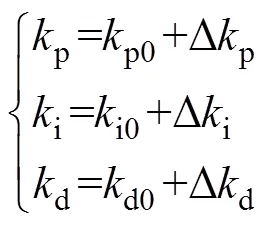
根据模糊规则表,选择适当的模糊化和去模糊化方法,可以对pid进行动态整定,设p0、i0、d0为常规PID的预定值,则模糊PID控制器的计算公式为
3 系统评价指标
脉冲负载的典型特点是功率变化幅度和频度大,相当于频繁的加载和卸载,对电源的输出影响远远大于常规负载的影响。在其正常工作范围内,当在一个固定工况时,系统中的各个变量经过一段时间调整后均可以达到动态平衡。文中以脉冲负载的峰值功率L为15kW,占空比为40%,开关周期s为40ms为例进行详细分析,两组仿真模型全都设定发电机的额定功率为30kW,输出频率为50Hz,线电压为400V,只有控制调速系统的控制器不同,进行在带脉冲负载条件下两种调速器性能的比较。为更好地分析两种控制方法的实际效果,对仿真结果进行量化,定义以下评价指标对实验结果进行分析。
3.1 直流侧
脉冲负载正常工作时,直流侧电压是最直接受到影响的电气量,直流电压的变化比较明显,因此可以通过直流侧电压的波动率反映脉冲负载对柴油发电机组供电系统的影响程度,直流电压波动率δ的计算方法为

式中:为采样时间内的开关周期数;o为采样时间内直流电压的平均值;max和min分别为第个开关周期内电压最大值和最小值。
转速波动率为

式中:max、min分别为第个采样时间内转速的最大值、最小值;av为采样时间内的频率平均值。
3.2 交流侧
根据文献[15]提出的平均幅度差补偿函数方法,计算采集信号的频率大小。基于该频率定义交流频率波动率为
式中:av为采样期间频率的平均值;为第个交流周期的频率。
相对偏差度指的是电压波形偏离正弦电压波形的程度,正弦波形的幅值、相位及频率和采样的波形一致,记为相对偏差率(relative deviation rate, RDR),则定义电压相对偏差率为
式中:为采样时间内的交流电压周波数;Dac()为第个交流电压周波与标称电压信号的偏差量;ref()为与第个交流电压周波对应的标称电压信号有效值。
4 仿真结果分析
仿真时采用控制变量法,即两组仿真模型除了调速系统的调速器不同以外,其他各个参数完全一致。各指标变化趋势及对比如图9所示。
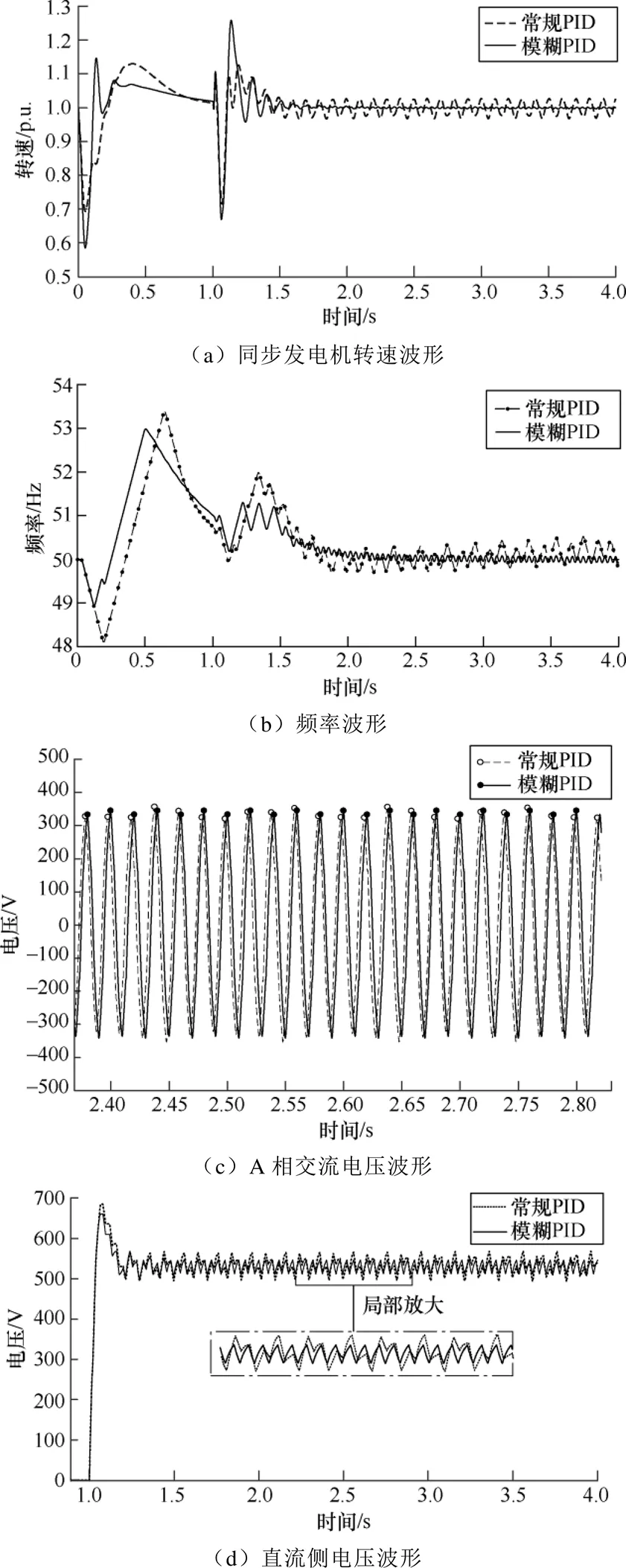
图9 各指标变化趋势及对比
图9(a)为常规PID和模糊PID控制下的转速对比,可以看出模糊PID控制的转速曲线响应速度更快,虽然在1.14s左右出现了较大的超调量,但此时发电机还属于起动状态,更关注的是系统稳定以后转速的变化趋势,明显看出模糊PID控制下的转速更加稳定,波动幅度更小。
图9(b)为常规PID和模糊PID控制下的频率对比,由于同步发电机的转速直接决定了输出电能的频率,因此频率波形对比图中体现的模糊PID控制下的频率比常规PID控制的波动范围更小、更加稳定,与转速对比图相互印证。
图9(c)为常规PID和模糊PID控制下A相交流电压的波形对比,且在每个波形的峰值处标识出来,可以明显看出来标识模糊PID控制下的波形点更接近一条直线,说明波形更加稳定。
图9(d)为两种不同控制下直流侧端电压的波形对比,仿真模型用三相不可控整流器对三相电压进行整流,因此三相交流电压的品质也决定了端电压的质量,从图中可以明显看出来模糊PID控制下的端电压波动更小,更加稳定。
两种控制的动态参数指标见表1。由表1可知,两种控制下的A相电压有效值基本相等,但是在模糊PID控制下的其他四项动态参数明显优于常规PID,主要体现在转速波动率和频率波动率。
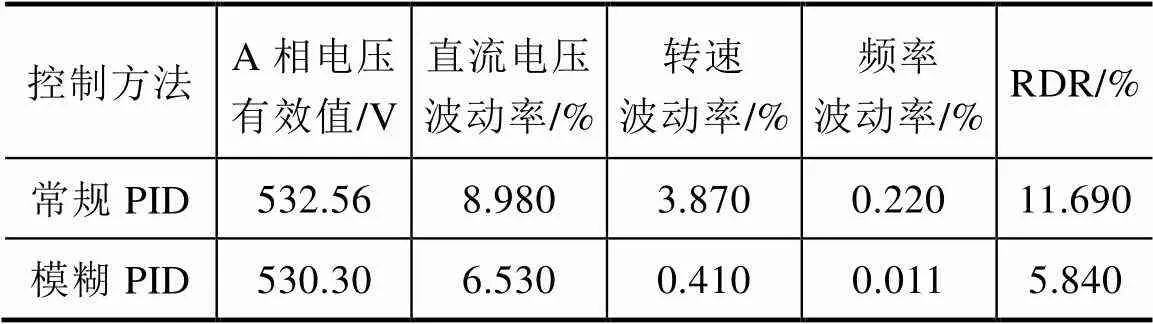
表1 两种控制的动态参数指标
5 结论
柴油发电机带脉冲负载工作时,对比两种控制方法,模糊PID调速器柴油发电机的转速调节效果要优于常规PID。当模糊PID控制使得柴油发电机的转速更加稳定后,三相电压相对偏差率和直流电压波动率等动态参数数值也变小,表明输出的电能质量得到明显改善。目前关于模糊PID控制仅限于理论研究和仿真实验,但是这给下一步的工程实际应用提供了重要参考。
[1] 赵皊, 唐登平, 陈善华. 同步控制的大功率机载相控阵雷达电源[J]. 现代雷达, 2006, 28(12): 126-128.
[2] 王勇, 刘金宁, 刘正春, 等. 有限容量系统感应电动机暂态特性研究[J]. 华北电力大学学报(自然科学版), 2016, 43(4): 42-46, 52.
[3] 谭亲跃. 大容量脉冲功率系统对电能质量的影响研究[D]. 武汉: 华中科技大学, 2011.
[4] 戴咏喜, 徐冲, 刘以建. 应用于脉冲负载的蓄电池和超级电容器混合储能的研究[J]. 通信电源技术, 2011, 28(4): 12-14.
[5] YUAN Liguo, ZENG Fanming, XING Guangxiao. Improvement and simulation study on turbocharged diesel generator set under pulsed load[C]//Inter- national Conference on Computer, Mechatronics, Control and Electronic Engineering (CMCE 2010), Changchun, 2010.
[6] 束长健, 曾洁, 邹娟, 等. 基于模糊自适应PID控制的柴油机调速模型仿真研究[J]. 铁道机车与动车, 2020(1): 9-12.
[7] 李保来, 兰建军. 带整流负载的同步发电机设计特点[J]. 防爆电机, 2005, 40(4): 4-8.
[8] 向守兵, 张文贵. 基于积分分离式PID控制的柴油发电机组调速器优化设计[J]. 制造业自动化, 2010, 32(5): 20-22.
[9] 况涪洪. 柴油发电机组数字式电子调速器设计与研究[D]. 哈尔滨: 哈尔滨工程大学, 2013.
[10] LIU Yancheng, WANG Chuan. Modeling and simu- lation on ship power station under large disturbance[J]. Advanced Materials Research, 2010, 121(3): 74-79.
[11] 王川. 负荷冲击型大扰动下船舶综合电网暂态电压稳定性研究[D]. 大连: 大连海事大学, 2012.
[12] 蒋华勤, 潘杰. 基于Matlab的参数模糊自整定PID控制器的设计与仿真[J]. 中原工学院学报, 2008, 19(6): 68-71.
[13] 王三武, 董金发. 基于MATLAB模糊自整定PID控制器的设计与仿真[J]. 机电工程技术, 2006(2): 67-70.
[14] 肖奇军, 李胜勇. 模糊自整定PID控制器设计以及MATLAB仿真分析[J]. 计算机仿真, 2005(9): 242-244.
[15] 侯朋飞. 柴油发电机组带脉冲负载稳定性及其补偿研究[D]. 南京: 中国人民解放军陆军工程大学, 2016.
Research on fuzzy-PID governor controlling diesel generator under pulsed load
ZHAO Zhikui1XU Ye1HUANG Kefeng1LI Xinpeng2
(1. Defence Engineering College, PLA Army Engineering University, Nanjing 210007;2. The 95928 Unit of PLA, Linyi, Shandong 276216)
In order to solve the power quality problems of diesel generator controlled by the conventional PID speed control system under pulsed load conditions, such as serious voltage waveform distortion and severe frequency fluctuations, by referring to the advantages of fuzzy control in nonlinear control, a method of using fuzzy-PID governor for controlling the speed governing system is proposed to improve the power quality of diesel generator. The fuzzy-PID control principle is analyzed. A simulation model of diesel generator with pulsed load in Matlab/Simulink is built, and comparative simulation experiments for the two speed control systems are conducted. The simulation results show that the fuzzy-PID speed control system has better real-time adjustment performance than the conventional PID speed control system under pulsed load conditions, and can better improve the power quality of the system.
diesel generator; pulsed load; fuzzy-PID control; modeling and simulation
2020-12-31
2021-02-02
赵志魁(1997—),男,硕士研究生,研究方向为新能源发电与智能微电网。