面向酿造工艺流程的智能机器人系统研究
2021-09-18何荣誉刁一峰
何荣誉,刁一峰
(湖南生物机电职业技术学院,湖南长沙,410126)
0 引言
上甄操作是整个酿造过程的关键环节,实践证明上甄操作的好坏直接影响酿造的质量。随着我国大数据技术的不断发展,尤其是人工机器人技术的发展,酿造工艺基本实现了自动化,但是唯独上甄环节还是以传统的人工操作完成。虽然通过熟练技师的操作可以提高上甄的操作质量,但是其不可避免存在人工劳动强度大、生产成本高以及工作效率低下的问题。其原因是因为在酿造过程中所产生的水蒸气等会影响上甄操作的质量,因此本文设计一种基于红外视觉系统,以此实现对酿造工艺上甄操作的智能化控制。
1 基于红外视觉检测技术上甑系统构建的原因
白酒行业的机械化经过近些年的发展,取得了显著的成绩。目前在酿酒生产线上除上甑蒸酒外,其他酿造生产工艺都已经实现机械化。究其原因是作为白酒酿造5 个A 级工序点的上甑工序,其操作复杂,要求苛刻,要实现自动化上甑困难重重。因此,目前国内上甑操作仍广泛采用人工上甑以及代替部分人工操作的半自动上甑[1]。为了满足白酒酿造企业发展的现实需求,研究并开发一种基于红外视觉检测技术的白酒酿造自动上甑系统很有必要。
2 面向酿造工艺流程的智能机器人系统设计
2.1 机器人模型的建立
本着机械设计适用性、经济性、可靠性等要求的前提下,采用现代计算机辅助设计,经过精确的逻辑和物理关系的计算,确定了机器人的结构关系,并运用 Slidworks 对其进行三维模型以及二维工程图的建立。(1)机器人本体设计。采用伺服电机带动立柱旋转并采用滚珠丝杆实现机械臂的上升,为了整体的稳定性的考虑,我们设计了 4 根立柱,3 根为了上升安装有丝杆,另外一根是为了起支撑作用。这样我们就得到了机器人的整体模型,并用Slidworks 软件建立了三维模型。(2)送料机构设计。在其内部安装有送料螺杆,通过绞龙电机的带动送料螺杆不间断的运动实现物料在机械臂内的传送,同时两个机械臂之间也是联通的,原料能够在两个机械臂中通过而不会泄露,机器人的前臂安装有一个进料口直接与送料传送带连接,保证了上甄的连续性。(3)撒料器的设计。采用扇叶的结构,设计了一个撒料器,使物料轻松均匀的进入甄桶,保证了上甄的质量。
2.2 上甄机器人的视觉控制系统
在机器视觉系统中,红外热成像技术是一种采用摄像机作为中心的图象收集组件,其能够采集物体表面的红外辐射,并能据此得到温度差异,继而得到我们需要的一系列图像信息。
2.3 图像处理
数字图像处理是一种把图象中的色彩、亮度等图象信号转变成可以用计算机分析的数字信息的过程。将摄像机采集到的原始图象进行数字化处理就得到了以像素为根本单元的数字图像,数字图像相较模拟图像其优点在于能够使用智能计算机和数字化电路进行储存和分析。在模拟图像转换成数字图像的过程中,首先将图像中的连续空间离散化得到图像的基本元素像素,各个像素的位置坐标、灰度值以及颜色值的信息都是整数值。一般来说,像素以二维整数组的光栅图像储存在数字计算机中,传输和储存时一般采用储存值的压缩格式。
图像处理有多种形式,一般来说这些处理是为了对图像进行数字化便于计算机进行分析,数字图像处理具体的流程图一般如图1。

图1 数字图像处理过程
2.4 基于matlab 的视觉图片处理
上甄机器人实际工作时红外摄像机拍摄得到的图片是一组甄桶内部料层的温度分布图,通过这些照片我们无法知道具体的补料位置。因此,需要对这些红外视觉照片进行相应的处理,通过提取图像高温的特征,可获得具体的漏气位置,从而控制机器人对相应位置进行补料。
3 基于视觉的上甄补料控制系统设计
3.1 机器人控制器的选择
目前工业机器人行业,控制器主要有单片机、基于 DPS 的运动控制器以及基于 PLC 的运动控制器等多种控制器。机器人控制器是机器人控制系统中的中心部分,它完成了系统由控制到本体的信号转换,促使机器人完成相应动作[2]。控制器是权衡机器人工作能力强弱的重要指标,也在某种程度上体现了机器人使用的方便程度,对机器人的发展有着极大的促进作用。控制器不仅要实现 PTP 控制(point to point control),同时还要实现 CP 控制(continuouspath control)。目前的三种运动控制器中,PLC 控制器所要求的硬件条件不是太苛刻硬件,不需要设计繁杂的电路板就可完成相应的功能。根据实际需要,我们采用美国罗克斯韦尔公司的 1769-L3ERM 控制器作为上甄机器人的控制设备。同时为机器人加入传送设备以及必要的照明设备以后,机器人就能正常的进行工作。
3.2 PLC 系统的设计
上甄布料流程图见图2 所示,控制装甄布料机械手的PLC 有以下输入信号:4 个启动、复位、急停和停止按钮,用于不同装甄操作方式的1 个手动/自动连续旋动开关,6 个分别用来检测底座和后臂伸缩、转动及其极限,2 个前臂上下限位信号,2 个前后壁送料螺杆变频警报,1 个左右锅切换按钮,3 个工序按钮,2 个送料螺杆堵料检测,以及相应的3个安全光栅,共24 个。
3.3 机器人控制系统的组成
通过以上设计和分析,我们最终得到了智能上甄机器人的控制系统,系统的控制中心采用工业计算机为控制中心,进行电机控制和开关量控制的主要控制元件采用 PLC 运动控制器,具体包括机器人本体控制、视觉系统控制、传输系统控制和其他附属系统的控制,如图2 所示。
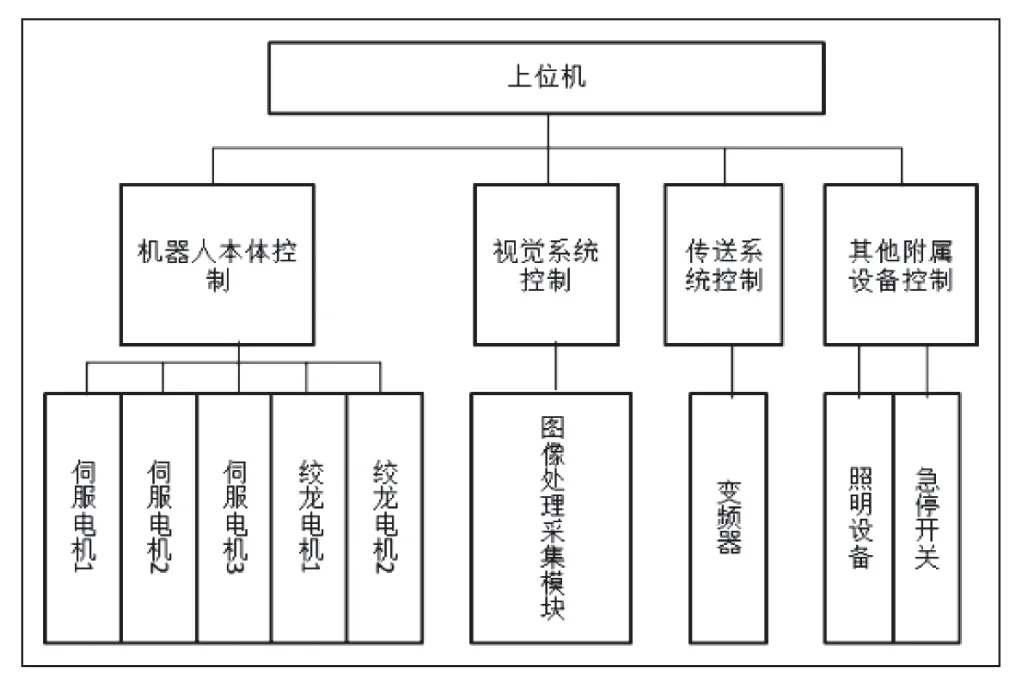
图2 机器人控制系统
机器人本体控制主要是通过 PLC 控制三个伺服电机以及两个绞龙电机,三个伺服电机控制实现机器人在铅垂面上的上下运动和水平面上机械臂的旋转运动,绞龙电机实现机械臂内部的螺旋搅拌器不断旋转输送物料。
视觉系统则由红外摄像机、图像采集处理模块以及上位机组成。高速摄像机与图像采集处理模块间,图像采集处理模块与上位机间分别采用脉冲通讯和以太网通讯。控制是图像采集的开关,其将采集到的图像进行相应的处理后进一步上传到上位机,相应的上位机将机器人的信息再返回给控制器。
传输系统主要是电机和一条传送带组成,控制器直接控制传送带上的伺服,当机器人工作时,电机得到控制器给出的驱动信号,从而驱动传送带运作。另外,为了实时掌握传送带的速度,我们在其上安装有编码器。
附属系统包括夜间工作照明、急停开关和状态指示灯等开关量的控制.
4 结论
视觉实验通过给予机器人料层漏气照片证明了机器人能够得到准确的漏气位置;酿酒实验通过比较机器人酿造的白酒和人工上甄得到的白酒验证了机器人在酿酒品质以及产量上都有着较好的表现。