百微米精度的单光子测距*
2021-09-17吴琛怡汪琳莉施皓天王煜蓉潘海峰李召辉吴光
吴琛怡 汪琳莉 施皓天 王煜蓉 潘海峰 李召辉 吴光
(华东师范大学, 精密光谱科学与技术国家重点实验室, 上海 200241)
本文发展了一种基于高精度单光子探测器的激光测距方法, 实现了百微米量级精度的非合作目标激光测距.单光子测距系统引入参考位置, 有效地抑制了系统延时漂移, 使光子飞行时间测量精度达到0.5 ps, 在2 m测距距离处, 单光子测距系统的测距精度达到65 µm@RMS.这项工作达到了当前脉冲飞行时间测距最高精度水平, 为远距离非合作目标高精度测距和成像提供了一种有效的技术.
1 引 言
单光子测距是基于单光子探测的飞行时间激光测距技术[1], 采用单光子探测器与时间相关单光子符合计数(time-correlated single-photon counting,TCSPC)技术[2−5], 可以达到单光子水平的量子极限灵敏度.另一方面, 单光子测距的测距精度取决于单光子探测器时间抖动和稳定度、回波光脉冲宽度和强度、计时器精度, 与传统的线性光电探测激光测距相比, 其受激光脉冲宽度和单光子探测器时间抖动影响较大.基于盖革雪崩光电二极管(avalanche photodiode, APD)的单光子探测器,量子效率高、尺寸小、室温工作, 是单光子测距中最为实用的探测器件[6−13].其中, 南京理工大学团队[14]通过使用两个探测器来抑制测距误差提高测距精度, 最终实现了3.6 mm的测距精度; 西安交通大学团队[15]通过增加距离选通等方法, 将连续测距残差控制到 ± 1.5 mm以内.这些基于APD单光子探测器的单光子测距精度处于毫米级水平[16−18],主要受限于测距系统的时间抖动及延时漂移.最近, 美国斯蒂文斯理工学院的团队[19,20]将测距拟合残差均值压缩至 ± 90 µm[19], 然而, 该实验采用单光子频率上转换技术[21,22], 将信号光探测抖动降低到约9 ps, 需要精确的同步门和复杂的上转换光学系统, 实用性较弱.
本文介绍一种高精度单光子测距技术, 采用实验室自主研制的低时间抖动的Si APD单光子探测器[23]、皮秒脉冲激光和高精度计时器以降低测距系统的时间抖动, 利用质心法拟合光子计数距离, 并且引入参考位置消除系统延时漂移, 在2 m测距距离处, 非合作目标的单光子测距精度达到65 µm@RMS.
2 单光子测距系统
单光子测距系统采用钛宝石皮秒脉冲激光器作为光源, 激光中心波长为800 nm、脉冲宽度为9 ps、脉冲重复频率为1 MHz.如图1所示, 输出激光经过分束镜BS1分束, 80%光照射到高速PIN探测器, 产生激光器同步信号.为了获得高时间精度, 剩余20%光通过分束镜BS2分束, 50%照射到待测目标表面, 50%照射到反射镜R2作为参考端, 两路光的回波经过合束, 通过透镜聚焦到单光子探测器靶面.通过调节衰减片1和衰减片2,使参考端与测量端两路信号均处于单光子水平, 系统采用实验室自主研制的高精度Si APD单光子探测器探测回波光信号, 然后通过分辨率为1 ps的高精度计时器(HydraHarp400)采集.为了验证单光子测距系统的精度, 我们在目标背面安装角反射器, 采用激光干涉仪(SJ6000)监测目标的位移量, 该激光干涉仪的位移分辨率为1 nm, 精度达到0.5 × 10–6.
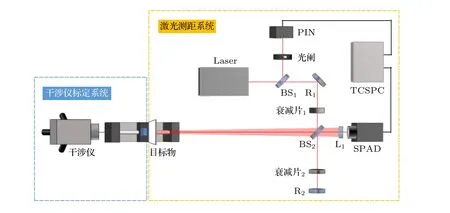
图1 单光子测距系统.L1: 聚焦透镜; R1, R2: 反射镜; BS1, BS2: 分束镜; PIN: 高速光电探测器; TCSPS: 时间相关单光子符合计数器Fig.1.Single-photon ranging system.L1: focusing lens; R1, R2: mirror; BS1, BS2: beam splitter; PIN: high-speed photodetector;TCSPS: time- correlated single-photon counter.
2.1 低时间抖动单光子测距系统
影响单光子测距精度的主要因素有系统时间抖动和回波信号强度[24−27], 系统时间抖动由三部分构成: 回波光脉冲宽度(tpulse)、计时器时间抖动(tTCSPC)和单光子探测器时间抖动(tSPAD), 满足如下关系:

系统采用激光脉宽为9 ps的钛宝石皮秒激光器,中心波长为800 nm; 实验室研制的低抖动Si APD单光子探测器, 时间抖动50—70 ps; 高精度计时器, 时间抖动约23 ps, 这些时间抖动参数均为全幅半高宽(full width at half maximum, FWHM).为了降低光强变化引起的延时游动[28], 需要将回波率(包括参考光和信号光)控制在0.15以内, 测试得到单光子测距系统的时间抖动为70.0 ps@FWHM(如图2所示), 对应时间精度为30.0 ps@RMS, 为高精度单光子测距提供了硬件基础.
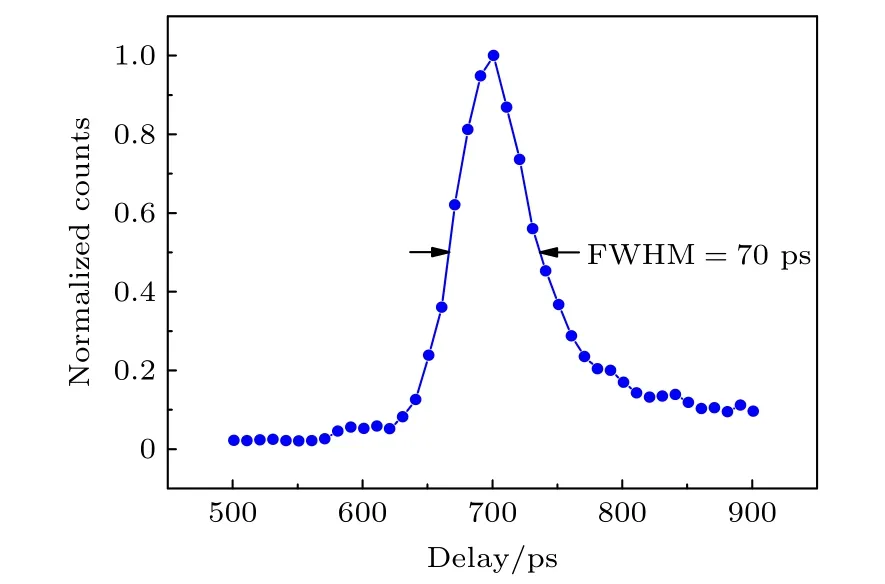
图2 测距系统时间抖动Fig.2.Time jitter of the ranging system.
2.2 高稳定高精度光子飞行时间测量
单光子测距采用飞行时间测距方法, 通过测量激光脉冲往返飞行时间t, 可得到目标距离系统的距离L = ct/2, 其中c为光速.通常将回波光子与主波信号的时间间隔(t)作为光子的往返飞行时间[29].该时间间隔包括测距目标位置回波光子实际飞行时间tFT、测距系统自身存在的延时tS和系统延时的漂移量 tD, 关系式表达为: t =tFT+tS+tD.由于延时漂移量的不确定性, 导致固定位置测距稳定性受影响, 从而影响测距精度, 因此抑制延时漂移是提高测距精度的关键.延时漂移有2个主要因素: 1) 光子数波动, 当入射光脉冲为多光子, 延时随回波率变化而发生漂移, 同时导致系统时间抖动变大[28], 由于回波强度随机波动, 使得这部分延时漂移很难事先补偿, 因此将回波光衰减至平均光子数远小于1光子/脉冲, 避免引起延时漂移; 2) 环境温度变化, 当单光子探测器处于环境温度变化范围大的工作状况下, 对温度敏感的APD器件的雪崩点会随工作温度的变化而变化, 继而导致延时漂移量 tD发生变化.而且, 单光子探测器的探测电路也会受到工作温度的影响, 导致延时发生漂移.针对温度变化引起的延时漂移, 我们开展了深入的补偿技术研究[23], 对于APD雪崩点变化所造成的延时漂移采用半导体制冷使其工作在恒定的温度改善漂移情况, 并建立探测电路延时随工作温度的变化关系, 微调APD直流偏置电压来实现延时漂移补偿.
然而, 当前的温度补偿技术在复杂温度变化环境中无法准确补偿延时漂移.本文引入参考臂, 获得闭环且绝对稳定的延时补偿.实验中, 将单光子探测器计数率控制在0.1左右, 避免多光子脉冲.单光子探测器可以同时采集两个位置的距离信息,计时器获得两个计数峰, 分别对应参考位置和目标位置, 二者之间的相对时间差 t =tFT−tFR, 表示目标位置和参考位置的相对距离, 具体关系如图3(a)所示.为验证参考位置对延时漂移的补偿作用, 采集时间长度为3924 s的延时数据, 得到对应目标位置和参考位置的延时-时间图象, 如图3(b)和图3(c)所示.从图3(b), (c)中可以看到两者的延时漂移量均为 ± 4 ps, 并且因为两路信号共享单光子探测器和计时器, 延时漂移走势几乎一致, 所以相对时间差t可有效地消除这部分延时漂移.如图3(d)所示, 相对时间差t可将延时漂移补偿到± 0.7 ps.
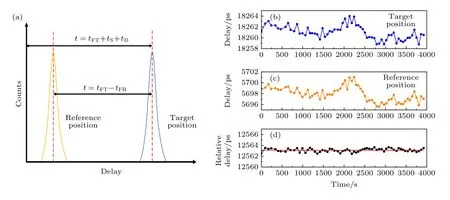
图3 (a) 有无参考物测距系统在TCSPC中的数据示意图; (b) 固定状态下目标位置延时-时间图象; (c) 固定状态下参考位置延时-时间图象; (d) 固定状态下相对时间差-时间图象Fig.3.(a) Data schematic diagram of ranging system with or without reference in TCSPC; (b) delay-time image of target position in fixed state; (c) delay-time image of reference position in fixed state; (d) relative delay-time image in fixed state.
2.3 光子计数测距数据处理
单光子测距采集到的光子计数数据如图4所示, 横坐标为光子到达时刻, 纵坐标为对应各时刻下光子计数归一化结果.光子计数通常有峰值法和质心法两种处理方法计算距离.其中, 峰值法方便快捷, 但是精度受计时器分辨率限制较大.所以,采用质心法通过权衡位置数据的权重, 得到比1 ps分辨率更精确的位置信息.计时器采集得到的各延时对应光子计数的数据, 延时数据记为X=(x1,x2,···,xn) , 对应光子计数记为Y=(y1,y2,···,yn), 则可计算质心位置为
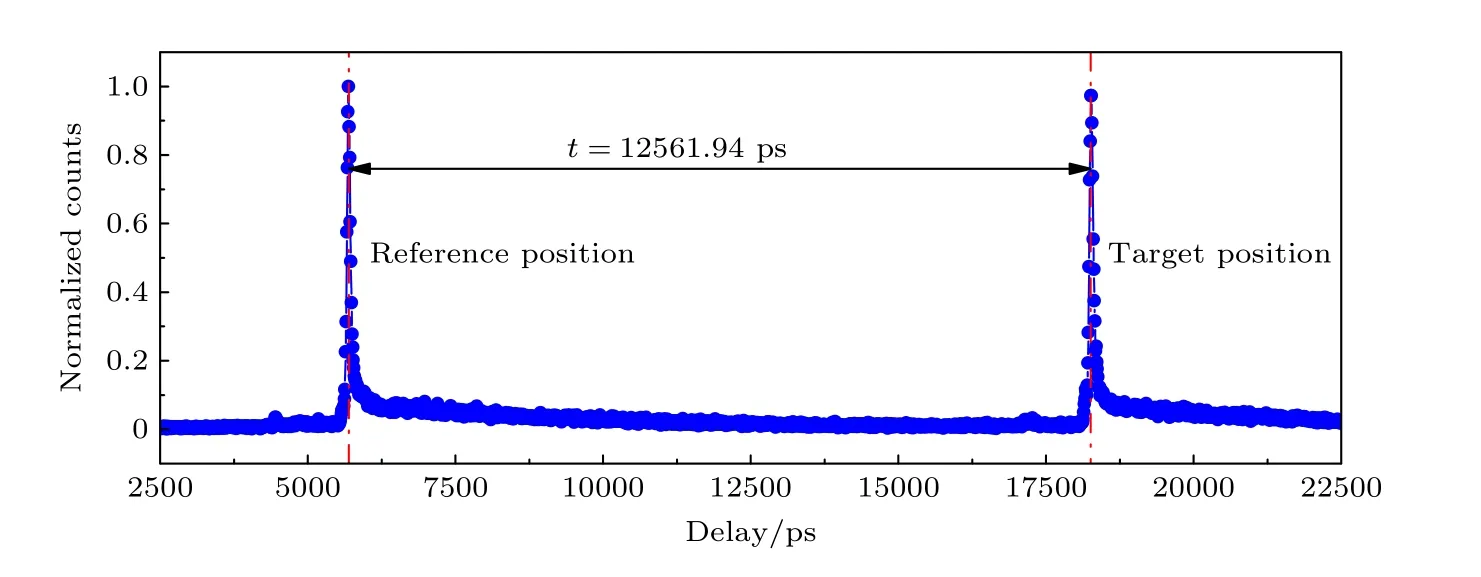
图4 某固定位置下参考位置与目标位置的光子计数-延时关系Fig.4.Photon-delay number relationship between reference position and target position in a fixed position.
针对两个计数峰, 首先粗寻两个峰值位置, 然后设置峰值位置左右400 ps选取数据, 分别采用质心法处理, 最终得到两个位置的距离信息.
3 单光子测距实验
3.1 单光子测距的时间精度
单光子测距系统的积分时间会影响其探测精度, 固定单光子探测器计数率为0.15, 采集100 s的长积分时间的光子计数测距数据, 然后根据不同积分时间提取数据, 对不同积分的多次测试的结果计算精度(RMS), 得到了其固定位置距离测试的RMS和积分时间的关系, 如图5所示.
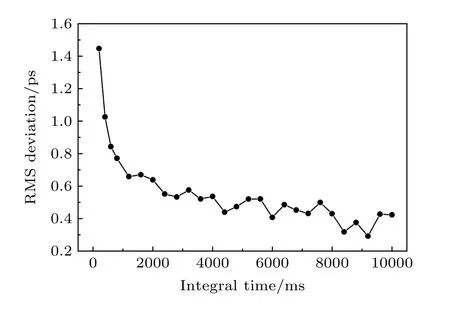
图5 不同积分时间对应的时间精度Fig.5.Time accuracy corresponding to different integration times.
由图5可见, 当积分时间大于等于3 s时, 单光子测距结果达到了稳定状态.因此, 选择3 s作为每个位置的数据采集时间, 单光子测距系统的时间精度达到0.5 ps.
3.2 单光子测距实验
采用连续变化目标位置, 获得单光子测距结果与激光干涉仪测量结果的比对.利用步进式电机设定目标每次移动的步长为0.075 mm, 在目标物后侧增加了激光干涉仪测距系统.目标每移动一段距离, 激光干涉仪采集其移动的位移量, 用于评定单光子测距精度.实验中, 目标物共移动了39次, 干涉仪所测总位移量为2.9248 mm, 得到了共40个位置的距离信息.测试结果如图6所示, 图中横坐标为干涉仪所测位移量, 纵坐标为单光子探测器所测距离, 黑色点为40个位置上两者的对应关系;红色线段为对40个数据点进行线性拟合得到的测试距离与干涉仪位移的关系, 表达式为y = 1.13x +0.056 mm, 斜率不为1是因为单光子测距系统和激光干涉仪测量系统光路并非完全平行; 蓝色折线对应每个位置的距离拟合残差, 记为D=(D1,D2,···,D40), 可以看到40个位置的残差小于 ± 0.15 mm.本文通过计算拟合残差D的RMS来判定测距精度[16−18], 计算公式为
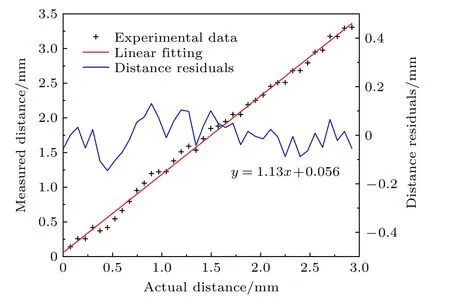
图6 单光子测距值与激光干涉仪位移测量值比较Fig.6.Comparison of the single-photon ranging and the displacement measurement of the laser interferometer.
得到所测拟合残差的精度为65 µm@ RMS, 单光子测距精度进入百微米量级.
4 结 论
本文介绍了一种高精度单光子测距技术, 通过设置参考位置, 消除单光子探测器和计时器的延时漂移对测距精度的影响, 并且采用质心法对光子计数进行拟合得到峰值位置, 实现0.5 ps的延时测量精度.经过激光干涉仪标定, 在2 m测距距离处,非合作目标的单光子测距系统的测距精度达到65 µm@RMS, 使基于光脉冲飞行时间测距的测量精度进入百微米量级.
