基于消毒机器人设计与方法的研究
2021-09-17张瑜王新斌唐倩李慧
张瑜,王新斌,唐倩,李慧
(天津中德应用技术大学,天津,300450)
0 前言
近年来,我国对于公共卫生领域的消毒工作,标准逐渐严格,尤其对于餐饮行业、酒店以及公共交通等领域都提高了标准,在新冠状病毒发现后,我国卫生有志人士发明了多种消毒机器人,但是大多数机器人属于喷雾型机器人,为了做到大面积消毒以及消毒的高效性,大范围喷洒高浓度消毒剂以达到消毒杀菌作用,但其必须有专人负责补充消毒液,监管机器人进行充电,在实际的人员操作过程中也有一定的感染病毒风险,目前市场上有很多机器人在只能在特定场所应用做不到良好的通用性。比如博物馆、装配木地板写字楼,通风不良的走廊等,因为消毒液具有一定腐蚀成分,并且有浓烈的刺激性气味,对于不耐腐蚀性地面,气味敏感人群都会造成损伤。紫外线消毒是一个良好的解决方案,但是市场上大多数紫外线消毒机器人具有一些统一的短板,比如不能进行定向消毒,紫外线照射过程中产生的臭氧对动植物也会造成危害,不能合理的控制空间中臭氧的含量,多场合适用性依旧不是很广,长时间紫外线照射会造成植物的死亡,且机器人大多数不能进行全地形移动,像楼梯、不平整地面等移动起来十分困难。为了解决上述问题,使机器人拥有好的通用性,移动能力、紫外线定向消毒,有臭氧无臭氧紫外线灯协同工作严格控制空间中的臭氧浓度,无需人工管理就可进行7×24小时消毒,对于我国应对突发公共卫生事件,日常消毒工作的应急处置和应急保障能力和工作效率需求迫在眉睫[1]。
1 方舱消毒机器人设计
为了满足消毒机器人在全场景都可以达到有效、安全、高效、无需人工监管持续消毒的卫生工作,因此,采用消毒机器人搭配方舱技术的解决方案对消毒机器人进行设计优化。消毒机器人整体部分采用六足仿生机器人,为了达到步态平稳采用三角步态[2],机器人主体主要包括六足机器人底部结构由驱动连接板,液压传动杆,视觉识别结构,机械臂伸缩杆,定向紫外线射灯结构,电池仓,电磁铁,滚轮等三十四部分组成,如图1如示。
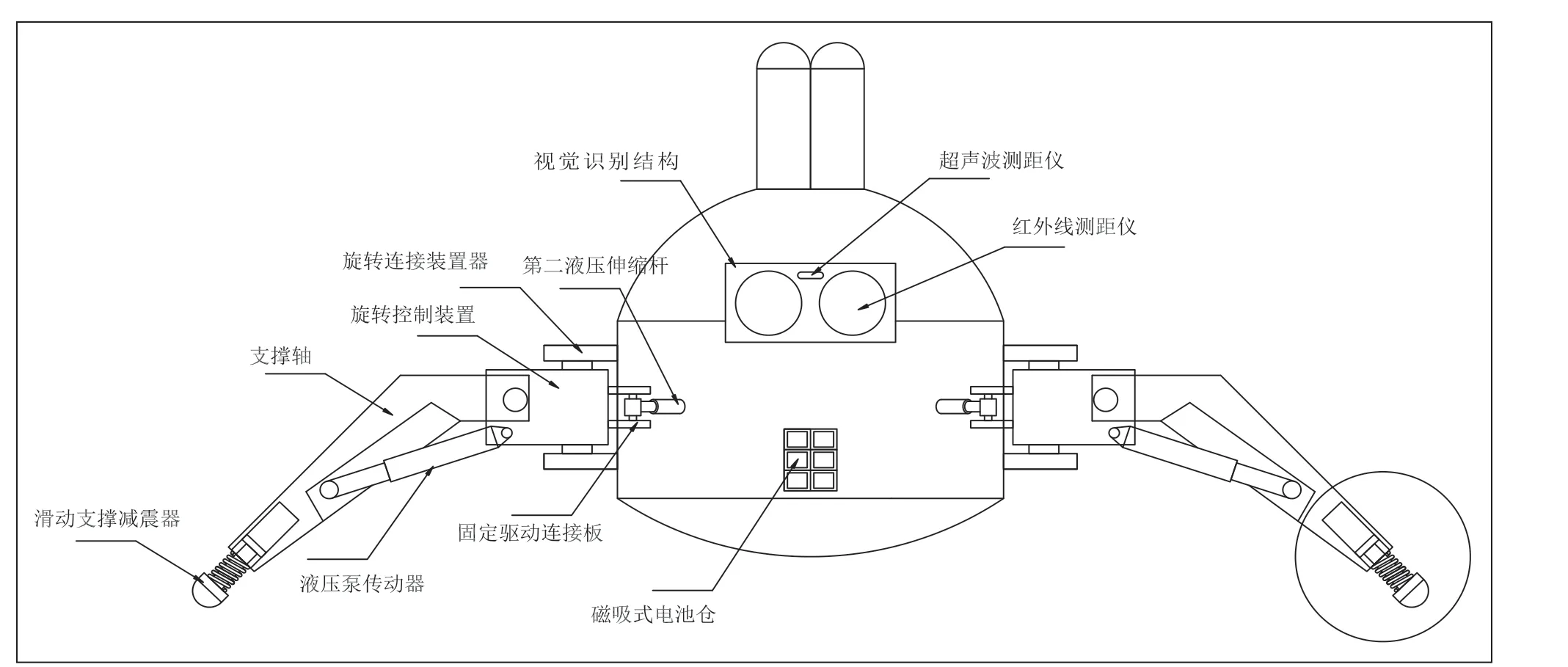
图1 机器人主体结构
(1)消毒机器人本体上端,安装有多个不同波长大功率紫外线灯管,可以对于大范围空间区域进行消毒杀菌,满足大区域消毒工作,并且为了减轻重量和成本外侧底部设有钢化塑料底座,同时为了使机器人灵活移动内部通过旋转轴设有六足结构,六足结构表面设有驱动连接版,通过旋转轴的第一液压传动杆,它的另一端连接设置于机器人本体表面,并且在机器人本体表面定装了视觉识别结构,其主要有两个摄像头一个超声波测距器组成,如需特殊场景还可以进行扩展传感器的添加,两个摄像头中一个是视觉识别摄像头用来监测机器人前方物体,使用FasterR-CNN 中的altopt算法进行检测可以正确有效的识别出数据集中的物品,更加方便的做定制[3]。另一个是测距摄像头并且拥有红外线感知和补光灯,保证在光线昏暗的情况下,摄像头依旧可以捕获清晰物体。为了达到定向紫外线光照消毒机器人表面的机械臂底座,连接机械臂是由驱动电机以及伸缩杆组成,在机械臂顶端有一个定向紫外线灯,其采用不同波长紫外灯结合高反射阳极氧化铝组成使之可以定向消毒杀菌,在实际消毒工作中,当消毒机器人的摄像头识别到植物、动物、或者紫外线敏感物体时,使用机械臂对其进行消毒卫生工作,在保证消毒效率的同时也避免紫外线敏感物体受到伤害,机器人内部设有电池仓其中共6个电池组,内部的磁极装置中间连接一个弹簧磁吸式连接头,用来吸附连接电池进行供电,电磁铁和液压杆相配合控制电池盖的开合,做到自动连接、断开电池。
(2)为了保证机器人的重量轻便性,和更久的续航能力,机器人底盘采用钢化塑料结构,在机器人进行移动工作时耗能更小,支撑足安装块钳状连接杆通过旋转轴与支撑足安装块旋转连接,支撑足安装块与行走足固定连接,如图2所示。

图2 行走足结构
(3)行走足为了达到更好的避震效果内侧通过旋转杆进行链接,第二液压传动杆的一端通过旋转轴链接于支撑足,在内滑槽内部有减震滑动支撑杆,同时为了达到更好地抓地能力底端固定设有半圆形橡胶头来增加机器人的抓地能力和摩擦力,并且橡胶头可以进行转动并且在底部有一个滑轮,在平整地面移动时可以使用滑轮移动,减少耗电量,增加电池的续航能力。
(4)当传感器检测到路径以及虚拟墙时,会把数据信息传送到图像处理系统中在云端进行计算并且发送给机器人执行指令,视觉识别结构表面固定补光灯和红外线感知定焦摄像头,如果机器人在运行过程中发现看不清前方物体或者黑夜情况下,补光灯打开进行补光,保证摄像头可以看到清晰物体结构以便提高识别度。
(5)在机器人电量不足时,消毒机器人搜索最近的充电仓规划路线并前往充电仓进行充电,进入充电仓指定位置,机器人开启电池仓盖,断开机器人内部磁吸式接电器,弹簧伸缩装置弹出电池,方舱中电池牵引带磁极通电,磁吸电池,牵引带牵引至电池存放区充电时,新电池由第二牵引带牵引到机器人电池仓接口处,弹性伸缩装置将电池送入机器人电池仓,机器人电池仓第一磁极通电连接,液压升缩杆控制电池盒盖关闭,第二次磁极通电完成电池更换,如图3所示。

图3 方舱(充电仓结构)主体结构
2 使用效果
多波长紫外线灯管能够对大范围区域进行消毒杀菌[4],死角区域,可通过机械臂底座上的驱动电机驱动机械臂伸缩杆旋转调整方向,在不同场景中都可以用传感器获得的现场数据来调控机器人的消毒方式,真正的做到了良好的通用性,在视觉摄像头部分,采用传感器与双摄像头融合的方式进行数据的采集,定焦变焦摄像头相互协作,红外线测距仪,超声波传感器,可以精准的定位空间位置,合理的规划消毒机器人前进路径,高效的识别算法可以让物体识别度更加精准,在特殊环境下也可以想要使用也可以人工采集数据建立模型,使之可以应对各种复杂的消毒场景,底部重组的六足结构,给机器人移动提供了更多的可能性,不论是攀爬楼梯,还是平整的地面都可以进行稳定,快速的移动,方舱技术与消毒机器人进行耦合,使机器人续航问题得到了解决,从传统的给电池充电到直接更换充满电的电池可以让机器人无需等待,持续工作[5]。
3 结束语
综上所述,目前机器人领域不断向智能化,数字化转型,虽然说能够携带高效的消毒剂进入需要消毒场景进行消毒可能对于病原体来说更加的直接有效,但是这种消毒方法很难在日常环境之中使用,因为会对人体产生二次伤害,如何通过最新技术解决当下难题是每一个研究人员长久的思考,通过以上设计改进传统消毒机器人,多传感器、神经网络、机器学习的融合移动消毒机器人做到更加便利化、智能化、专业化。随着中国自主研发能力的提升,消毒机器人将朝着数字化、网络化、微型化、轻柔化的方向发展[6]。
