无人船搭载声呐设备在大岗山水下检测中的试验应用
2021-09-15彭涛,黄会宝,高志良,江德军
彭 涛, 黄 会 宝, 高 志 良, 江 德 军
(国能大渡河流域水电开发有限公司,四川 成都 610041)
1 概 述
大岗山水电站位于大渡河干流的中游,电站枢纽主要由拦河混凝土双曲拱坝、泄洪消能建筑物、引水发电建筑物等组成,最大坝高210.0 m,电站装机容量2 600 MW。大岗山水库平面呈条带状,为河道型水库,水库正常蓄水位1 130 m时,坝前最大天然壅水深度约120 m。大岗山库区属于大渡河中游产沙区,坝址河段多年平均悬移质年输沙量2430万t(其中泸定水文站-大岗山坝址区间的多年平均悬移质输沙量约1428万t),多年平均含沙量0.773 kg/m3,输沙量主要集中在汛期(6~9月),汛期多年平均悬移质输沙量2 200万t,占全年输沙量的90.5%,汛期平均含沙量1.120 kg/m3。该河段多年平均推移质年输沙量为32.4万t。作为大渡河干流的水电站,了解蓄水初期水库泥沙淤积情况对指导水库运行十分重要,该测量工作积极按照大渡河公司智慧企业建设目标,改进了适应高山峡谷地区水库的无人船测量系统,在大岗山坝前水下地形测量试验,实现了水下地形的自动化数据采集和航行,有效提高了作业效率,减少了测量人员的涉水风险。
2 无人船测量系统
2.1 系统组成
无人船搭载声呐设备测量系统不仅能够解决高山峡谷区域人员作业高风险的难题,还能安全开展紧急情况大坝及边坡的水下测量,为大坝运行性态提供可靠数据支撑。测量船系统主要由船体、动力系统、船载主控系统、设备供电系统、声呐系统、船体和测深设备导航定位系统、无线传输系统等组成。
2.1.1 船体选型及设计
考虑船体内需布置发电机、电池、多波束等设施设备,经统计计算,船体满载情况总重约300 kg(包含船身),经多次选型比较,最终确定设计无人船排水量为450 kg,船体长度3 m,宽度1.45 m,整体采用全铝材料焊接,相对重量较轻。船体和多波束设备设计建模及实物见图1。

图1 船体搭载多波束设备设计建模图及实物图
2.1.2 动力系统及设备供电系统
多波束设备在使用过程中对运行环境具有一定要求,在稳定,平稳的环境中可以得到高质量的数据,因此,在动力方面使用了水下电动机直驱螺旋桨推动船体前进。为提高灵活性,采用矢量控制转向。以电机为动力的驱动在控制方面相对准确容易,只需要向电动机调速器发送相应PWM信号,即可调节电机转速,控制输出功率,达到船速的控制。该无人船为推力系统配置了三元锂电池为电机提供动力电源。由于库区长、范围广,无人船需要具备长距离航行能力,如果单纯使用电池驱动,那么,整个船体将装载大量电池,使船体重量直线上升,会让拆装,运输,船体下水变得困难。鉴于纯电动驱动需要在使用前对电池进行充电,充电时间和充电附属设施庞大。从以上性能及使用便捷性考虑,决定采用混合动力系统,即发电机发电给电池充电,电池直接驱动电机,一边使用一边充电,即具有良好的控制性能,又可以实现长距离航行。同时,拆装维护,运输下水,都由于质量变轻和模块化的设计而变得便捷。
2.1.3 船载主控系统
无人船需要实现自动驾驶、自动避障、自动导航等功能,是实现无人船测量系统的关键技术。船载主控系统采用GNSS卫星导航和捷联惯导的组合导航系统。本系统采用已广泛应用到复杂系统设计的分级递阶控制系统结构,将控制系统分为组织级、协调级和执行级,并保证系统的强鲁棒性和容错性。以单片机作为控制器,各传感器反馈构成多元闭环控制系统。本次试验为简化无人船的制造过程,采用了水下动力矢量控制方式,该方式在船的控制中具有很高的灵活性,但在控制方面的难度也是最大的,经过多次测试,调整好相关的PID参数和其余控制参数后,无人船能准确地按规划航线行驶,以1.7 m/s的速度压线航行,偏离度不超过0.5 m。
2.1.4 声呐系统
声呐系统主要包含Teledyne Reson T20P超高分辨率多波束、Reson SVP-70表面声速仪、PosMV SurfMaster船载定位定姿系统、PDS多波束实时数据采集后处理软件及Valeport MiniSVP剖面声速仪。多波束测深系统是一种多传感器的复杂组合系统,是现代信号处理技术、高性能计算机技术、高分辨显示技术、高精度导航定位技术、数字化传感器技术及其他相关高新技术等多种技术的高度集成载有多波束测深系统的船,每发射一个声脉冲,不仅可以获得船下方的垂直深度,而且可以同时获得与船的航迹相垂直的面内的多个水深值,一次测量即可覆盖一个宽扇面;与单波束回声测深仪相比,多波束测深系统具有测量范围大、测量速度快、精度和效率高的优点。
2.1.5 通信链路系统
根据无人船实际搭载多波束设备的情况,该船通信链路系统可以分为三大部分,第一部分是船载主控系统数据链路,第二部分是多波束远程操作链路,第三部分是多波束系统定位差分链路。无人测量船运行环境为高山峡谷区域,大山会阻挡无线信号,但无人船的控制及航行情况需要时时监控,鉴于测区移动信号基本覆盖的情况下,无人船主控系统链路数据使用2G-4G通信,以保障长距离通信,同时还搭载了一套900 MHz的数传电台作为无人船的双路冗余通讯系统,在无2G信号的地方电台作为备份使用。多波束远程操作链路由于数据承载量大,故采用高带宽的通信设备来承担,使用内建网络,直接连接无人船上多波束控制电脑,由岸上人员直接同屏远程操作。导航差分链路由于其数据量小,使用的是大功率远程433 MHz频率无线电台通信,以满足在大山区远距离通信(基站位置合理的情况下可达5 km)。
2.2 测量系统的原理
无人船测量系统是整个无人船系统的核心,承担着水深测量和导航定位任务。多波束测深系统是利用发射换能器阵列向水底发射宽扇区覆盖的声波,利用接收换能器阵列对声波进行窄波束接收,通过发射、接收扇区指向的正交性形成对水底地形的照射脚印,对这些脚印进行恰当的处理,一次探测就能给出与航向垂直的垂面内上百个甚至更多的水底被测点的水深值,从而能够精确、快速地测出沿航线一定宽度内水下目标的大小、形状和高低变化,比较可靠地描绘出水底地形的三维特征。因此,多波束测深系统把测深技术从点、线扩展到面,并进一步发展到立体测深和自动成图,适合进行大面积的水底地形探测。基本测量原理及多波束系统链接见图2。

图2 无人船测量原理及多波束系统链接图
3 大岗山水电站坝前水下地形测量应用
3.1 测区现状
大岗山水库蓄水后,入库泥沙将在库内落淤,淤积三角洲到达坝前或田湾河引水泥沙在坝前淤积后,在取水和泄流过程中,泥沙或沙石粒被水流带动,其势能和动能造成水工建筑物混凝土破坏和磨损,影响到取水口前各泄水建筑物的安全运行。大岗山坝前至泄洪洞进口区域处于河道转弯处,测区最大水深大于200 m,水面宽度在350~430 m之间,测区范围边坡存在多处不同程度的垮塌,传统测量作业方式存在较大安全隐患,因此,采用无人船搭载声呐设备在大岗山坝前开展作业,测区范围见图3。

图3 大岗山坝前测量区域示意图
3.2 施测过程
采用无人船搭载多波束水下测量系统对泄洪洞进口至坝前库段开展水下测量,主要沿水流方向布设计划测线,以平行于等深线为大体原则布设测线,对泄洪洞进口至坝前库段水下地形进行探测。无人船现场沿计划测线自动行驶,直到采集到的数据完全覆盖住测区为止。测线布置见图4。

图4 泄洪洞进口至坝前库段测线布置图
大岗山水电站处于高山峡谷区域,卫星信号易被山坡遮挡,为确保多波束接收到准确的GPS定位信号,需将RTK基准站架设在坡度相对较缓、高度较高的位置,且选择在卫星信号较好的时间段开展多波束水下探测工作,考虑以上条件要求,基站假设于泄洪洞进口上游拦污漂码头开阔地带。
无人船搭载多波束测量过程中,存在一次因信号丢失导致无人船自行返航情况,经修改设置后,无人船继续航线行驶开展测量任务,多波束实时采集通讯回传链路通畅。同时,为进一步测试无人船作业过程中的稳定性,此次无人船搭载多波束开展水下测量共作业3次,总共运行时间25 h左右,实际航行里程42 km,试验过程中无人船运行性态良好。
3.3 测量成果
3.3.1 检测成果
采用无人船搭载多波束探测技术对坝前水域进行全覆盖水下三维扫描,获取坝前水域水下地形三维点云数据,三维点云数据截图(图5),利用实测的三维点云数据生成近坝库区三维曲面图(图6),绘制坝前水域1∶100地形图(图7)。

图5 坝前区域水下三维点云数据截图

图6 坝前区域水下三维曲面图
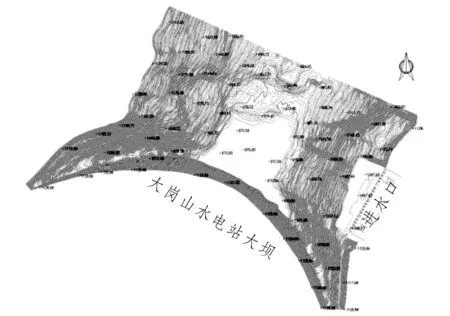
图7 坝前区水下地形图
3.3.2 测深精度
测深精度主要从相邻测线间点云的重叠度来判断,以两条相邻测线为例,其重叠情况见图8。由图8可见,相邻测线点云高差为0.05 m,满足《水利水电施工测量规范》中:当水深小于等于20m时,高程中误差为±0.2 m,当水深大于20 m时,对测深点高程中误差为±0.01H(H为水深)的要求。

图8 相邻测线点云重叠情况图
4 结 语
利用无人船搭载声呐设备,开展大岗山泄洪洞进口至坝前库段的水下测量工作,数据结果很好地反映了库区水下地形情况,顺利完成了该库区水下地形的测量任务。
试验表明,无人船搭载声呐设备能够高效、安全完成高山峡谷地区库区测量任务,且具有高度的自动化,避免因人员在船上作业带来的安全风险,适用于水电站库区、浅滩及紧急情况下的水下地形测量。当前无人船系统多数尚处于自动化阶段,在智能规划航线、智能主动避障及通信传输控制上还存在不足,但随着智能化、集成化水平的提高以及5G通讯技术的投入使用,这些问题都将得到更好的解决,也必将使无人船系统更加智能,使测量的精度、可靠性更高,并能适应更复杂的作业环境。