基于约束粒子群算法的网络节点定位技术研究
2021-09-15谢宏飞
谢宏飞
(湛江科技学院,广东 湛江 524000)
现代网路通讯技术不断发展,网络通讯技术在数据监测、环境保护工程甚至国防领域都在使用该技术。网络节点的研究引起众多国内外学者的注意,网络通讯技术是信息技术发展的重大变革,在网络通讯技术中信息传输要包含信息传递的位置,对数据的感知才具有实际意义,因此网络节点定位技术是网络通讯技术的关键性技术[1]。
网络节点定位技术的基本功能就是定位采集数据在坐标系中的位置,这种技术在医疗领域中用来定位病人病变部位,在灾害监测上的应用结果就是可以定位到灾害发生的具体位置。因此,网络节点定位技术的定位精度越高,在诸多领域中发挥的作用就越大[2]。
1 节点定位初始位置获取
在网络通讯传播中,节点的位置需要依靠三个邻近节点的锚节点进行位置的确定。锚节点的跳数信息被节点接收一次之后就不会接收第二次。因此,通过这种方式获取节点的初始定位的方法还是很靠谱的。初始位置不确定的节点在锚节点附近,测试与锚节点只会按实际距离,负责测量的锚节点数量大于3个,基本就可以确定节点的大概位置[3]。
首先设定三个节点的坐标:锚节点1坐标为(X1,Y1),锚节点2坐标为(X2,Y2),锚节点3坐标为(X3,Y3)。需要定位的节点T的坐标为(XT,YT),可以得到公式:

上述公式中字母d代表三个锚节点坐标到节点的距离,取节T上方的两个锚节点,锚节点1和锚节点2,以两个锚节点的坐标点为圆心,节点通信的距离r为半径画两个圆,基于通信的距离r必然大于锚节点的原理,两个圆会有交叉的部分,在两圆交接的地方进行采样,采样的坐标为初始位置的坐标,两圆心距离为2r,采样的门限设置为n[4]。节点与锚节点之间的距离为:

上述公式中,U1和U2是两个圆的圆心,D为圆心与位置加点之间的距离,V是规定的最大误差。剩余的锚节点的坐标为(X3,Y3),延续上述方法,以此坐标为圆心,通信距离的2倍为半径画圆,与节点圆的相交的阴影部分进行位置节点的采样,最终确定节点定位初始位置[5]。
2 约束粒子群初始化
约束主导粒子的目标函数中的函数结果分为可行结果和不可行结果。基于两个函数结果定义约束粒子群的算法原理,函数的结果有三种情况,第一种情况为两个结果都是不可行结果,但是其中一个结果的值小于另一个结果,两个结果都是可行结果,但是结果1的适应性比结果2更好。最后一种情况为两个结果刚好一个可行一个不可行,只取可行结果就好。函数的第一个结果定义为a1,第二个结果定义为a2。则a1结果的特征可以主导a2,函数两个解之间可行程度和不可信程度的对比,需要用到以下模型:

公式(3)中,g(a1)为关于算法函数结果a1的不等式约束公式,h(a1)为关于算法函数结果a1的等式约束公式。J为不等式的约束数量,n为等式的约束数量。函数结果a2的判断方式同上,为了利用约束粒子群算法进行节点定位创造可行域空间,使用定位突跳的定位机制,定位机制采用模拟概率理论最为理论支撑。在可行域值空间中随机选取的数值放到不可行域中都不会被接受,说明两部分域的范围划分正确。
只有可行域和不可行域的范围划分是正确的,约束粒子群的规模才不会发生变化,在粒子群中,飞行粒子的飞行速度较高。文献中提到的算法的飞行粒子的运动速度都很低,在搜索最优解的时候进程会很慢,约束粒子群函数的可行解会随机产生可带入算法的变量,编码形式采用传统的二进制编码,需要定位的时段有100个节点,最后一个节点的坐标可以设为(x100,y100)其他节点的坐标以此类推,基于第一步节点定位初始位置的坐标计算出约束粒子群算法函数的最优解,完成约束粒子群初始化。
3 基于算法交叉率获取节点定位最优解
基于算法函数结果的可行解适应度,进行算子的选取,集中变量在适应度值单位内的算法环境中进行变量淘汰,剩余的优质变量继续参与定位工作。选取群体中的两个优质变量进行约束粒子交换,交叉概率为P,优质变量结合后交叉概率越大,说明约束粒子群的定位精准度越高,优质变量结合后交叉概率越小,说明约束粒子群的定位精准度越低。需要进行实验验证变量的交换概率,当P的概率大于百分之五十,粒子重组,优质变量A的编码为:0001110101111000,优质变量B的编码为:0101110101111011新个体的编码A1为:1000010101111011,新个体的编码B1为:1000010101111000。A1、B1与A、B的契合度也高于百分之五十。基于上述条件,在传感器中随机产生N个节点,M个锚节点。基于上述交叉率进行采样组成粒子组群,约束粒子群已经做到了组群初始化,在初始化环境中可以直接计算采样点中的粒子的适度性,并记录适度性最好的锚节点坐标,粒子的适应度值高的在产生个体时被选中的概率也随之变高。记录每个约束粒子的最佳适度性数据,目标值小于最佳适度性数据将会进入最优解计算迭代,直到计算出最优解,才可以确定节点的最终定位。
4 模拟实验
为了验证本文基于约束粒子群算法改进的网络节点定位技术与传统方式比较是否都具有优势。进行模拟测试实验,对比该技术与传统技术相比,噪声的标准方差的对比,在定位测试中噪声的标准方差越大说明在定位中受到的干扰越多,定位的精度就越不准确。
4.1 实验准备
设置模拟测试环境为室内环境,在模拟环境中设置两个障碍物,命名为障碍物A和障碍物B。两个障碍物之间的间距不宜过短,大小和重量也要设置成不同规格。信号发射器在室内左上角最边缘处,信号接收机和信号发射机之间保证信号发射路径会路过两个设置好的障碍物。
实验分别在四种实验条件下进行,模拟实验条件信息如下:1号场景为13*10*6,障碍物为0;2号场景为20*12*6.2,障碍物为1;3号场景为25*13*6.5,障碍物为2;4号场景为30*15*7,障碍物为2。
四种场景室内环境的长、宽、高是逐渐增长的。在模拟场景1中,室内环境的长高宽数值设置都较小,室内环境的构造较小。信号发射和信号接收之间未设置障碍物,信号发射距离也较短。模拟场景2中设置1和障碍物,模拟场景3和4中都设置2个障碍物,在每个场景中都需要收集30个随机数据。测试的距离值设定为间距0.05 m以上,这样即使在面积最小的模拟场景1中也能保证收集数据的预留位置在80个以上。距离值随着测试次数增加。随着数据采集的进行,算法计算原始参数数据,随着障碍物对信号的干扰,参数开始发生变化。
4.2 实验结果与分析
基于上述实验环境对比该技术与传统方法相比,信号传播中噪声的标准方差,结果如下图所示:
由图1可以看出,本文设计的方法的定位精度更高,定位结果受到的干扰更小。

图1 四种模拟场景标准差对比曲线
基于上述实验环境,对比传统算法和本文选用的约束粒子群算法所用的时间开销,实验结果如表1所示:
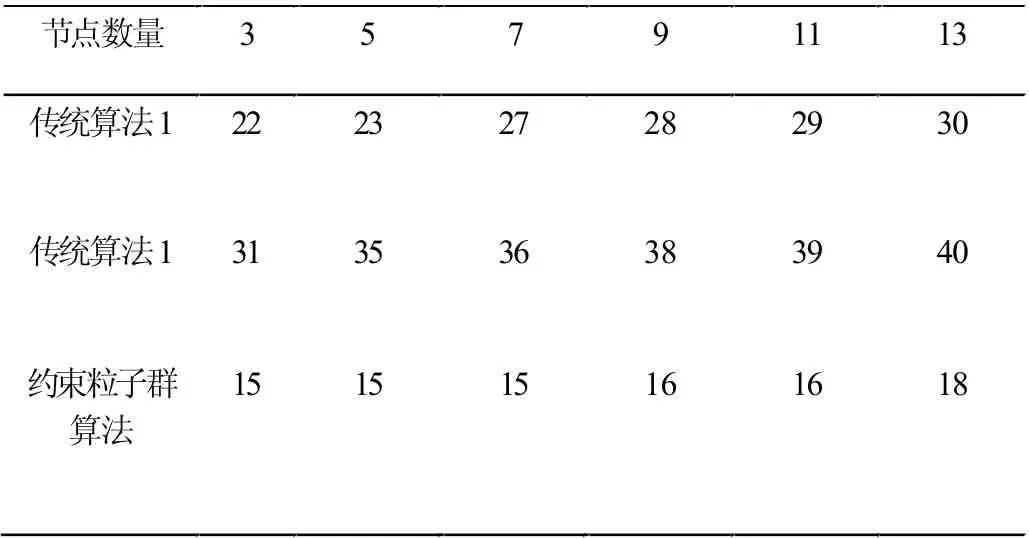
表1 定位过程的时间开销对比/ms
由上表所知,传统方式所选用的算法的时间开销随着节点数量的增多在不断延长,传统算法2点位13个节点所用的时间竟然达到了40ms,在实际的通讯过程中,节点数量较多,且本实验的实验环境在室内,障碍物只有两个。与实际状况相比,环境已经优化了不少。约束粒子群算法的时间开销稳定在20ms之内,在时间开销上远胜于传统算法。因此基于约束粒子群算法网络节点定位技术比传统技术更加节省点位时间。
结束语
本文基于约束粒子群算法改良传统的网络节点定位技术,基于约束粒子群算法的路径损耗和算法精度使改良过后的定位技术更加精准,但本问设计的方法对减弱环境噪声这一技术难题研究的还不够透彻,希望日后的研究中可以突破这一技术难关。
