超大空间双曲面大吊顶测量及三维扫描技术应用
2021-09-14李志瑞于秀斌鄢全科
李志瑞 陈 华 于秀斌 鄢全科 封 锐
中国建筑第八工程局有限公司 上海 201204
复杂的双曲面渐变分布吊顶系统,具有多造型拼接、超高安装难度大的特点,测量放线点多、面广、精度要求高。为保证双曲安装的效果,测量工作是实现设计的第一步,也是最重要的基础工作[1-3]。本文以杭州萧山国际机场三期工程航站楼大吊顶为背景,对复杂双曲吊顶的测量方法及三维扫描应用进行总结,可为类似工程提供借鉴。
1 项目背景
1.1设计理念
杭州萧山国际机场三期工程航站楼空间高大宽阔,整体设计以荷叶、荷花为蓝本,竖向柱采用荷叶造型,大吊顶采用菱形肌理单元分块,象形寓意“接天莲叶、出水芙蓉”;大吊顶的设计除去荷花谷、荷叶柱的独特造型外,根据整体建筑的特点与柱网分布,进行了整体天花造型的分割,形成主次有序的天花节奏,以富于流畅感的布局形态,凸出中国文化中的传承与启发,让人们感受到杭州这座城市独特的中国文化气质(图1)。

图1 航站楼室内设计效果图
1.2难点分析
1)前期结构、网架采用分区施工模式,航站楼共7个提升分区,根据提升分区大吊顶划分为2个施工标段,在不同单位且各施工区域不同期的情况下,如何保证安装效果统一是总承包管理统筹协调的重点,标段划分如图2所示。
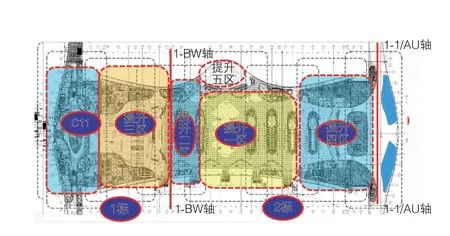
图2 航站楼网架提升分区
2)航站楼屋面系统为网架体系,施工采用整体提升方案,地面预拼装调整平面位置后整体提升,提升后再插入钢柱与封边桁架进行焊接,卸载后难免存在结构偏差。而吊顶及荷叶柱为复杂的双曲饰面板,结构与饰面的空间有限,施工前应进行结构复核,根据实际情况进行龙骨、板块下单是保证双曲效果的关键工作。
2 控制测量方案
2.1控制测量体系
为保证大空间双曲造型测量的整体性,本着整体控制局部、步步有检核的原则,项目平面控制网分三级测设:首级控制网为总控制网,二级控制网为航站楼出发层总控制网,三级控制网为轴线控制网。
首级控制网的建立以测绘院提供的控制点为基准,采用GPS静态布网进行敷设;二级控制网依据首级平面控制点,采用全站仪导线测量进行引测;三级控制网采用直角坐标法和极坐标法测设轴线控制点。GPS静态测量、直角坐标和极坐标测量的应用已较为广泛,本文不再对一级、三级控制网赘述,而大空间测量的起算控制测量方法应用不尽相同,大多未有较严谨的测量程序,下文将对二级控制网的测设展开说明。
2.2二级导线控制测量方案
根据首级控制网基准点坐标,进行二级平面控制网闭合导线布设(闭合导线等级标准二级),二级控制网平面如图3所示。
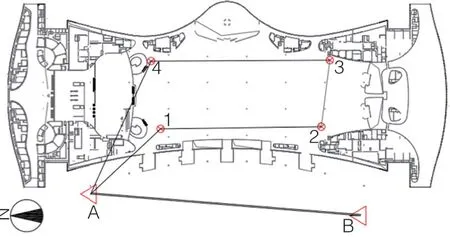
图3 二级控制网平面布置示意
采用徕卡TCR1201型全站仪进行角度测量(盘左盘右2测回取平均值)、距离测量(前后测回取平均值),由控制点按照顺时针方向,依次测量方向角、距离。
数据采集完后进行内业计算,观测数据取平均值后采用“四舍五入逢五无后则留双”的原则进行数值修约。通过已知点坐标、观测角及水平距离进行坐标正算,推导出控制点的坐标。为了减少坐标正算手工计算的难度,本项目利用Excel编辑内置函数和逻辑计算功能,设计了闭合导线计算表进行平差计算。
3 三维扫描方案
三维激光扫描是利用激光测距原理,由激光发射器发射出激光,再由接收器接收物体表面反射回的激光信号,利用时间计数器计算发射和接收激光的时间差,通过计算迅速获取物体表面大量密集点的三维坐标、反射率和纹理等信息。三维扫描测量工艺如下:站点布置→目标建筑三维扫描→点云数据处理→误差分析→模型确定→数据结果整理保存。
3.1三维扫描站点布置
三维扫描的目标建筑比较复杂,无法通过一次扫描工作便得到整体的三维数据,必须从不同的站点进行数据采集,从而将得到的数据进行拼接,得到完整的物体表面模型。根据图纸以及现场实地勘察,得到以下站点布置方式,见表1。

表1 三维扫描布点间距
3.2三维扫描的实施
根据大吊顶施工的精度要求,三维扫描选择FOCUSS 150机型实施扫描作业,作业实施如图4所示。

图4 三维扫描现场实施
3.3点云处理
在三维扫描测量过程中,存在一系列因素,影响测量点云结果的准确性,因此在进行建模工作之前需对点云进行相应的处理工作,点云处理的主要方法有噪声点剔除、数据精简、数据平滑处理和数据对齐等。
噪声点剔除:三维扫描测量过程中,受测量方式、被测量物体的材料性质及其他外界干扰因素,数据会产生较大的误差,需通过噪声点剔除筛选有效点云。
数据精简:三维扫描测量结果点云十分密集,数量庞大,因此需在保证测量精度的前提下,对测量数据进行精简。原则是:在扫描曲率变化较大的区域保持较多的数据点,在扫描曲率变化较小的区域,减少数据点。
数据平滑处理:点云中存在的部分随机误差会影响后续曲面的构建,在构建曲面之前,需对点云数据进行平滑处理,常用方法为平均值处理。
数据对齐:在测量不同区域时,测量位置对应的坐标系并不相同,所以需要把不同测量区域的坐标系统进行统一并消除相应重叠部分。
3.4建立最终模型
根据拼接好的点云模型,优化抽稀5 mm×5 mm间隔,删除非施工区域范围,最后将处理完成的点云模型与理论钢结构模型进行碰撞检测。根据点云处理完成后的结果与理论模型对比,发现其中的碰撞,确认空间是否满足施工需求。根据模型调整相应的施工参数,如图5所示。

图5 荷叶柱模型调整分析
4 大吊顶施工测量方案
本项目大吊顶双曲板细缝处拼接要求2 mm,对施工的安装要求极高,因此,大吊顶施工过程从配件系统安装到主龙骨、弧形副龙骨、吊装盘和铝板的安装,全站仪全程跟踪定位及检测,实时用Rhino软件提取数据,在现场标示出来,指导工人安装。
计算工作由仪器在现场自动完成,并在显示屏上显示相应坐标(也可自动记录在电子手簿内),因而杜绝了人工计算出错的问题,同时提高了效率。
在现场放样时,按照三维坐标法的原理,其测量放样方法如图6所示。一般是在一个控制点上架设全站仪,设置好各项仪器参数,以固定点为后视方向进行定向,完成测站设置后,依次在待测结构轮廓点处立镜,全站仪照准相应轮廓点处的反射棱镜或反射贴片进行测量,仪器立即显示出各点的三维坐标。

图6 全站仪三维放样示意
5 结语
1)采用整体控制测量的方式,为大空间吊顶系统安装提供统一且精准的起算依据,保证了分段、分期施工的统一性。
2)应用三维扫描技术,对结构误差进行分析,调整模型及基层龙骨尺寸,消除了结构误差带来的安装难度。
3)采用精密施工测量,对大吊顶系统安装过程进行三维坐标定位,保证了饰面层的空间定位精度。
