永磁同步电机转子初始位置辨识研究综述
2021-09-14李广林胡志远
刘 利,李广林,刘 超,刘 佳,曹 静,谢 宇,胡志远
(首钢智新迁安电磁材料有限公司,迁安 064400)
0 引 言
永磁同步电机因其结构简单可靠、高效率和高功率密度的特点在电气驱动领域获得了广泛的应用[1-2]。永磁同步电机无论是在起动时或是对其精确控制过程中,都需要获取精确的转子位置,使用编码器或旋转变压器等设备获取初始位置的传统方法不仅增加了系统的成本,也降低了装置的可靠性,限制了永磁同步电机的应用[3]。鉴于传统转子位置辨识方法的限制,研究人员提出利用电机控制系统本身装置及其电信号进行转子位置检测的方法,并成为转子位置辨识研究的热点方向。
在辨识转子位置过程中,根据转子是否发生转动,可以将辨识方法分为转动辨识方法和静止辨识方法。其中转动辨识方法是对电机施加固定方向的激励信号,利用产生的转矩将转子旋转至固定位置,该种方法主要有转子预定位方法[4]和低频旋转信号注入方法[5-6]等;静止辨识方法则是对电机激励信号的响应信号进行解析,追踪响应信号与转子初始位置间的关系,从而获取其中包含的转子位置信息,该类方法主要有脉冲电压方法[7-9]、旋转高频信号方法[10-13]和脉振高频信号方法[14-16]、非正弦高频信号法[17-20]等。
大多数转子初始位置辨识方法分为两个步骤,第一步辨识转子轴线位置,第二步辨识转子磁极极性。在磁极极性辨识方法中,脉冲电压法和响应电流幅值法应用广泛,也有相关学者提出利用响应电流二次谐波进行极性辨识的方法。本文结合近几年研究成果,将在转子轴线位置辨识和磁极极性辨识两个方面,对转子初始位置辨识方法的研究情况作出介绍。
1 转动辨识方法
1.1 转子预定位法
当向电机定子中注入固定方向的电压信号时,会在定子中沿着注入信号方向形成定子磁势,该定子磁势与转子永磁体形成的沿着转子直轴方向的磁势相互作用,产生电磁转矩表示:
Te=KFsFrsinθsr。
(1)
式中:Te表示电磁转矩;K为转矩系数;Fs为定子磁势;Fr为转子磁势;θsr为注入信号方向与转子直轴方向夹角。产生的电磁转矩方向为沿着转子直轴的切线方向指向注入信号方向,该转矩带动转子向注入信号方向转动,直至两个方向重合,从而完成转子位置的定位辨识。
转子预定位辨识方法简单实用,但是精度较低,无法满足高性能控制系统的需求,在实际应用时,诸多因素会对该方法的辨识精度产生影响。主要有:
1) 转子转动过程中会受摩擦力的影响,尤其是在转子直轴方向和信号注入方向相接近时,此时电磁转矩小,受摩擦力影响大,当转矩和摩擦力达到平衡状态时转子静止,此时转子直轴方向与信号注入方向存在误差;
2) 电机与负载连接时会存在负载转矩,当负载转矩方向与转子转动方向相同时,辨识角度大于实际角度;当负载转矩方向与转子转动方向相反时,辨识角度小于实际角度,且负载转矩越大,误差越大。
3) 由于电机定子齿槽造成电机磁阻不均匀现象会产生电机定位转矩,该转矩使得在辨识转子位置过程后,辨识角度与实际角度间仍有一个角度差值,用来平衡定位转矩,造成辨识误差。
由于注入信号的方向是随机的,当沿着转子实际位置附近的反方向注入电压信号时,转子形成的电磁转矩近似为0,在摩擦力、负载转矩和定位转矩等作用下,转子处于不稳定的转矩平衡点而保持静止,此时的信号注入方向并非为转子实际位置方向,从而造成辨识失败。为了应对这种情况,文献[21]提出分三次向电机定子绕组中施加电压信号,每个信号相差120°电角度的方法,该方法能够有效避免注入信号与转子位置方向相反造成的辨识失败问题,提高了辨识的可靠性,但是也存在辨识时间长的问题。
1.2 低频旋转信号法
低频旋转信号辨识方法是通过向定子绕组中注入低频电压信号使电机产生微动,利用微动转矩与电流矢量和转子位置之间的关系,计算出转子的位置信息。
当向电机定子绕组中注入极低频率的旋转电压信号时,电机电压方程中电感压降可以忽略不计,电阻压降则不能忽略,此时电压方程表示:
(2)
式中:ωe为转子电角速度;ψf为永磁体磁链。注入的低频信号表示:
udq=Uampej(ω-θe)
(3)
式中:Uamp为注入电压幅值;ω为注入旋转电压角速度;θe为转子初始位置角度。当注入信号的频率足够低时,d轴压降主要为电阻产生,q轴压降则主要是反电动势,将响应电流变换到αβ坐标系中的形式[22]:
(4)
式中:IA-d,IB-q分别为d、q轴电流响应幅值。由式(4)可知,响应电流中包含转子位置信息θe,为了分离转子位置信息,对式(4)左右同乘ejωt,得到:
(5)
式(5)中,由注入信号频率2倍频率的周期分量和包含转子位置信息的常值分量构成,为了得到转子位置信息,对式(5)进行傅里叶分析运算提取常值分量:
(6)
再对式(6)进行反正切运算,即可得到转子初始位置角。
由于该种方法在辨识过程中电机会发生微动,因此对电机的工作环境有一定的要求,当电机连接负载时将无法完成辨识过程,同时还存在对电机参数依赖性高,当辨识位置与实际位置相接近时准确度降低等问题。
2 静止辨识方法
2.1 脉冲电压法
脉冲电压法是向电机定子中注入一系列电压脉冲信号,该信号具有相同的幅值,沿正反两个方向分别注入,利用永磁体直轴方向的磁路饱和状态和磁导率均与其它位置不同,导致在不同方向注入脉冲信号对应的响应电流中包含转子位置信息。
当转子位置θ为±π/2时,转子永磁体磁路和A相绕组轴线正交,转子在绕组上的磁通分量为0,绕组饱和度最小,电感值最大;当θ为0时,转子磁动势和A相绕组磁动势方向相同,造成A相磁路饱和程度最大,电感值最小;当θ为π时,转子磁动势和A相绕组磁动势方向相反,去磁效果使得磁路饱和程度降低,电感值较θ为0时电感稍大。基于电感的饱和效应,造成电感值随转子位置呈现近似正弦变化规律。分析可知,当转子位置位于0和π时,其对应电感差值最大。
文献[23]通过控制功率管的通断使电机两相导通,非导通相悬空的方法向电机中注入高频低压脉冲信号,利用RL电路电流响应原理辨识线电感值,再将线电感通过Clarke变换转换到αβ坐标系中,其电感形式:
(7)
式中:Lg2为自感二次谐波幅值。利用反正切运算可以得到转子轴线位置。
文献[24]利用转子在不同位置所对应的电感差值不同的原理,分别向绕组中沿着正反两个方向注入一系列幅值相同的电压脉冲,利用响应电流幅值的大小判断转子位置。当注入正反方向电压矢量对应的电流幅值差值最大时,该电压矢量对应位置即为转子轴线位置。为了提高转子位置检测可靠性,文献[25]提出等宽电压脉冲和电压矢量判断相结合的方法来提高转子位置辨识的可靠性。该方法将电压矢量判断得到电压矢量与等宽电压脉冲区域比较,如果电压矢量在区域内,即表明该矢量对应的角度位于转子磁极位置附近。
2.2 旋转高频信号法
高频信号法是向电机绕组中注入高频信号,利用电机的凸极特性,在电流响应中分离出转子位置信息[26-28]。高频信号法可以分为旋转高频信号法[29]和脉振高频信号法[30],这两种方法是以高频信号注入轴系的不同进行区分。
旋转高频信号法原理是向电机的静止坐标系α,β中注入三相对称的高频电压信号,为了找出响应电流信号与转子初始位置间的关系,对响应高频电流信号进行采样和信号处理。设定注入的高频信号形式:
(8)
式中:uαh,uβh表示在两相静止坐标系中的高频电压信号;Uh,ωh分别为注入的高频电压信号的幅值和频率。将注入信号式(8)代入电机电压方程中并进行转换,得到两相静止坐标系中响应高频电流信号形式:
(9)
式中:L0=(Ld+Lq)/2为均值电感;L1=(Lq-Ld)/2为差值电感;θe为转子实际位置。将上式转换为矢量形式:
(10)
由式(10)可知,响应电流的负序分量中包含转子位置信息θe,在提取θe时可以利用同步旋转滤波器获取负序分量,利用低通滤波器滤除负序分量中的高频量,再对滤波后的信号进行反正切运算,最终得到转子磁极位置。
高频旋转信号法利用了永磁同步电机的结构凸极特性对转子位置进行辨识,因此该方法不适用于表贴式结构的电机转子位置辨识。该方法辨识稳定性强,但是也存在精度差、辨识结果受数字控制采样和计算延时等因素的影响,由于带通和低通滤波器产生的系统相移的影响,辨识结果会小于实际值。针对这些问题,文献[31]利用影响辨识精度的因素在正序和负序信号中的相关性,通过提取正序信号中的相位偏差,对负序信号中的相位差进行补偿,从而提高辨识精度。将滤波器对辨识结果产生的误差用角度α表示,将数字控制过程中产生的影响误差用角度β表示,则考虑两种误差时的高频响应电流信号应为:
(11)
将式(11)中正序分量和负序分量中的高频分量分别通过同步旋转滤波和低通滤波去除,再利用反正切分别获得转子轴线位置信息和误差信息,再将获取的两个信息求和,从而消除误差的影响,提高辨识精度。
2.3 脉振高频信号法
在估计旋转坐标系中注入的高频信号形式:
(12)
(13)

(14)
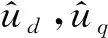
利用锁相环对转子位置误差信号进行锁向,使误差信号趋近于0,此时估计的转子位置角即处于转子实际轴线位置处。信号处理过程如图1所示。
图1 脉振信号法信号处理图
脉振高频信号法具有辨识精度高,同时受非线性因素影响小的特点[32],但是在信号处理过程中,滤波环节会对系统的幅值和相位产生影响,从而降低辨识精度。针对该问题,文献[33]提出一种无滤波器的高频脉振信号辨识方法。该方法利用估计直轴中的高频正弦信号,消除估计交轴中的高频正弦信号,得到转子位置误差信号,利用锁相环对误差信号进行锁相处理,使误差信号趋近于0,从而得到转子轴线位置的估计值。该方法去除了滤波环节,从而提高辨识精度。
2.4 非正弦高频信号法

(15)
式中:k表示离散采样时刻。将方波信号代入电机方程中,并经过坐标变换得到旋转坐标系中的响应电流形式:
(16)

(17)
再利用锁相环对误差信号进行锁相可以获取转子磁极位置。
在该方法中,由于锁相环获取转子位置过程中存在不稳定零点,会造成辨识失败。针对这种情况,文献[34]提出在静止坐标系中注入方波信号的方法,有效避免了不稳定零点造成的辨识失败问题。
(18)
将高频三角波进行傅里叶分解后得到:
(19)
将上式代入电机的电压方程中,得到估计坐标系中的电流响应:
(20)
(21)
再利用锁相环对转子位置误差信号进行锁相,得到转子位置信息。
比较方波和三角波辨识方法的信号处理过程发现,两种方法均采用直接调制方法,即将响应电流与调制信号相乘得到位置误差信号,再对误差信号进行锁相。该方法避免了滤波环节对辨识精度的影响,但是也存在调制后的误差信号中叠加高频毛刺信号干扰影响辨识精度的问题。
3 磁极极性辨识
在转子初始位置辨识方法中,无论是转子微动法、脉冲电压法或是系列高频信号辨识方法,均无法辨识出转子磁极极性,还需要对磁极极性进行辨识。在磁极极性辨识方法中,大多是利用磁路饱和特性原理,求出转子轴线位置正反方向的响应电流或是等效电感的大小来进行极性判断。
3.1 等宽脉冲电压法
在电机设计过程中,为了能够充分利用材料性能,通常将磁路设定在轻微饱和状态。当绕组中电流形成的磁势和转子d轴正方向同向时,会加深磁路饱和,反之会降低磁路饱和程度。利用磁极饱和效应,向辨识出的转子轴线位置的正反方向分别注入幅值和宽度相等的电压脉冲,当注入方向和磁极方向同向时,磁路饱和程度加深,电感变小,响应电流峰值较大;当注入方向和磁极方向相反时,磁路饱和程度减小,电感增大,响应电流峰值较小,利用两次响应电流大小判断磁极极性。该方法由于需要检测电流,提高了对系统的要求,当测量精度有限时会降低准确性。针对该问题,文献[36]提出检测响应电流衰减时间辨识磁极极性的方法,有效提高了准确性。
3.2 响应电流二次谐波法
采用脉振高频信号法辨识转子初始位置时,在响应电流的高频谐波成分中包含了转子磁极极性信息,可以对响应电流的谐波进行调制来获得磁极极性。该方法不需要额外注入信号进行磁极极性辨识,且初始位置辨识和磁极极性辨识可以同时进行。
经过转子初始位置辨识后,转子轴线位置与实际位置重合时,估计直轴的脉振高频响应电流信号表示[37]:
λ1cosφh1cos(2ωht)-λ2sin(3ωht)]
(21)
式中:λ0、λ1、λ2分别为基波、一次谐波、二次谐波幅值;φh1为一次谐波中的初始相位角。由式(21)可知,在直流部分和二次谐波部分中均含有磁极信息φh1,而选择二次谐波部分进行辨识可以去除测量直流量偏移对辨识结果的影响。
对响应电流按照图2进行信号解调,得到解调后的直流分量信号:
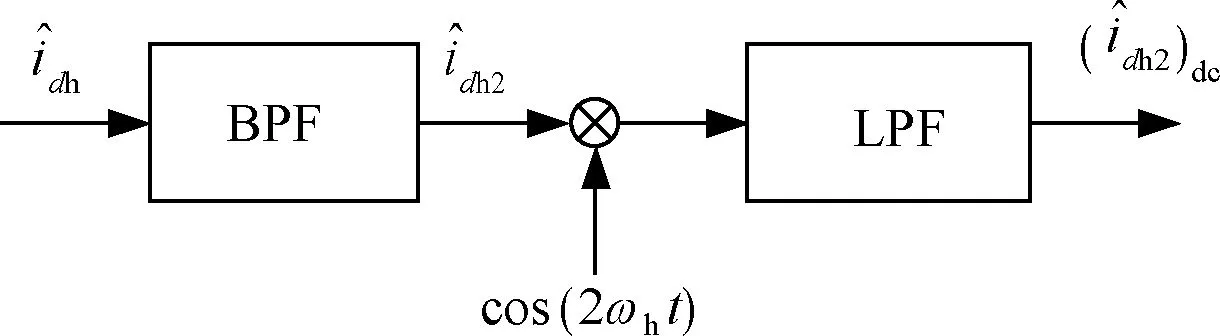
图2 信号处理图

(22)
3.3 响应电流幅值法
在向电机绕组中注入脉振高频信号时,响应电流的幅值可以表示[31]:
(23)
通过注入直流偏置和高频脉振的混合信号,利用直流偏置信号改变磁路饱和程度对电感值Ld进行改变,使得高频脉振信号对应的响应电流幅值也随之变化。向初次辨识方向注入两次混合信号,两次混合信号中的直流量幅值不同,脉振信号幅值相同。当初次辨识方向即为转子实际位置时,直流偏置信号使磁路进入饱和区域,电感值随着偏置电流的增大而减小,此时幅值大的直流偏置信号对应的响应电流幅值也变大;当初次辨识位置位于转子实际位置的反方向时,注入的直流偏置信号使磁路进入线性区,电感值随着偏置电流的增大而变大,此时幅值大的直流偏置信号对应的响应电流幅值小。通过比较响应电流幅值大小实现磁极极性辨识。
该方法在初次辨识位置与转子实际位置相反时容易出现辨识失败的情况。因为在磁路的线性区内电感值近似定值,两次直流偏置信号引起的电感值变化量很小,在叠加信号采样误差等情况下容易出现辨识失败情况。为了提高辨识精度,文献[32]提出在初次辨识位置的正反方向分别施加幅值相同的直流偏置和高频脉振混合信号,使得在两次注入过程中在磁路的饱和区和线性区分别有辨识信号,增大了两次信号引起的电感值的差值,增大响应电流信号幅值的差值,提高了辨识精度。
4 结 语
以转子预定位和低频旋转信号方法所代表的转动辨识方法中,其优点在于辨识过程简单,但是存在辨识精度容易受到摩擦和负载的影响,该影响在辨识位置接近转子实际位置时尤为明显,且该方法由于电机的转动而使得应用场景受到限制。
脉冲电压法理论上可以实现高精度的转子位置辨识,且在辨识过程中可以将初次位置辨识和极性辨识结合起来,达到减少辨识时间和注入信号次数的目的。但在实际应用中,当注入脉冲电压矢量的角度差缩小到一定范围时,不同电压矢量对应的电感差异性降低,且受限于采样电路精度和干扰的影响,无法保证辨识精度。
高频信号注入法利用电机的凸极特性实现转子位置辨识,该方法根据注入信号参考轴系的不同而分为旋转高频信号法和脉振高频信号法。旋转高频信号注入法对电机参数敏感性低,且易于工程实现,但是该方法只适用于有明显凸极效应的内嵌式永磁电机。脉振高频信号法则由于可以在定转子气隙间产生饱和凸极效应,因此同样适用于表贴式永磁同步电机。由于转子凸极的对称性的存在,无论采取何种方法均需要进行磁极极性辨识[38]。
相比于旋转高频信号法和脉振高频信号法中注入的正弦信号而言,注入方波和三角波的非正弦信号具有更高的系统动态响应,可以提高系统带宽和简化载波分离难度[19],从而去除了信号处理过程中的滤波环节,但是该方法会产生更大的损耗。
随着永磁同步电机在高精度控制场景中的广泛应用,势必会对其起动速度、控制精度提出的更高要求。通过比较各种辨识方法的优缺点可知,高频信号注入方法因较高的辨识精度而受到更多的关注,正朝向提高精度、最优化注入信号、简化信号处理、降低辨识损耗等多元化方向发展。