一种基于跳数修正和跳距优化的DV-Hop定位算法
2021-09-14张媛王梅缪相林丁凰
张媛,王梅,缪相林,丁凰
( 1.西安交通大学城市学院计算机系,西安 710018;2.西安交通大学计算机学院,西安 710049)
0 引言
随着智能信息产业的发展,基于无线传感器网络(WSN)[1]在智慧农业、智能康复医疗和战场防线勘察领域得到了广泛的应用.多数的WSN 应用需要获取节点的位置信息[2],需通过定位算法估计节点位置,即对节点进行定位.
目前节点定位算法可分为两类:测距和非测距定位.基于接收的信号强度指示(RSSI)[3]、到达时间差(TDOA)[4]和到达角度(AOA)[5]属测距定位算法;质心定位、DV-Hop定位[6]和凸算法属非测距定位算法.相比于测距定位算法,非测距定位算法无需额外的硬件设备测量距离,降低了定位成本.
作为经典的非测距定位算法,DV-Hop 算法被广泛应用于估计节点位置.尽管DV-Hop算法的复杂性低,但其也存在一些不足.如最小跳数估计精度不高,跳距估计误差大.为此,研究人员提出了不同的改进策略.
胡玉兰等[7]提出基于平均跳距优化的DV-Hop改进算法(AHDD).通过对跳数进行优化,提高估计平均跳距的精度;邓浪等[8]对DV-Hop算法的跳数进行优化,并利用最小均方差准则估计平均跳距,提高测距精度;Gao等[9]引入粒子群优化算法,利用粒子群算法修正节点位置,提高定位精度.尽管上述算法减少了定位误差,但仍存在最小二乘法初值敏感以及生物智能算法的复杂度高等问题.
为此,针对DV-Hop算法的定位精度问题,分析了导致定位精度不高的原因,并提出基于跳数修正和跳距优化的DV-Hop定位算法(NHDL). NHDL 算法利用信号强度值对跳数进行修正,并利用锚节点间已知的位置信息对跳距误差进行优化.同时采用易实现的最小最大法估计节点位置.仿真结果表明:提出的NHDL 算法有效地提高了定位精度.
1 DV-Hop定位及误差分析
DV-Hop定位算法主要由三个阶段构成:1)未知节点与锚节点间的最小跳数的估算;2)未知节点与锚节点间的平均跳距的估算;3)未知节点位置的估算.其中,跳数和平均跳距的估计存在较大的误差.
1.1 最小跳数的估算
传统的DV-Hop定位算法不论邻居节点间的实际距离远近,只要接收到邻居节点发送的分组包,就将跳数设置为1.如图1所示,锚节点L1与未知节点A,节点A与节点B的距离不同,但是对于节点A而言,它们离自己的跳数均为1跳.通过这种方式估算跳数,再利用跳数测算距离必然会产生定位误差.

图1 DV-Hop算法误差分析图
1.2 平均跳距的估算
依据DV-Hop 算法估算平均跳距策略,锚节点L1所估算的平均跳距为:( 40+40)/(4+4)=10.未知节点A接收此平均距离信息后,利用跳数与平均跳距的乘积作为离L1的距离: 1 ×10= 10.但是实际上,L1与未知节点A的距离为5.
通过上述分析可知,DV-Hop定位算法在最小跳数和平均跳距的估算阶段存在明显的误差.为此,NHDL 算法将对跳数和跳距进行修正,再通过最小最大法估计未知节点位置.
2 NHDL定位算法

2.1 基于RSSI 的跳数修正
若直接利用分组包传递的次数,估计锚节点间的跳数存在偏差.为此,利用接收的信号强度指示(RSSI)对跳数进行修正.
采用对数衰减模型,通过RSSI 估计距离,如式(1)所示:


图2 信号传输模型

锚节点将修正后的跳数载入分组包中,向下一跳邻居节点广播.接收到分组包后,节点先从分组包中提取跳数值,并检查是否已保留了离发送节点的跳数值. 若已保留,就比较这两个跳数值,并存储两值中的最小值作为这两个节点间的跳数.然后,再将此跳数加1,继续广播分组包.
2.2 基于锚节点位置的平均跳距优化

2.3 定位盲区感知的锚节点选择
文中考虑了节点位置属二维空间.估计二维空间中节点的位置,至少3个锚节点的测距信息.因此,在估计节点位置时,需选择3个锚节点,并建立相应的距离方程.然而,如果所选择的3个锚节点位于同一条直线,即共线,就无法估计节点位置,出现定位盲区[10].
为了避免定位盲区,NHDL 算法先通过行列式法计算3个锚节点所形成的区域面积,再判断区域面积是否为零.若为零,则表示这3个锚节点共线;反之,不共线.具体过程如下:

2.4 基于最小最大法的节点位置估计
首先,未知节点通过修正后的最小跳数以及优化后的跳距,计算离锚节点的距离;然后,利用最小最大法计算自己的位置坐标,即定位.最小最大法的思路如下:未知节点获取离锚节点的距离后,以锚节点位置为圆心以估计的距离为半径形成圆的外接矩形.二维空间的位置,至少需要形成以3 个非共线的锚节点的外接矩形;最后,以3个外接矩形所重叠的区域的中心位置为未知节点位置的估计值.


图3 基于最小最大法的节点位置估计
2.5 定位流程
首先,部署节点.锚节点广播分组包.网络内所有节点通过接收分组包以及RSSI值对最小跳数值进行修正,并存储最小跳数值.
然后,锚节点依据2.2节对平均跳距进行修正,再进行广播分组包,未知节点接收到分组包后,估算离锚节点的距离.当获取3 个以上锚节点后,再从中选择3个非共线的锚节点,并依据最小最大法估计位置,NHDL 定位算法流程如图4所示.
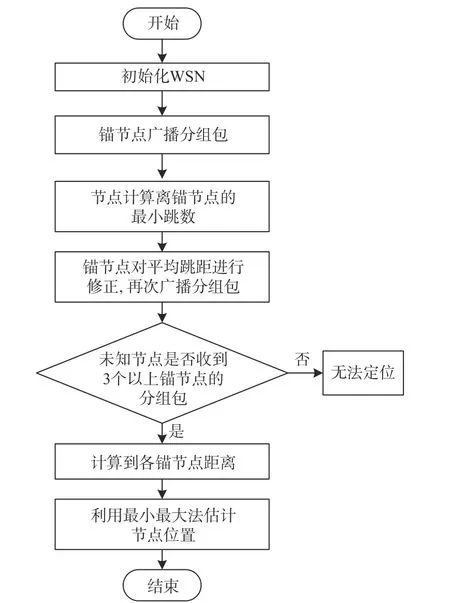
图4 NHDL定位算法流程
3 仿真与分析
3.1 仿真环境

3.2 锚节点数对定位精度的影响
本次实验参数如下:未知节点数n=100;R=20 m;锚节点数从10~40变化.图5给出了DV-Hop算法、AHDD算法和NHDL 算法的平均定位误差随锚节点数的变化情况.
由图5可知,平均定位误差随锚节点数量的增加呈下降趋势.当锚节点数量较少时,增加锚节点数可以有效地降低平均定位误差;但当锚节点数达到一定数量后(大于25),平均定位误差随锚节点数量增加而变缓慢.这说明并非增加锚节点数就一定能够降低平均定位误差.

图5 锚节点数对平均定位误差的影响
此外,相比于DV-Hop算法和AHDD算法,提出的NHDL 算法具有较低的平均定位误差.这归功于NHDL 算法通过RSSI值对跳数进行了修正,控制了跳数估计的误差.同时,利用锚节点间已知的位置信息,平均跳距进行了优化,最终提高了定位精度.
3.3 未知节点数对定位精度的影响
本次实验参数如下:未知节点数从60~200变化,锚节点个数等于10%的未知节点数,节点通信半径为20 m.DV-Hop 算法、AHDD算法和NHDL 算法的平均定位误差随未知节点数的变化情况,如图6所示.

图6 未知节点数对平均定位误差的影响
由图6可知,节点数的增加有利于定位精度的提升.原因在于:网络内节点数越多,网络的连通性越好,节点能够获取的定位信息越充分.此外,相比于DV-Hop 算法和AHDD算法,NHDL算法在平均定位误差性能方面具有较大的优势.例如,当节点数为200时,NHDL 算法的平均定位误差为0.122 m,而DV-Hop 算法和AHDD算法的平均定位误差分别为0.274 m 和0.237 m.
3.4 通信半径对定位精度的影响
最后,分析通信半径R对定位精度的影响.本次实验参数:未知节点数n=100;锚节点数为10 个;通信半径从15~40 m 变化.
图7给出DV-Hop算法、AHDD算法和NHDL算法的平均定位误差随通信半径R的变化情况.由图7可知,通信半径的增加有利于降低平均定位误差.原因在于通信半径越大,节点通信的范围越大,能够获取的定位信息越多,这有利于提高定位精度.

图7 节点数对平均定位误差率的影响
此外,相比于DV-Hop算法和AHDD算法,NHDL算法降低了平均定位误差.在通信半径较低时,NHDL算法在平均定位误差性能方面的优势更明显.例如,在通信半径为20 m 时,NHDL 算法的平均定位误差为0.183 m,而DV-Hop 算法和AHDD算法的平均定位误差分别为0.520 m 和0.294 m.
4 总结
基于传统的DV-Hop算法的定位精度不高的问题,提出基于跳数修正和跳距优化的DV-Hop定位算法NHDL. NHDL算法对跳数和跳距的计算过程进行优化,降低定位误差.利用易实现的最小最大法估计未知节点位置,降低算法的复杂度.仿真结果表明:提出的NHDL 算法有效地降低了定位误差.
