基于干涉合成孔径雷达测高原理的雷达散射截面测试杂波抑制方法
2021-09-14宁超吕鸣高超万昊
宁超, 吕鸣,2, 高超, 万昊
(1. 电磁散射重点实验室,北京 100854; 2. 中国传媒大学 信息与通信工程学院,北京 100024)
目标雷达散射截面的(radar cross section ,RCS)定义是一个远场的概念[1-2],要求照射目标的入射波和到达接收天线的散射波均为平面波, 但真正理想的平面波是不存在的. 在工程上,室外场RCS测试,一般采取距离远场的方式,即目标与测量系统之间的距离足够远,入射波和散射波近似为平面波;在室内则是利用抛物反射面等设备,在一定区域内,将馈源辐射的球面波转换成平面波[2]. 当测试条件受限,无法实现近似平面波时,研究人员采用近远场变换的测量方法,从近场散射回波中反演目标的远场散射信息,进而得到RCS[3]. 严格的近场散射测量需要完备的双站信息,工程实现困难,为适于工程应用,人们提出了梅林滤波、柱面场修正和雷达成像修正等多种近远场变换技术[4-6],虽然这些方法都采取了一些等效或近似,影响了RCS测试精度,但近场RCS测试技术不失为一种解决工程问题的途径. 近场扫描RCS测试过程中,由于环境受限、目标架设等原因,地面杂波、支撑结构回波等都会与目标回波一起进入接收机. 因此,如何抑制杂波是近场成像测量系统需要解决的关键技术之一.
目前,RCS测试中常用的杂波抑制方法包括距离门滤波、背景矢量对消等方法[1-4]. 这些方法操作简单、效果明显,但也存在一些不足. 距离门滤波方法的基本原理是利用目标与杂波到达接收机的时间不同,设置时域滤波器,使目标回波完全在时域滤波器通带以内而杂波尽可能处在通带以外,从而提高接收信号的信杂比[1,4,7]. 距离门滤波从实现方式上分为硬件选通门和软件选通门两种. 其中硬件选通门技术是指脉冲RCS测量系统的发射机发射脉冲串,接收机加装选通门. 仅当目标反射信号到达接收机时选通门打开,与目标反射信号在时间上有差异的其他干扰信号到达时选通门关闭,从而排除干扰信号对测量的影响;软件距离门技术是扫频测量过程中,对扫频测量获得的RCS数据变换得到高分辨一维距离像,利用软件功能在目标区范围内加距离波门,以屏蔽目标区以外的杂波干扰. 距离门滤波方法的缺点是只能抑制径向距离上与目标存在差异的杂波源,而对位于目标区内的地面杂散、支架回波、目标支架耦合回波等无效. 背景矢量对消则认为测试场地的背景回波与目标回波是相互独立的,通过单独测试空场地回波得到背景估计值,然后将其从目标测试数据中减去,从而消除背景杂波干扰[7]. 但实际上,经过试验发现,在室外测试时,由于周边地物等环境的时变性,测试时间较长时,矢量背景对消效果将大打折扣[8],而且目标与地面或支撑系统的耦合散射也无法通过背景对消消除. 原赛赛等[9]提出了一种时变环境下RCS测量中的精确背景抵消处理技术,通过建立测量系统-测试场时变传递函数的参数化模型,来表征环境变化对雷达接收回波的影响,以改善背景对消效果.
此外,目标进入测试场地后对背景或多或少都会产生影响,例如大重量目标使支撑机构产生形变从而改变其回波特性[10]. 针对这个问题,YANG等[11]提出了改进的背景对消方法,通过在金属支架顶端加装目标运动机构,获得同一姿态下多个不同位置的目标回波数据,利用这些数据,可以计算分类得到包含金属支架回波在内的场地背景值和目标的RCS值;但该方法测试数据量较大,测试时间较长. LORENT等[12]提出了一种类似的背景估计方法,但利用专门设计的旋转偏心体替代了复杂的目标运动机构,通过旋转偏心体旋转一周的回波数据即可得到场地背景估计,但该方法仅能用于ISAR测试模式,不适用于近场扫描模式等SAR测试模式,而且对于目标与地面或支架的耦合也无法消除. FOWLER等[13]提出了一种基于零多普勒滤波原理的杂波抑制方法,零多普勒杂波是ISAR测试中目标的固有现象,即目标随转台旋转,目标回波相位快速变化,有较高的多普勒频偏,而环境、支撑机构等是静止的,背景杂波的频偏为0,滤除0频率即可抑制杂波;梁雅丽、许小剑等[14-16]基于最大概率数据域处理方法,提出了一种改进的零多普勒杂波抑制方法. 但在SAR模式下,背景回波同样存在多普勒运动分量[17],因此也不适用. FISCHER等[18]提出了一种基于基追踪降噪(BPDN)的RCS测试杂波抑制方法. 针对目标散射中心在空间域中一般表现为稀疏分布的特点[19-21],该方法利用BPDN技术实现了将目标回波从测试信号中分离的目的. 不过,该方法的有效性与目标空间稀疏度(或者杂波量值)预估的准确度密切相关,如果目标稀疏度估计失准,该方法的实际效果将大打折扣. LYU等[22]提出了一种非屏蔽环境中RCS测试对外界射频干扰信号的抑制方法,但该方法仅对窄带宽、固定频带的干扰信号有效.
针对近场直线扫描模式RCS测试特点,本文基于干涉测高原理,结合直线扫描近场RCS测试特点,提出一种高度向滤波的方法,可抑制距离门内的不同高度的杂波. 首先通过不同高度天线的直线扫描并经过近远场修正后得到两幅雷达像,提取雷达像中各个散射中心的幅度和相位信息;再基于干涉合成孔径雷达(interferometric synthetic aperture radar,InSAR)高程测量原理,利用散射中心在两幅雷达像中的相位差,结合波长、测试距离、天线的高度等参数,计算得到各散射中心的高度;进而根据被测目标的高度范围设计滤波器,滤除目标高度区域外的杂波,最后重构得到待测目标的RCS. 本文对该方法的有效性进行了仿真验证. 某飞机模型的试验测试结果也表明通过高度向滤波,能有效抑制背景杂波,从而提高改善扫描成像质量及RCS测量精度.
1 雷达近场扫描成像测量系统及杂波抑制技术
电磁散射重点实验室研制了一套直线扫描的雷达近场成像测量系统,实现目标回波扫描测量、散射源成像定位及RCS重构. 雷达近场扫描成像测量系统如图1所示,主要包括主控分系统、信号收发分系统、扫描架分系统、天馈分系统、数据采集及处理分系统和目标支撑分系统. 其中扫描架分系统则要完成水平向、高度向的精密扫描,在进行水平向扫描时,天馈分系统沿水平导轨在x轴方向移动,在进行高度向扫描时,水平导轨与天馈分系统一起在z轴方向移动;目标支撑分系统主要包括泡沫支架等. 测量系统完成一次水平扫描则可以得到目标的一幅二维雷达图像.
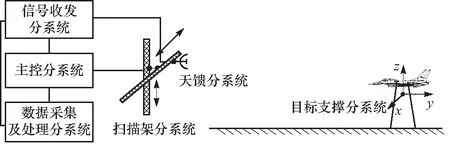
图1 雷达近场扫描成像测量系统示意图Fig. 1 Schematic diagram of linear scan indoor near-field RCS measurement system
在对目标进行近场平面扫描模式测量时,目标架设不高,约1~2 m,测试距离为100~500 m,在此过程中,地面环境杂波、目标与地面的多路径散射等是主要的干扰源,需要采取方法对杂波抑制处理. 由于目标回波与地面杂波、多路径杂波进入接收机的时间接近,采取距离门选通方法效果不佳;矢量背景对消可以消除一部分地杂波,但无法抑制多路径杂波. 此外,在直线扫描的测试模式下由于场地杂波源相对雷达系统存在相对运动,也无法采取零多普勒处理对环境杂波进行抑制.
基于以上原因,本文在研究中针对直线扫描近场测试的特点,提出了一种基于InSAR高程测量原理的杂波抑制方法. 这种方法通过散射中心高度与回波相位的关系,得到各个散射中心的高度信息,并基于目标高度范围的先验信息,设置高度向滤波器进行滤波,从而实现抑制场地杂波、提高测量精度的目的.
2 基于InSAR测高原理的高度向滤波
InSAR技术最初应用于合成孔径雷达对地观测领域中[23]. 后来,不少研究者基于InSAR原理提出了在转台运动模型下的三维雷达成像技术,利用天线在不同高度下得到目标的矢量雷达图像,再通过逐像素相位解缠处理,以获取散射源高度向信息[24-28]. 借鉴上述思想,本文对直线扫描模式下的如何获取散射中心的高度信息进行理论推导.
首先定义x,y,z分别对应横向、纵向和高度向. 目标A是位于(x0,y0,z0)的理想点散射源. 直线扫描测试中,天线沿平行于x轴的轨迹运动,行程范围为[-Lx/2,Lx/2]. 天线导轨与坐标系原点o的距离为R0,两次扫描,导轨的高度为h1和h2. 坐标系定义及测试场景具体见图2所示.
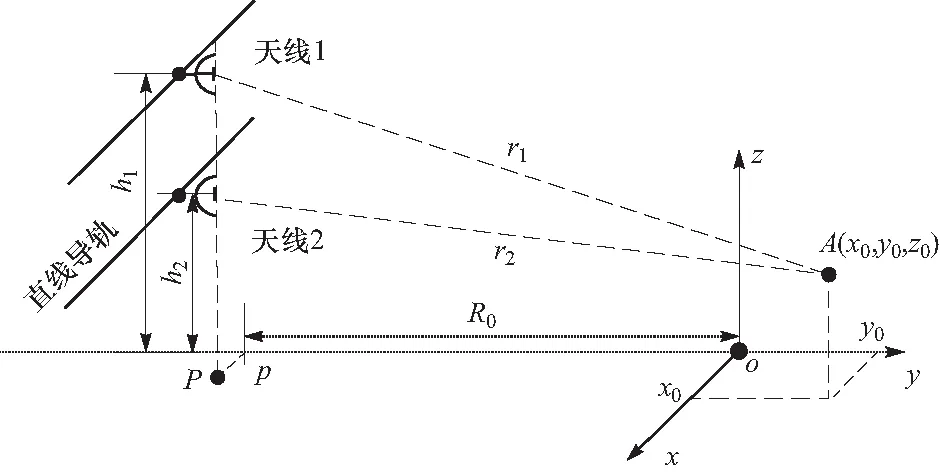
图2 直线扫描模式InSAR坐标系几何位置关系Fig. 2 Geometry of linear scan InSAR
设天线1运动到位置P,P坐标为(p,-R0,h1),它与目标A的距离r1表示为
(1)
在测试中,一般测试距离远大于目标的尺度,即R0≫x0,R0≫y0,R0≫z0,则将式(1)用泰勒级数进行展开,得到:
(2)
同理,对于天线2有
(3)
两天线到点A的距离差为|r1-r2|,根据回波相位与距离的关系可得,两次测量得到的点ARCS矢量的相位差Δφ为
(4)
式中λ为雷达波的载频.
将式(2)(3)带入式(4)中,即可得到散射中心A的高度坐标值z0与两次测量相位差Δφ关系为
(5)
式(5)表明,利用不同高度天线对同一目标进行直线扫描测量成像,利用对应散射中心的相位信息可以计算得到目标散射中心高度坐标值.
处理流程为:首先,需要在不同高度下通过连续直线扫描测试获取目标的两幅雷达二维图像img1和img2;然后根据两天线高度差、测试频率信息、距离信息及img1和img2中散射源的相位信息解算高度信息;再根据目标已知的高度信息,设置高度向空间滤波器,根据散射源高度信息对散射源进行滤波;最后,利用滤波后的散射源重构目标RCS,即完成杂波抑制处理过程. 流程图如图3所示.
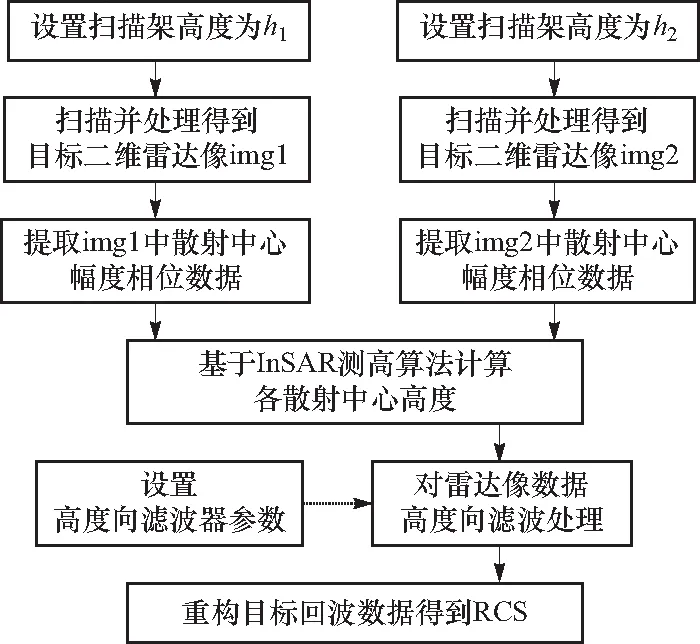
图3 基于InSAR的直线扫描近场RCS测试杂波抑制方法流程图Fig.3 Flow chart of the InSAR based clutter suppression method for linear scan RCS measurement
利用相位差计算估计距离或高度信息时如果距离范围过大会出现距离模糊的问题,因为干涉相位的真实值是以2π为周期缠绕得到的. 目前在InSAR技术领域,有诸多解相位缠绕的算法,它们多是基于SAR图像中各个像素的高度值相关性强、一般连续变化特点而设计的[29]. 但对于飞机、车辆等目标的RCS测试,由于目标各散射中心相对独立、且高度是不连续,所以不易使用解缠绕算法.
另一方面,由于飞机、车辆等目标的高度都在几米左右,利用式(5)通过合理设定目标的测试距离和两次扫描的高度差h2-h1,可以保证得到目标区的相位差在0~2 π之间. 由式(5)得
(6)
所以当
(7)
时,可以满足|Δφ|<2π,不会出现相位缠绕的情况. 值得注意的是,由于相位缠绕,折叠到目标区内的杂波难以滤除.
由式(7),对于X波段,设波长为3 cm,当测试距离R0为100 m,扫描天线高度差|h1-h2|为10 mm时,不模糊高度范围可达150 m,完全满足对飞机和车辆等测试需求.
3 仿真及实验验证
3.1 点源仿真验证
用仿真数据对本文所提出的杂波抑制方法的实际效果进行验证. 仿真计算目标为3个理想点目标,频率设置为6~8 GHz步进20 MHz,天线行程-2~2 m,位置步进4 cm. 目标与雷达距离20 m,两次扫描雷达的高度差为5 mm,目标空间位置及散射强度在表1中列出. 为模拟实际测试环境中的背景杂波,在对目标回波进行仿真计算时添加了300个位于成像区域(3 m×3 m)内高度在±5 m内位置和强度均为均匀随机分布的背景噪声散射点,散射点的强度均值为-18 dBm2,如图4所示.

表1 仿真计算点目标坐标与散射强度Tab.1 Coordination and scattering intensity of the target points
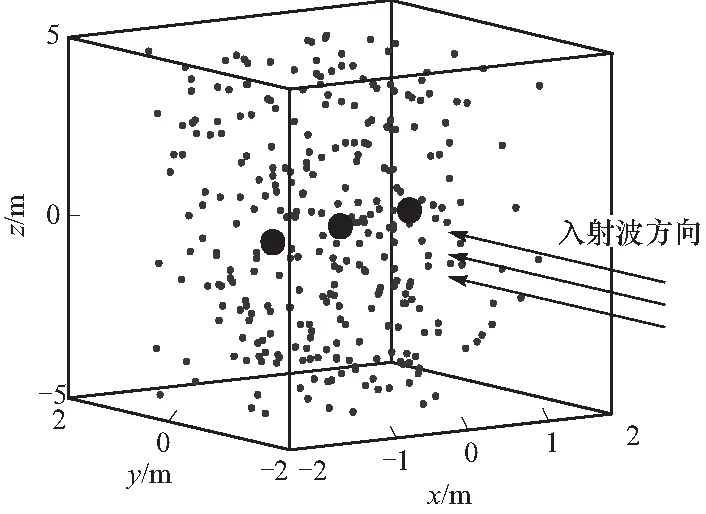
图4 仿真计算的目标(大)与背景散射点(小)的空间位置分布Fig.4 Distribution of the simulated target and clutter point
由于背景噪声散射点的影响,二维成像结果中除了目标之外,还出现了明显的背景杂波,如图5所示. 图5中,色阶的量纲为dBm2.

图5 第一次和第二次扫描测试得到的二维成像图Fig.5 2D radar image of the first and second scan measurement
利用图5中的两幅二维像进行干涉处理,计算各散射中心的高程图如图6所示. 从图中看到处理后各散射中心在±5 m高度范围内的分布情况. 根据表1目标几何位置分布情况,设置高度向带通滤波器的通带范围为-0.6~0.6 m,滤波结重构后其二维成像结果如图7所示,图7色阶的量纲为dBm2. 从重构数据二维像看,目标散射中心强度无明显变化,目标区内背景杂波基本被抑制.
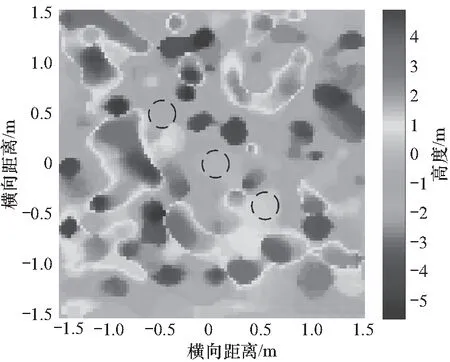
图6 散射中心高度图Fig.6 Image of scattering center’s height
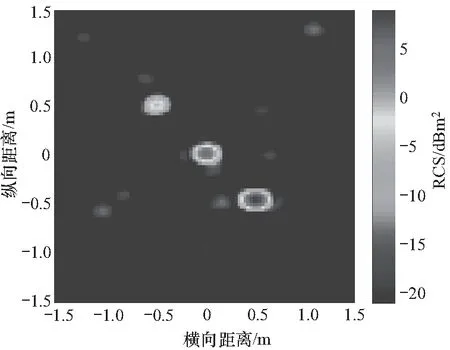
图7 滤波重构后二维成像结果Fig.7 Reconstructed 2D image after scattering center filtering
图8为背景杂波抑制前后天线位于扫描孔径中心位置(x=0 m)的扫频RCS曲线的对比. 从图中可见,经过高度向滤波处理,有效抑制了背景噪声,处理后目标RCS曲线更加接近理论值. 表2中给出了高度向滤波处理前后RCS误差变化情况,从中可以看出,RCS均值误差由1.56 dB减小为0.21 dB,均方根误差(逐点对比)由4.83 dB减小为2.38 dB.

图8 滤波后重构RCS扫频曲线对比Fig.8 Comparison of theoretical, measured and reconstructed RCS

表2 散射源高度向滤波处理前后目标RCS误差统计
3.2 飞机模型的测量实验
利用扫描系统对某飞机缩比模型开展试验研究. 飞机模型长度0.56 m,宽度0.49 m,高度0.12 m. 该模型左右机翼下各有两个发动机. 模型用泡沫支架支撑于水泥地面,支架高度为1 m,扫描架行程范围-1~1 m,目标中心距扫描架距离为4 m;扫频测试频率9~11 GHz;两次扫描天线高度差为5 mm. 得到飞机二维雷达像为图9所示,图中色阶量纲为dBm2. 飞机的强散射中心包括机头、发动机和尾翼部分,由于从头部观测,机身中间部分被遮挡,因此该部分的散射贡献较低. 地面除镜面散射外还会产生一定的后向散射回波进入接收机,而飞机模型与地面的多路径散射也会对目标回波数据产生影响,所以图9中的背景杂波强度较高. 此外需要特别注意的是,图9中在飞机真实散射中心的后方出现了由于地面多路径反射造成镜像回波而产生“虚像”,图中已用虚线标示出. 根据设定的系统参数可以计算得到,目标真实像与虚像的雷达径向距离差约0.35 m,与图中成像的结果一致. 飞机模型真实像的高度为1 m,虚像的雷达视向高度为-1 m,所以可以通过高度向滤波器消除虚像,如图10所示,图中色阶量纲为dBm2. 图11中展示了天线位于中心位置(x=0 m)的扫频RCS曲线对比,其中实线为竖向滤波处理前的RCS测试数据(经过距离门滤波预处理),虚线为经过高度向散射中心滤波处理后提取的目标RCS数据,点划线为分离的背景杂波. 由于杂波源的几何尺寸相对目标更大(整个成像区域),因此,远距离散射中心的干涉效应使其RCS在频域上相对目标RCS体现为快起伏特征. 其中提取的目标RCS均值为-10.32 dB,背景杂波均值为-8.21 dB. 说明在当背景RCS量值与目标相当时,该方法依然可以准确地分离、提取目标散射信息.
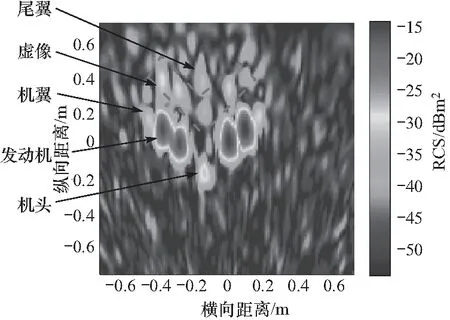
图9 飞机模型二维雷达成像测试结果图Fig.9 Measured 2D image of a scaled aeroplane model
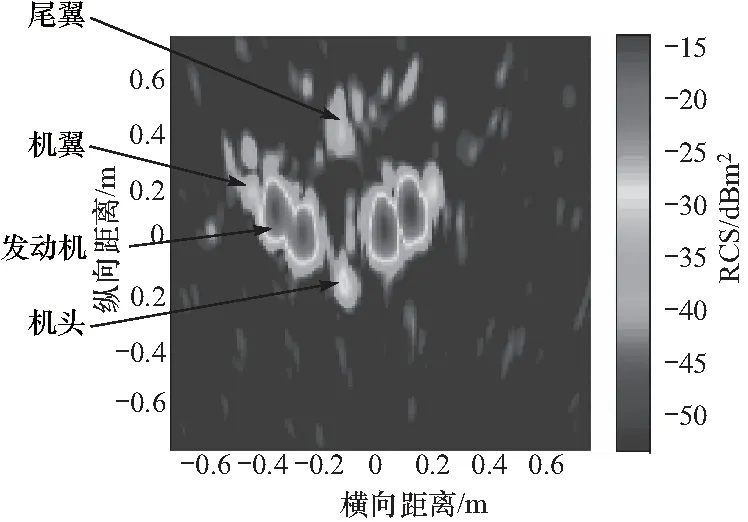
图10 背景杂波抑制后雷达二维成像图Fig.10 2D image of scaled aeroplane model after clutter suppression
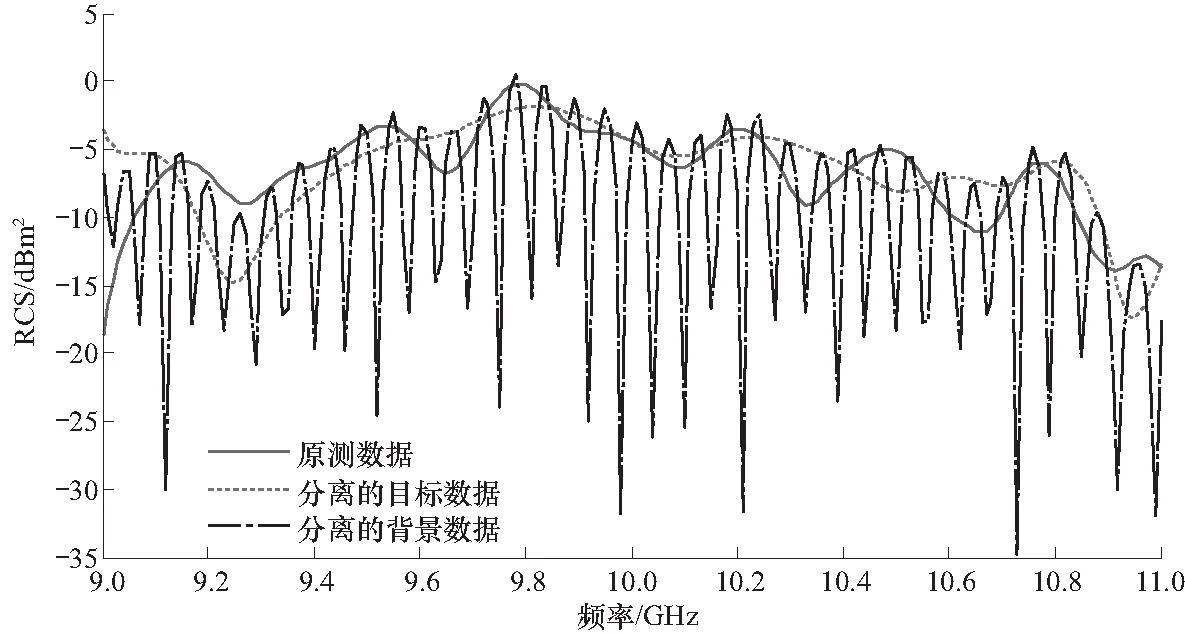
图11 杂波抑制前后飞机RCS扫频结果对比图Fig.11 Comparison of the sweep frequency RCS of the scaled aeroplane model before and after clutter suppression
4 结束语
基于InSAR测高原理,提出了一种面向宽带 RCS测试的杂波抑制方法. 首先通过设置不同的天线高度,扫描得到目标的二维雷达像并提取散射中心的相位,联合处理两次测量的散射中心相位数据,解算出各个散射中心的高度,再通过高度向的带通滤波,滤除目标高度范围外的噪声,最后重构得到滤波后目标的RCS. 该方法能有效剔除地面杂波,仿真和实验结果表明该方法有效. 该方法除适用于直线扫描系统外,对转台目标的ISAR成像、对地平面场宽带测试等都能适用. 其优点是处理算法简单,对散射中心高度信息的估计精度要求不高,对地杂波抑制效果好. 缺点是落在目标高度范围内的杂波仍无法滤除,而且若杂波产生的散射中心与目标本体的散射中心在雷达二维图像中处于同一分辨单元,用文中方法难以滤除.