智能变电站二次设备安装工况在线巡检系统设计
2021-09-13韩建波
韩建波
(国电南瑞科技股份有限公司,江苏 南京211106)
作为监测电气装备状态的基础手段,实施智能巡检可以及时发现电气设备中存在的故障隐患,对于电网设备的持续、可靠、经济、安全运行有重要意义。在本课题中,主要针对智能变电站二次设备安装工况的巡检问题进行研究,以实现二次设备安装工况的精细化管理,保障二次设备能够经济、稳定、安全地运行,因此设计一种智能变电站二次设备安装工况在线巡检系统。
对于智能变电站二次设备安装工况在线巡检系统方面的研究,国内外均十分重视。美国早在20世纪80年代就完成了二次设备安装工况巡检方面的实用化研究,很多电力公司都实现了二次设备安装工况的智能巡检。有学者提出一种基于嵌入式技术的智能变电站二次设备安装工况在线巡检系统,我国对于该系统的研究也在不断推进,并取得了很多实用性较强的研究成果。有学者提出一种基于GPS技术的智能变电站二次设备安装工况在线巡检系统并获得了广泛应用。基于这些已取得的研究成果,设计一种新的智能变电站二次设备安装工况在线巡检系统。
1 系统设计
1.1 设计数据传输模块
数据传输模块主要利用TC35单片机实现在线巡检中的GPRS通信功能[1]。所使用的单片机是一种GSM模块,支持中文信息,是一种工业级单片机,具体技术参数如下:
最大下载数据速率为85.6 kbit/s;最大上传数据速率为42.8 kbit/s;
四 频:PCS 1900、DCS 1800和EGSM 900、GSM 850中能够自动搜寻的4个频段。并且这4个频段符合GPRS Class 10+GSM Phase 2 I 2;
正常工作温度:-30~+80℃;
SLEEP模式下的电流为0.9 mA;
灵敏度<-107;
工作电压3.5~4.2 V;开机电压>3.5 V;
支持串口复用功能,该功能符合GSM 07.10协议;支持2个串口,1个下载串口,1个AT命令口;
支持模拟音频、数字音频,支持AMR、FR、EFR、HR语音编码;
AT命令支持TCP/IP命令接口与标准AT接口;
尺寸为22.8 mm×16.8 mm×2.2 mm。
1.2 设计GPS定位模块
GPS定位模块主要通过GPS定位芯片进行系统设备定位[2]。选择的GPS定位芯片型号为SKG09BL,该芯片同时支持有源、无源天线,通信接口类型为UART,可达1 m的定位精度,灵敏度可达-165/-148 dBm,速度精度为0.1 m/s,支持多种短信息模式,其尺寸为22.8 mm×16.8 mm×2.2 mm,工作温度为-40~85℃。
该芯片共由7部分电路构成,具体包括外围电路、设置通信跳线电路、下载口电路、电平转换电路、显示电路、单片机电路以及稳压电路,通过GPS调试软件能够对芯片的数据进行直接输出。
1.3 设计智能巡检机器人模块
在智能巡检机器人模块中,设计了适用二次设备安装工况巡检的智能巡检机器人。该智能巡检机器人是系统采集设备安装信息数据、进行移动巡检作业的载体[3]。设计的智能巡检机器人由外壳、充电单元、承载底盘、驱动部分等构成,重量约为80 kg,可达1 m/s的行走速度。该机器人的外壳选择高强度金属材质,每台机器人可以进行10 h左右的连续巡检,机身设有低电量充电点自动返回程序,实现完全的智能化巡检。
设计的智能巡检机器人最远可以实现2 km的信息传输,通过双视云台进行监控,机身配置了30倍变焦、1080 P可见光相机以及热成像仪红外云台,所配置的硬件设备可以充分满足智能变电站二次设备安装工况的巡检需求[4]。其驱动部分能够实现机器人的作业定位和现场作业移动,以及保持机器人移动时的爬坡能力和行驶速度。
该机器人可以实现以下功能:数据分析、识别设备安装状态、读取仪表数值以及红外测温。
该充电房内置电池并且设有充电接口,机器人通过与该充电接口进行直接接触即可进行充电[5]。充电房内还设有机器人停放处,机器人在充电时和停运时可以在充电房中安全停靠,同时充电房还能够起到避雨、防晒、防风的作用。
1.4 设计数据库模块
数据库模块可存储二次设备安装工况巡检数据进行存储,涉及巡检项、巡检项分组、巡检任务、设备、设备安装情况、用户等数据表模型[6]。其中二次设备的数据表如表1所示,巡检任务数据表如表2所示。

表1 二次设备的数据表
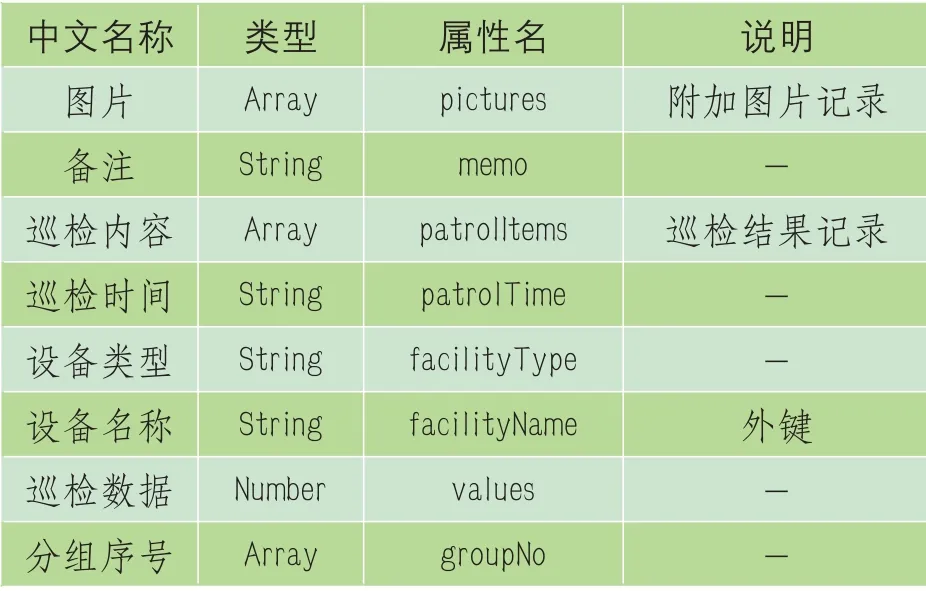
表2 巡检任务的数据表
1.5 设计巡检软件模块
巡检软件模块用于机器人后台控制、巡检数据处理以及巡检任务制订、分配等,是系统的后台软件模块。巡检软件为移动巡检App,同时支持iOS和Android操作系统,具有在线升级、版本检测、用户退出、登录、注册等功能。在该App中,用户可进行拍摄照片压缩比、采集终端对应IP地址等参数的设置[7]。该App还支持以智能变电站二次设备的类型为依据,查询设备参数,能够新建巡检任务,并向智能巡检机器人分配任务,以及对照片、日期、布尔量、数字、文本的巡检数据进行处理,支持历史记录、备注信息等多种数据的查询。
2 系统测试
2.1 实验现场与设备布设
以某智能变电站二次设备安装工况为例,对设计的智能变电站二次设备安装工况在线巡检系统进行性能测试。
通过采用设计的智能变电站二次设备安装工况在线巡检系统,对设备安装现场进行设备安装工况巡检,总共布设20个智能巡检机器人,并在现场安装2个机器人充电房供机器人充电,平均每个充电房分配10个机器人。
通过移动巡检App针对现场设备数量以及安装工况对巡检任务进行制订,并向各个机器人进行巡检任务的分配,开始进行巡检实验。
在智能巡检机器人运行前,须保持场地平整,并在晴朗天气下运行机器人,避免在极端天气下运行机器人。
2.2 实验测试
实验主要对变电站二次设备安装工况在线巡检系统的巡检点位偏离情况和设备巡检的覆盖率进行测试。
首先测试系统的巡检点位偏离情况,具体测试结果如表3所示。在测试中将现有的两种方法作为对比测试方法,分别为基于嵌入式技术、基于GPS技术的智能变电站二次设备安装工况在线巡检系统。
根据表3的测试结果可知,基于嵌入式技术、基于GPS技术的智能变电站二次设备安装工况在线巡检系统有一定的巡检点位偏离问题。而设计的智能变电站二次设备安装工况在线巡检系统仅有轻微巡检点位偏离现象,须对智能巡检机器人进行调试,更精确地对巡检点位进行巡检。

表3 巡检点位偏离情况具体测试结果 m
对系统的二次设备安装工况巡检覆盖率进行测试,测试结果如图1所示。在测试中同样将基于嵌入式技术、基于GPS技术的智能变电站二次设备安装工况在线巡检系统作为对比测试系统。
图1中测试结果表明,在巡检场地面积不断增加的情况下,设计系统能一直保持较高的设备巡检覆盖面积,在巡检场地面积为250 m2时,系统能够实现241.1 m2的设备巡检覆面积,也就是说系统在巡检场地面积较大时依然可以实现很高的设备巡检覆盖率。而基于嵌入式技术、基于GPS技术的智能变电站二次设备安装工况在线巡检系统这两种对比系统在巡检场地面积增大时设备巡检覆盖率都逐渐降低,表现逊色于设计系统。实验证明,只有设计系统保持了较高、较平稳的设备巡检覆盖率。

图1 设备巡检覆盖率测试结果
