图书馆书籍精准定位引导机器人
2021-09-11谢超
谢超
(株洲长远智造股份有限公司,湖南 株洲 412000)
1 概述
图书管理系统属于流动管理系统,图书的整理与盘点是十分重要的一步。图书馆中的书会被有需要的人进行借阅浏览,若在馆内进行翻阅则会存在读者使用后归还错书架的情况,若借出馆外甚至还可能出现书籍受损或者丢失的意外,无论何种情况,图书馆内的实际存书数目与馆藏数据对应不上。这种情况的出现不仅影响图书馆的正常运用以及管理,也会影响到读者的使用体验。因此,定时并且快速清点馆内图书是现阶段图书管理方面的一个亟需解决的问题。
智能图书管理系统是智能和数字图书馆服务的全面集成。机器人技术为智能图书馆的发展带来了新的机遇和挑战。机器人技术可以应用于图书馆智能立体声图书馆,书籍处理,小册子,书籍自动访问,书籍扫描,智能咨询,远程阅读,特殊人口服务等,实施图书馆管理情报和服务智能,从根本上提升图书馆管理和服务的效率和质量。
2 主要方案
研究提出了一种全新的取书的方案, 并将研制出一种高效率、节省人工、错误率低的全自动多功能图书馆取书机器人。机器人通过APP 界面从使用者处获得相应的书籍信息,然后与图书馆数据库建立连接,结合RFID 技术获得书籍的具体位置信息,采用麦克纳姆轮以提高机器人运动的灵活性,采用雷达实现无轨导航避障引导器人到达支架的位置,通过图像识别判定书籍位置,结合步进电机驱动移动平台使机械手小范围的移动,进一步确定书的位置,然后通过步进电机结合插补算法精确控制实现机械臂的升降,利用机械手配合拨书手指完成取书。
3 关键技术
信息的完整读取和精准定位。通过射频识别技术与机器人结合可以帮助机器人获取更多的信息,实现自动化智能化,以解决由于金属书架、信号干扰、书籍厚薄情况等因素导致的读取书籍信息和准确定位难的问题。
图书的完好和稳定取放。图书馆中各种类型的书籍厚薄情况不一,取书通过自适应手爪,根据书籍厚薄情况调整参数,以保证书籍的完好和稳定取放。
自主定位与无轨导航。对于机器人的运动轨迹,为了使机器人能够在馆中完成清理图书,清点图书,寻找图书的工作,采用激光雷达实现机器人自主定位与无轨导航。
机器视觉与人工智能。通过深度学习对书籍进行准确识别;采用ocr 文字识别及语义分析实现特殊人群阅读服务;利用分类器对使用者数据进行处理,实现APP 中书单推荐等功能。
机器人的机械系统分为机械臂三轴移动平台、底座运动机构以及执行机构,这三者均由电机驱动模块驱动。底座运动平台包括安装在平台上的激光雷达,执行机构包括摄像头和结合了拨书手指的机械爪。控制系统由STM32 与工控机构成,通过摄像头控制系统与机械系统进行交互。
4 方案实现
4.1 底座运动平台。针对图书馆紧凑的书架排列环境和取书需求,考虑到整个系统的平衡性和机动性,采用了麦克纳姆轮作为驱动轮,相比于传统的轮式机构,可以基本实现零转弯半径,能够在图书馆狭小的馆内环境的灵活运动。具有运动平稳、移动效率高和控制简单的优点。
麦克纳姆轮是基于轮子中心轮的原理,并且成角度的外围轮轴将车轮转向力的一部分转换为车轮方法。依赖于各个轮子的方向和速度,最终合成合成载体,从而确保该平台可以在不改变其自己方向的情况下在最终协同载体的方向上自由地移动。
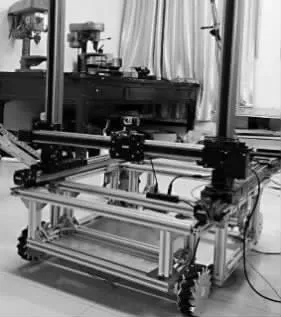
图1 机器人实物照片
从滚轮速度到车轮速度的计算:

其中,uw表示轮子速度,u||表示沿辊子方向的速度,ux表示轮子轴心运动速度X轴分量,uy表示轮子轴心运动速度Y轴分量。
根据图2 所示a 和b 的定义,有

图2 麦克纳姆轮运动分解图

其中,utx表示X轴运动的速度,即左右方向,定义向右为正;uty表示Y轴运动的速度,即前后方向,定义向前为正;a 和b 分别代表轮子与轴心的横向距离与纵向距离。

图3 麦克纳姆轮实物图
综上,可根据底盘运动状态解算出四个轮子的转速:

其中,ω 表示Y轴自转的角速度,定义逆时针为正;uω1、uω2、u ω3和uω4分别表示四个轮子的转速。
4.2 无轨导航。响应于图书馆室内环境,使用LS TOF 激光雷达,并且在空间位置的位置平面的点云信息在二维平面中实时产生360 度,利用SLAM算法实现实时建图、定位和导航功能。在测距处理期间,脉冲调制激光透射红外激光信号,该激光信号被照射到目标对象,其由图像采集处理系统由一组光学透镜接收。在内嵌信号处理模块实时决定之后,从通信接口输出目标对象的距离值和雷达,以及相对方位角值。随着机械旋转模块的驱动,其高频磁芯测距模块将旋转时钟,从而实现360 度的扫描周围环境。
4.3 图书信息的获取。目前大多数图书馆内使用的是图书码是一维条码,这种一维条码仅对图书进行标识,并没有包含多少信息,若运用机器人进行精准管理,则需要获取到更多的细节信息。并且,在扫描条码的过程中,机器人势必要进行无障碍的直接扫描条形码,不然信息存在误差。RFID标签能够在阅读器的功用范围内被读取可以有效防止障碍物遮挡导致的识别难题,同时还能够消释上磁、消磁及磁条磁性弱化等问题。
基于以上情况,将采用图像识别技术进行书籍的识别工作,从而实现书籍快速准确抓取。
4.4 三轴移动平台。针对机器人取书的实际情况,通过实际分析,为了实现对目标自动跟踪定位,将采用三轴移动平台。三轴是在三维立体空间的环境下,通过长、宽、高即X轴、Y轴、Z轴三个轴对物体进行控制和定位。针对三轴平台精确定位和稳定运转的需求,采用了直线差补算法配合三轴平台进行取书操作。三轴运动平台和线性插值算法的组合不仅可以提高系统的稳定性和准确性,而且可以实现负载的高速和精确定位。
4.5 图像识别技术。因为图书馆室内书籍众多,提出一种解决方案:采用摄像头获取图书图像,经过图像处理从书籍中识别出目标书籍,获取其位置信息,进而完成取书。
首先通过使用安装在横轴上的摄像头捕获图像信息。再通过图像处理获取寻找目标书籍,机械爪移动到指定位置完成取书作业。图4 为图像采集流程,主要采用了Canny边缘检测边缘信息,HSV颜色空间提取图像书籍标签,霍夫变换提取书籍轮廓的方法。
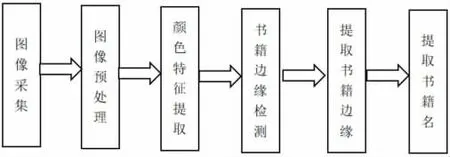
图4 图像采集流程
通过三轴移动平台上的摄像头获取图像利用上述算法进行处理。HSV颜色空间的模型对应于圆柱坐标系中的一个圆锥形子集。再对摄像头捕捉图像进行霍夫变换。

图5 工作场景图
5 应用前景
本图书馆机器人是针对大量密集型资料的精确、高效的查找机器人。目标市场以公共图书馆、高校图书馆、社区图书馆等机构为主。并与各类图书馆取得深度合作之后,可以各类图书馆为中心,打造一整套图书馆信息管理系统,将使用者纳入其中,为使用者提供更加完善的服务。应用范围可分为两类:一类是一定规模以上的公共、高校、社区图书馆;另一类是规模较小的县级以下公共图书馆,中小学图书馆以及社区图书馆。根据使用者人群以及需要的不同,机器人会在型号大小、外观和功能设计上有一些差别。
