一种基于非线性滤波器的激光致声信号识别方法
2021-09-11王永超
王永超 韩 东 李 利
(海军大连舰艇学院,辽宁 大连 116018)
1 概述
近年来,随着海洋活动日益增多,水声通信的应用日益广泛。激光致声技术作为一种新兴的水声通信技术,在水下数据传输、水下机器人遥控、水文数据采集等领域都有广泛的应用。其原理是利用激光束照射水面,当激光的能量和功率超过某一阈值时,会在水中产生声波[1]。
如果对激光的作用时间进行控制,使其以固定的时间间隔向水面照射,就能够在水中产生周期性的声波脉冲信号,通过编码就可以实现信息在水下的传输。在接收端,接收器对每个约定的时间间隔进行检测,如果检测到声波脉冲则判定为收到码元1,如果未检测到声波脉冲,则判定收到码元0,进而实现水上与水下的通信。
2 波形识别方法
由于激光脉冲的作用时间极短,因此这段时间在分析中可以忽略不计[2]。激光脉冲作用于水面后,会使水中在极短的时间内产生一个声波脉冲信号,该信号的振动幅度随时间衰减(图1)。

图1 激光致声信号
根据声波脉冲信号的时域波形特点,可以利用非线性滤波器对信号滤波,从而得到各个脉冲信号在时间轴上的起始位置。在后续分析中可以根据识别到的时间轴位置信息确定连续两个声波脉冲信号的时间间隔,进而判断其间是否存在码元0并实现译码。下面介绍利用非线性滤波器对声波脉冲信号的进行识别和定位。
2.1 信号预处理
在接收器采集信号的过程中,环境背景噪声、系统噪声都会对接收信号产生影响,进而干扰后续的分析结果。另外,在分析过程中往往并不需要采集信号的全部信息,在很多情况下只需提取信号中的部分信息即可完成分析,因此在分析前需要对信号进行预处理。
2.1.1 去基线
2.1.2 信号取绝对值
去噪信号s 能够反映激光作用于水面后产生的声波波形,通过对s 进行识别,能够确定每个激光脉冲作用于水面的时间。从图1 中可以看到,短时间内声波信号快速上下震荡,但信号的幅度变化不大,在识别过程中需要用到信号的幅度信息,所以要去除信号在震荡中符号的影响,因此对s 取绝对值,得到信号的幅度信息|s|(图2)。
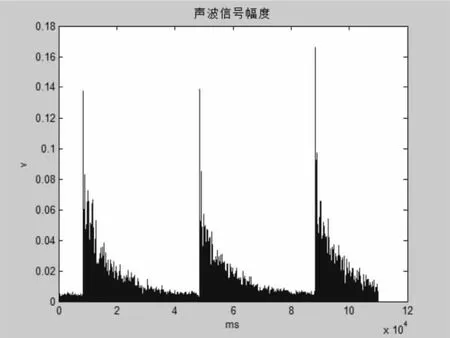
图2 信号幅度
2.2 非线性滤波
声波信号在时域波形上区别于背景噪声,通过设计非线性滤波器对其特征进行提取,当一个滤波器窗口内的各个特征都符合预设阈值时,即认为当前窗口中存在一个由激光引发的声波脉冲信号,进而根据这些特征在时间轴上的位置确定声波脉出现的时间。
2.2.1 滤波器设计
非线性滤波器对窗口内的信号进行非线性滤波,从而提取需要的特征,特征的选取由信号本身的特性决定。在工程中,往往选取信号中与背景噪声区分度较大的时域或频域特征作为目标特征。通过观察图2 中的信号可以发现,每个声波脉冲在出现时存在明显的上升沿,且震荡幅度在短时间内大幅增加,之后随时间逐步衰减。该时域特点明显区别于无脉冲时的背景信号,针对这一时域特点设计非线性滤波器,并对特征进行提取。设滤波器窗口滑至第i 个采样点时,窗口对|s|截取的部分为|Wi|,截取的点数为N1,共设置三个特征:

其中M1、M2为求和区间的边界,k 为下标,a 为常系数,由实验环境、激光源功率等多种因素决定,本文中a 的值为3。

3 结果分析
利用该方法分别在实验室平静水面及海边有浪水面条件下进行了实验,实验中把声源和接收器的距离设置为5m,10m,15m,20m,25m,分别测试不同距离时算法对信号的识别率。激光器功率为3w,识别结果如表1 所示。
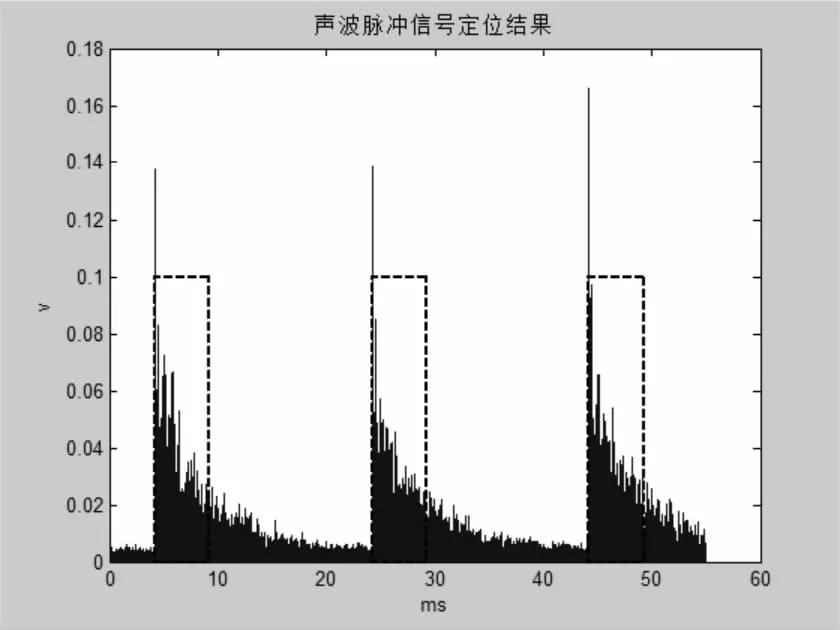
图3 声波脉冲信号定位结果

表1 不同条件下激光致声信号识别率
从结果可以看到,平静水面环境下信号的识别率高于海边有浪环境,原因是海边水下环境噪声较大,易对信号的波形造成干扰,同时水下环境比较复杂,对声波的传输造成遮挡、反射、折射等干扰,导致接收信号发生畸变,致使识别率下降。从距离因素看,由于激光器功率有限,在10m 范围内接收器能够接收到幅度较强的声波信号,在此范围之外声波信号的幅度随距离快速衰减,与平静水面环境相比,海边有浪环境下信号幅度衰减更快,所以随着信号源与接收器距离增加,识别率逐步下降。
4 结论
本文提出了一种基于非线性滤波器的激光致声信号识别方法,算法简单易于实现,对于激光致声产生的声波脉冲信号具有较好的检测及定位效果。算法的缺点是对于噪声的抗性不强,对较复杂水下环境的声波识别率较低。
