管壳式换热管机器人胀管方法的研究
2021-09-10李权


摘要:管壳式换热器制造时需要胀管工序,由于机器人和胀管机都是刚性机械,机器人胀管会出现胀管器与管孔中心不同轴碰撞或磨损。本文提供一种技术方案,通过胀管机在弹性固定器中自由移动,可以实现偏差修整,保证胀管器与管孔同轴,不發生机械损伤。
关键词:胀管;机器人;弹性固定器
管壳式换热器是炼油、化工、电力、冶金等行业中的重要设备,设备占工厂总设备投资超过40%。管壳式换热器分管程和壳程,两程分别注入温度不同的流体,两种流体通过换热管的管壁进行热交换。为防止两种流体串通,换热管与管板连接的地方需要密封,密封方式一般为胀接或胀接加焊接。胀管是管壳式换热器的重要工序,它直接影响到换热器的密封好坏和使用寿命。目前管壳式换热器胀管方法有机械胀管(滚珠胀管、液压胀管)和爆炸胀管两种,而爆炸胀管仅用于高压换热器,机械胀管占绝大多数。
一、传统机械胀管技术
机械胀管,是使用滚珠胀管器(图1)或液压胀管器(图2),对换热管管孔内壁产生一定的压力,使管子直径胀大的加工工艺。胀接后的管子产生了塑性变形, 而管板处于弹性收缩状态,管壁和管孔在胀接过程中的不均匀变形而产生的接触压力, 使管子和管板达到牢固而紧密的接触,从而消除管子和管板之间的缝隙,使管口得以密封。
传统机械胀管的操作方式为手持胀管机或半自动机械持胀管机作业,其缺点是:胀管机较重,手持劳动强度较大,速度慢,而且由于管子数量多,外形相同,很容易漏胀或重复胀,漏胀会影响换热器的密封,重复胀会减薄管壁着而降低其强度。
二、机器人胀管技术的特点
当今世界的国际经济竞争越来越成为以智能制造高端技术为支点的产业链竞争,智能制造的核心是工业机器人的应用。随着工业机器人技术及智能水平的提高,工业机器人已在众多领域得到广泛应用,中国更保持着35%的高增长率,目前中国已成为全球规模最大、增长最快的工业机器人市场。针对传统机械胀管技术的缺点,我们如果可以引入机器人技术来进行胀管作业,将可以发大大提升作业的自动化水平,减少人工工作量,避免漏胀或重复胀,提高产品质量。但是,要实现机器人自动胀管,就必须解决技术一个重大难题:管板上的管孔是使用钻床加工出来的,无论普通摇臂钻床还是数控钻床,加工出来的孔中心距都会存在偏差,而且每个孔的偏差值是不规则的,国家标准GB151《管壳式换热器》里面详细规定了允许的孔间偏差值,孔径越大允许的偏差越大。而机器人胀管采用的是标准编程,机器人设定的中心距是按图纸尺寸固定的,无法针对每个孔调整偏差。机器人和胀管机都是刚性机械,当胀管器与管孔中心不同轴,就会发生胀管器与管孔内壁机械碰撞或磨损,使管子和胀管器损伤,严重的会造成整台胀管机损坏或整台换热器报废。
三、技术方案
当前机器人胀管的技术核心,就是要使胀管器的中心与管孔中心重合,其它方面目前都有了成熟的解决方案。而胀管器的中心与管孔中心重合,理论上可以用机器人视觉识别来完成,但视觉识别在实际中常常会发生差错,这个与胀管工作的特性有关。胀管作业时,胀管器与管内壁会发生滑动或滚动接触,为减小摩擦,需要添加润滑油或其它液体,这些液体飞溅在管口上,会造成机器人产生视觉偏差。而且机器人视觉需要增加大量控制装置,会加大设备成本。
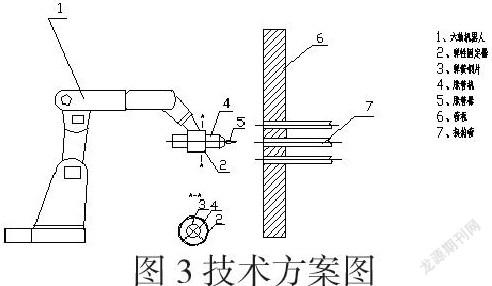
为此,我们可以采用特殊的机械装置来解决上述问题。管板钻孔加工的中心偏差最大为2-3mm,我们可以通过柔性机械装置来修补偏差,达到自动调整的目的。技术方案如图3所示:
方案中,我们在六轴机器人上安装一个弹性固定器,再把胀管机安装在弹性固定器中,弹性固定器中设计了弹簧钢片,调整弹簧钢片的力度使胀管机可以适度弹性移动,再把胀管器安装在胀管机夹头上。作业时驱动六轴机器人,使胀管器与某一根换热管同轴,编写一根管的胀管程序,调试好程度后,再按管孔的加工图纸,利用机器人平移指令编写全部胀管程序。启动六轴机器人,使胀管器的尖端插入换热管中,启动胀管机工作,随着胀管器的轴向移动,胀管机在弹性固定器中自由移动,可以有一定限度的偏差修整,保证胀管器与管孔同轴,不发生机械损伤。
弹性固定器的具体结构见下图:
原理说明:机器人法兰1和弹性固定器外圈5通过法兰连接并固定,使弹性固定器可以随着机器人移动。胀管机2和弹性固定器内圈通过紧固螺栓7固定。弹性固定器内圈和外圈通过弹簧片4连接,弹簧片4一端固定在内圈,另一端固定在调节螺钉3上,通过松紧调节螺钉3来调节弹簧片4的拉力,胀管机2重就需要调节螺钉3调整紧。这个结构使机器人1与胀管机2保持弹性连接。
机器人与换热管对准的方法分二步,首先是机器人通过示教操作,使胀管器与管板垂直,二是根据管板上的管孔图纸尺寸进行定位,可以使机器人对准换热管的理论位置。胀管器的尖端很小,可以顺利进入管孔,随着胀管器的深入,胀管机整体因为弹性固定器的修补,也会与管孔同轴,避免了机械碰撞和摩损。
四、结论
本方案可以很好地解决机器人胀管中心定位的关键技术问题,其结构简单可靠,设备制造和运行成本低。使用工业机器人胀管,速度快,定位准确,将大大提高工作效率,降低工人劳动强度,值得推广应用。
参考文献:
[1]工业机器人在制造业中的应用[J].黄晓辉.信息记录材料.2018(08)
[2]中国工业机器人数据统计[J].梁文莉.机器人技术与应用.2015(02)
[3]中国工业机器人产业发展研究及建议[J] 姚垠国.机器人产业2021(01)
[4]机电一体化技术应用及发展趋势探析[J].李惠强.现代制造技术与装备.2018(11)
作者简介:李权(1972.5- ),男,汉族,广东茂名市人,本科/学士(东南大学),教授级高级工程师,研究方向为节能环保技术、压力容器和热交换器研发、工业机器人技术等。工作单位为广东理工职业学院
