基于自动焊接技术的大型盘状结构件定位焊接工艺设计
2021-09-10张忠芳董航田志远赵强
张忠芳 董航 田志远 赵强

摘要:大型盘状结构件类产品在实际生产中的需求日益增加,由于其本身的结构特点,在生产中存在生产效率低下、产品质量不高等问题。本文针对上述问题,对一种大型盘状结构件(即大型电缆盘的上、下法兰片)进行分析,制定了采用机器人自动定位焊接的工艺。试验证明机器人自动焊接技术在该零件上的应用大大提升了生产效率和产品质量。
关键词:盘状结构件;机器人;自动焊接技术
中图分类号:TH162+.1;TP242.2 文献标识码:A 文章編号:1674-957X(2021)14-0032-02
0 引言
大型电缆盘目前被广泛用于矿山、建筑施工、机械制造、港口码头、路桥建设等行业,是基础设施建设的必需品,而本文所涉及的零件则为大型电缆盘的主要组成部件,即大型盘状结构件[1、2]。
目前国内还没有完整的大型盘状结构件自动生产系统,需要人工加工或者人工操作。人工组立焊接缺点是尺寸和焊接质量与设计存在偏差,导致电缆盘的使用寿命降低;同时该零件焊接量分散且焊接位置多样的特点,造成了焊接位置频繁变换、频繁起弧收弧的工艺执行难点和质量控制难点,在大批量生产时由人工组立焊接工作必然导致生产效率低下,质量成本升高[3]。
为克服上述问题,需要一种全面自动化、实用性广、操作简单、安全的焊接方式。本文采用自动焊接机器人对该零件进行组立及焊接。经试验,该工艺在批量生产中可以维持较高生产率,同时保证焊接质量,取得了较好的经济效益和社会效益。
1 大型盘状结构件工艺分析
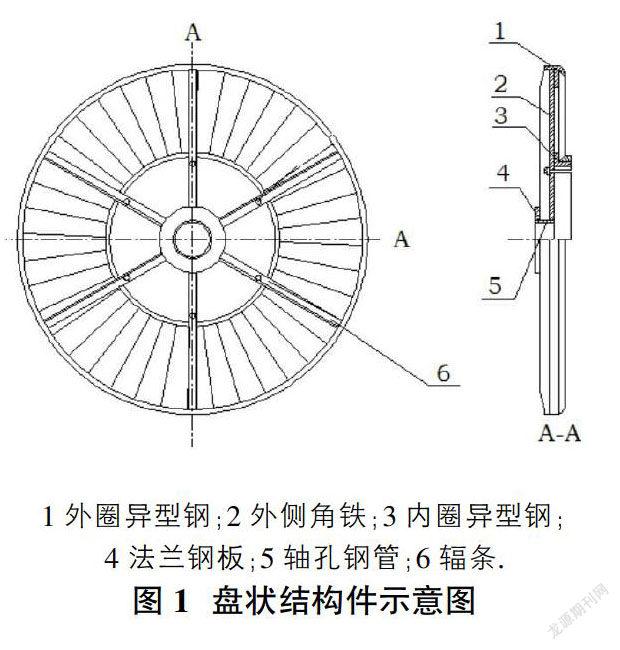
大型盘状结构件的组成较简单,主要由外圆盘形钢、辐条、内圆盘型钢等组成(如图1所示)。该结构为面积与高度比例巨大的片状零件,且为框架结构,在制造过程中高度方向上的抗弯折能力较弱。材料为普通碳钢,具备良好的焊接性能。
通过对上述结构分析,制定工艺为:对已初步加工后的内、外圈和轴芯放置并固定夹紧,将辐条送至预定位置后焊接成型。
该工艺中关键步骤为内、外圈的固定夹紧;内、外圈的中心对正;辐条的抓取及定位;整体的焊接成型。
上述工艺的难点为内、外圈和轴孔钢管的中心对正;定位后工件的正面焊接、翻转及反面焊接。该零件待焊区域分散,焊接位置受限,零件变位难度大。此外机器人焊接对初步加工后的内、外圈的外形尺寸要求比较高,否则会出现漏焊或干涉的现象。
2 机器人自动焊接系统
2.1 机器人自动焊接技术要求
①自动焊接设备需结构合理,能满足大型电缆盘及类似焊合件的焊接;需操作简便,易于维修。②自动焊接设备需运行连续有效,安全性高。设备的控制系统保证自动控制,能够自动完成正常运行时各项技术指标和功能,具备连锁功能以防误操作,能够显示和处理设备报警。③自动焊接设备需采用简易便捷的夹具设计,保证在最短的时间内上、下料和夹紧工件。④自动焊接工位设置多处急停按钮,在发生危险时,方便操作人员在工件就近位置能够迅速停止设备工作。
2.2 机器人自动焊接系统的组成
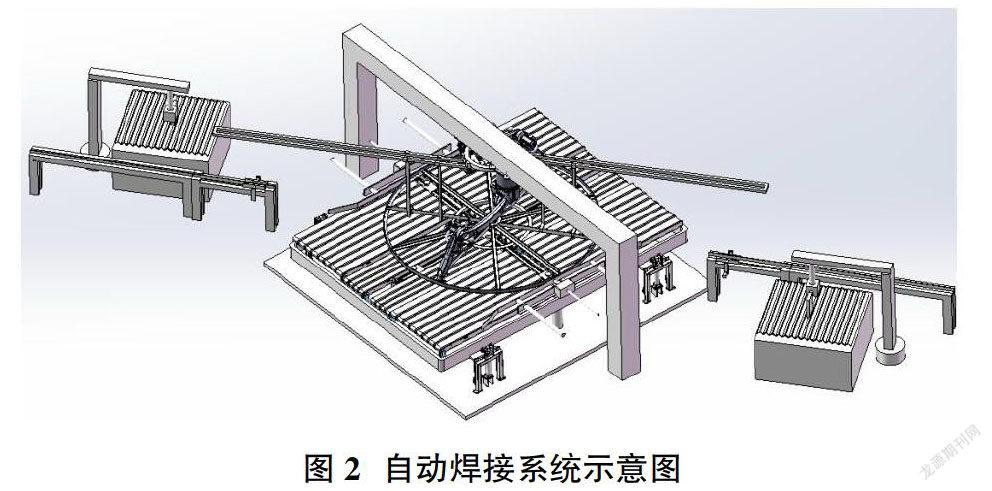
该系统主要包含焊接机器人、焊接夹具、电控系统、翻转机构(如图2所示)。
①焊接机器人。焊接机器人型号为:库卡KR8R1620;机器人工作臂展为1620mm,可满足外径1~2.2m电缆盘焊接需求。焊接机器人抓取重量为8kg,位置重复精度为±0.04mm。焊接机器人本体紧凑、灵活。焊接机器人本体图见图3。
②焊接夹具。焊接夹具用来实现工件的定位与夹紧,由电机控制旋转角度,适应不同夹角辐射角铁的焊接。焊接夹具外径最大2.2m,能满足1~2.2m法兰片固定需求。焊接夹具上设有滑动块和定位夹,滑动块通过滑槽与焊接夹具滑动连接。工作时可以实现内外圈夹紧定位,夹爪松开、夹紧及径向移动可以实现不同直径的内外圈定位焊接,并校正中心位置。焊接完成后,松开焊接夹具。
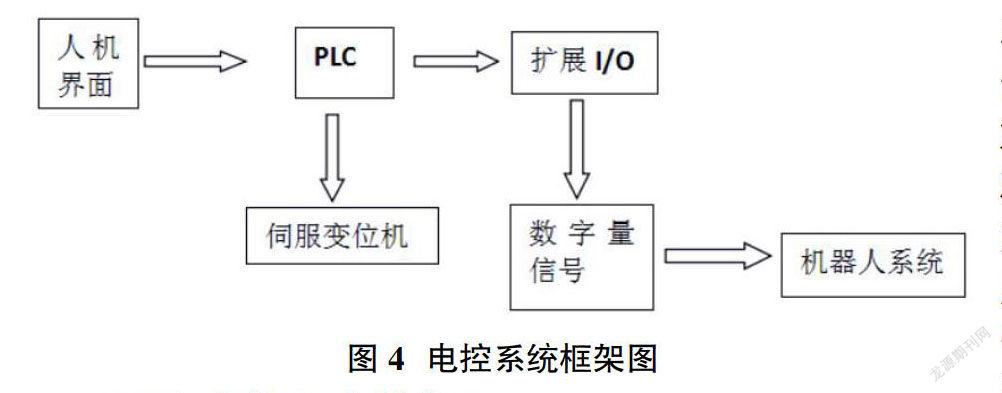
③电控系统。由于机器人自动焊接系统包含了机器人的运动控制部分和变位机翻转控制部分。因此该控制系统只需要将机器人自动焊接系统置于远程控制模式,通过数字量信号控制机器人来实现焊接。根据总的硬件需求,电控系统设计框架如图4所示。
④翻转机构。工件翻转机构由上、下传送带组成,工件完成正面焊接后,输送至翻转机构,此时,上、下两层传送带合紧翻转180°。完成翻转后,上、下传送带分开,工件由上传动带转入下一个工位进行反面焊接。
2.3 辐条抓取、上料装置
辐条叠放在物料车上,通过抓取机械手抓取辐条。由抓取机械手完成辐条位置摆放调整、旋转90°放置于滚筒输送机上,由输送机传送至焊接取料位置。
滚筒输送机上料端传送宽度为80mm,满足40×40×4、 50×50×5、60×60×6三种规格辐条传送,对辐条输送进行粗限位。
焊接取料位置设置一组导向调节机构,对辐条进行精度导向定位,其前端设置一行程限位传感器,辐条送到位停止传送;辐条取走后继续进行辐条传送。
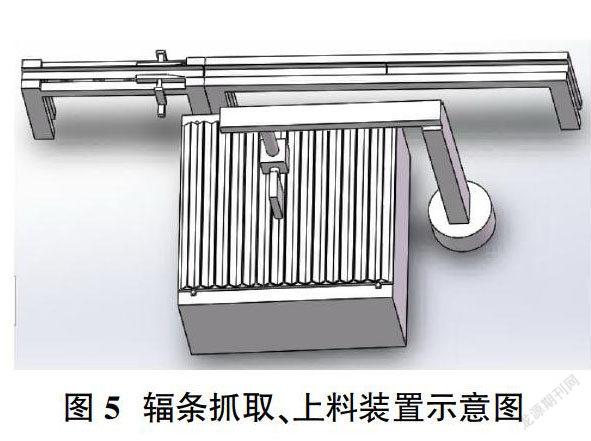
抓取机械手由前端电吸盘爪具、旋转气缸、升降电缸、直线模组及整体旋转电机等构成。通过定位坐标或结合视觉传感器进行抓取及放置辐条,根据辐条上料摆放位置,爪具抓取辐条后摆动角度45°或135°,完成角铁位置调整,机械手旋转90°后可放置于供料平台上[4]。
抓取机械手前端电吸盘爪具结构设计能满足抓取两种不同摆放位置的角铁,夹具长180mm,抓取辐条中间位置,能满足长度450~1152mm,以及40×40×4、50×50×5、60×60×6三种规格辐条抓取。
伺服机械手(三坐标式)转运辐条,转运的同时两台焊接机器人同时焊接。辐条抓取、上料装置如图5所示。
3 焊接工艺
3.1 焊接要求
工件主体材料为Q235A,焊接工艺性良好,工件重量≤300kg,材料厚度为3~6mm。工件焊前狀态:初步加工件自动上料,工装定位组对后自动调整加紧。工作站满足焊接区域:不小于?准2200mm。采用MAG单层单道焊接。焊缝形式为对接焊缝。
在实际的焊接过程中,自动焊接机器人受多种因素影响,为了保证焊接质量以及焊缝的美观性,需要调试人员对自动焊接机器人参数以及焊接工艺进行多次优化。
焊接完成不得有表面裂纹、未焊接、未融合、表面气孔、未填满和肉眼可见的夹渣等缺陷;焊缝与母材应当过渡圆滑;焊缝不得咬边。
3.2 焊接工艺
①采用CO2保护气体。采用焊接保护气体可以提高焊缝质量,减少焊缝加热作用带来的宽度,避免材质氧化。CO2保护气体适合自动焊合全方位焊接,并且成本低[5]。②焊接电源。采用负载持续率≥60%的AC380V±10%三相逆变式焊接电源。③电弧电压。电弧电压对熔池的深度和宽度影响较大。当电压升高时,焊接热量输入增大,电弧太长,会使工件上电弧覆盖面积增大,熔池的宽度和深度增加,容易产生咬边等焊接缺陷[6];当电压降低时,焊接热量减少,若电弧太短,会使工件上电弧覆盖面积减小,熔池的宽度和深度减小,焊缝会窄且凸。根据工件不同焊缝的特点选用的焊接电弧电压在17~20V之间。④焊丝。由于CO2保护气体具有较强的氧化性,固焊接材料应选择具有脱氧元素Si和Mn的H08Mn2siA焊丝,焊丝直径为1.0mm,桶装与盘装均可。⑤焊接电流。在焊接过程中,焊接电流对焊缝的形成、熔点的过渡形式以及熔覆效率均有较大的影响[7]。在反复的试验后,焊接电流取70~120A,焊接速度为10~15L/min时,焊接效果最佳。
4 分析与总结
本文针对大型盘状结构件类的产品在实际生产中效率低下、产品质量不高等问题设计制定了采用机器人自动定位并焊接的工艺。经验证得出以下结论:①提高了生产效率。单件工件采用机器人自动焊接工时为操作工1人/20min;传统手工焊接的工时为焊工1人/40min+辅工1人/10min。工作效率提升了3/5以上;②焊接质量可控性高。机器人自动焊接焊缝的宽度误差可以保证在±0.5mm内,且焊缝连续无接头,即使在拐角处也可以获得稳定的焊接质量,大大降低了后续修磨的人工成本;③该机器人自动焊接工艺可以实现在大批量生产时的连续作业,降低了劳动成本,且操作安全性高。
参考文献:
[1]王剡.自动化焊接设备在工程机械制造中的应用研究[J].中国设备工程,2020(16):126-127.
[2]彭永红.钢筒体钢木结构电缆盘的设计[J].电线电缆,2010(12).
[3]许式方,罗文森.一种大型电缆盘自动生产系统[P].中国:201510476917.3,2015-08-06.
[4]罗文森,许式方.一种自动辐条送料机[P].中国:201520586256.5,2015-08-06.
[5]张永杰,程石来,宋华修.某型号构架吊座与横梁接头焊接工艺研究[J].金属加工,2019(2).
[6]张忠科,王希靖,吴立民,等.电缆盘用异型钢闪光对焊工艺[J].焊接技术,2010(4).
[7]马静一,许爱玲,陈秀,徐军升.一种拖拉机焊接支架自动焊接工作站的研制[J].拖拉机与农用运输车,2018(3).
