基于模型预测控制的无人驾驶车辆轨迹跟踪控制算法研究
2021-09-10张钦
张钦

摘 要:为实现线性识别模型用于预测控制算法低速直线轨迹跟踪控制效果的验证,本研究利用计算机软件maplab进一步构建基于运动型模型线性时变模型预测控制算法,通过理想曲线和时间曲线的仿真比较,研究证明该算法可确保在处于一定条件下无人驾驶汽车具有良好的安全性、稳定性,能够为无人驾驶汽车国际各种算法提供经验参考。
关键词:模型预测控制;无人驾驶;车辆轨迹;跟踪;控制算法
1 国内外研究现状
在未来智能交通系统中无人驾驶机车是其重要构成,而汽车的自动驾驶系统在无人驾驶车辆控制过程中发挥重要作用,无人驾驶汽车可实现最基本要求即轨迹跟踪。基于此,本研究急需借助现代计算机、传感器技术设计线性时间模型预测控制器,能够通过前轮转向的控制以实现对无人驾驶汽车的轨迹跟踪。
2 线性识别模型的预测控制原理分析
在本研究中以线性状态控制模型作为基础,进一步推导模型预测控制方程,通过优化求解以及反馈机制进行原理分析。
2.1 预测方程
如下所示为离散线性化模型:
在该方程中n维状态变量可用x(k)表示,m维控制输入变量用u(k)表示,状态变量系数矩阵用Ak,t表示,控制变量的系数矩阵用Bk,t表示。上述方程可以发现,在处于预测时域范围内状态量以及输出量可通过系统目前状态量以及控制时域控制增量进行计算获得,即模型预测过的算法中预测功能实现。
2.2 二次规划问题转化
由于在系统控制时域中系统输入增量是未知的,通过合理优化目标函数并使该直最小化,可在系统控制时域中满足约束条件获得最优化的控制序列,如下所示为其目标函数:
在该方程中输出参考量用表示,理想的输出参考量用表示,输入增量用△u表示,权重矩阵用Q和R表示。在上述目标函数中,第1项可用于惩罚系统在Np中参量的实际偏差,其能够从一定程度上反映系统对于参考轨迹快速跟踪能力。第2项中可用于惩罚系统在Np中控制增量大小,能够从一定程度上反映系统对于控制量平衡性的要求,在实际控制时需要满足系统状态量以及控制量相关约束条件。
2.3 反馈控制
对于不同控制周期可完成上述公式求解之后,进一步获得控制时域的控制输入增量,在上述公式中t时刻的控制增量可用表示。结合模型预测控制原理,在该控制系列中,第一元素是实际控制输入增量,其可用于系统进一步获得下列公式:
在该公式中系统实际控制量用u(t)表示,在执行该控制量时系统需要执行直到完成下一时刻,在新时刻可根据状态信息重新预测在下一阶段的时域输出情况,通过优化获得新控制增量序列,循环往复,直到完成整个控制过程。
3 线性时变模型预测控制的仿真分析
3.1 仿真条件
针对无人驾驶汽车需要以坐标原点为出发点,通过期望纵向速度跟踪直线轨迹,以50毫秒作为采样时间,以20秒作为防震的总时间设定。
3.2 低速运动学模型的线性化分析
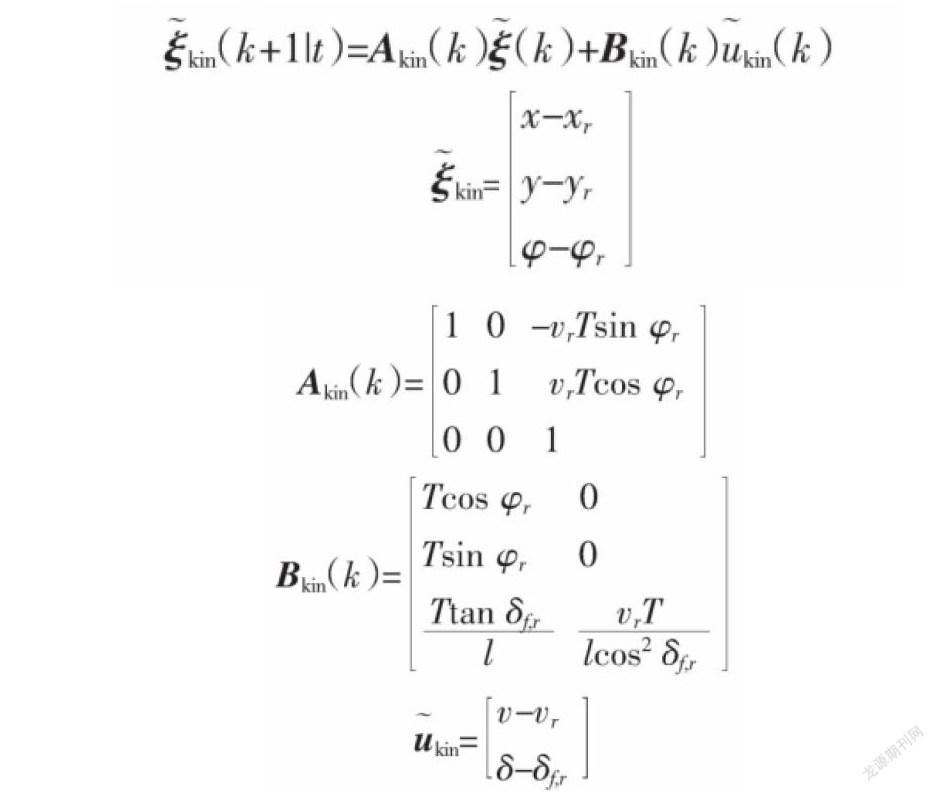
由于在本次研究中控制目标为无人驾驶汽车在处于低速条件下的跟踪情况,并因此预测模型为汽车运动学方程,在处于低速运动条件下汽车运动学方程如下所示:
在该方程中汽车后轴轴心纵横纵坐标用xr,yr表示,汽车的横向角用表示,汽车的前轮转角用f表示,汽车轴距用L表示,汽车后轴中心速度可用vr表示。通过对上述方程进行线性化,可获得线性时变模型,如下所示:
在上述公式中采用时间为T,在r点后汽车的前轮转角为f,x。
3.3 验证汽车运动学模型
为进一步验证本研究所构建的汽车运动学模型,可利用计算机软件matlab/simulink环境下构建运动学模型,并针对无人驾驶汽车处于直线轨迹时的具体跟踪情况开展仿真分析。根据结果可以发现,汽车的实际运行轨迹从原点出发可跟踪其真实的直线轨迹。同时通过汽车的横纵向位移以及前轮转角,能够从一定程度上模拟跟踪理想轨迹,最终实现稳定状态,无人驾驶控制量,纵向速度以及角加速度可获得稳定状态。
4 小结
总而言之,在本研究中利用仿制学软件搭建线性时变运动学模型进行预测,控制仿真进一步获得无人驾驶状态量以及控制量,能够反映汽车在跟踪时的过程,实际状态量可实时跟踪理想状态量的实时变化且最终趋于稳定状态,控制量也可通过一定变化获得最終稳定状态。表明在处于低速跟踪条件下,线性识别模型预测过的算法能够实时进行汽车行驶轨迹的跟踪,确保在汽车行驶中的稳定性以及实时性。
参考文献:
[1]胡家铭,胡宇辉,陈慧岩,等.基于模型预测控制的无人驾驶履带车辆轨迹跟踪方法研究[J].兵工学报,2019, 40(3):456-463.
[2]杨朝阳,陈恳,彭丽.基于模型预测控制无人驾驶车辆避障轨迹跟踪器设计[J].湖北汽车工业学院学报,2020(1):11-15+20.
