基于数据融合的虚拟现实位姿追踪系统
2021-09-10任荣琴申菊马召换王添李念
任荣琴 申菊 马召换 王添 李念

摘要:本课题针对虚拟现实应用的特点,将光学数据与IMU数据相结合,研究基于数据融合的位姿追踪系统,通过位置信息与姿态信息的相互补偿或矫正,实现更准确的姿态追踪、更平滑的位置输出以及更少的图像延迟,提升VR体验效果。
关键词:虚拟现实;数据融合;位姿追踪系统
1.引言
近几年,人们对于VR体验不断增长的期望与需求,给位姿追踪技术的发展带来了挑战与机遇,不同样式的追踪技术与设备竞相亮相。其中,光学追踪与IMU追踪是两种最常见的追踪方式。一般来说,位置追踪以光学方法为主,姿态跟踪以IMU方法为主。
通过光学、IMU以及其它相关器件,可获得多种数据(包括:位置、运动、姿态、角速度、加速度、地磁等数据),根据各种数据的特点,在算法上可取长补短,从而实现更佳的VR体验。例如,从IMU中提取加速度数据,可用于光学位置预测;再例如,从光学数据中得到运动信息,可用于IMU的姿态矫正。本课题,即是研究这种基于数据融合的虚拟现实位姿追踪算法,不同于位置、姿态分别解算,而是通过相互补偿或矫正,兼顾位姿的准确性与平滑性;并可通过多种数据预测位姿,从而降低延迟。
2.研究背景
在位置、姿态追踪领域,单说姿态解算或者光学定位,分别有一些成熟的实现方式;但是,对于数据融合算法,特别是针对VR这一特定应用的实现方式,相关的研究却较少。
人眼对于VR场景的变化相当敏感,通常情况,如果VR场景有1mm以上的抖动,或者20ms以上的延迟,或者姿态有0.1度的抖动,人就会明显感觉到眩晕;所以,位姿追踪的精度需达到一定的程度,才能满足VR应用。本课题的研究重点,正是针对VR这一特定应用,尽可能的充分利用多种数据,提高位姿追踪精度、降低延迟,以实现更佳的VR体验效果。位置与姿态(位姿)的实时追踪,是虚拟现实(VR)的关键技术。
本课题就“基于数据融合的VR位姿追踪算法”进行系统地研究,不同于通常的位置、姿态分别解算,而是针对VR这一特定应用,通过多种数据相互补偿,提高位姿追踪精度。因此,在VR追踪方面,具有一定的科学意义和学术价值。通过VR追踪融合算法的研究,将整理出从传感器校准、到姿态解算、再到数据融合、最后预测输出的整套算法,可直接应用于VR头戴或者VR配件的位姿追踪,具有实际意义与应用价值。
3.系统设计流程图
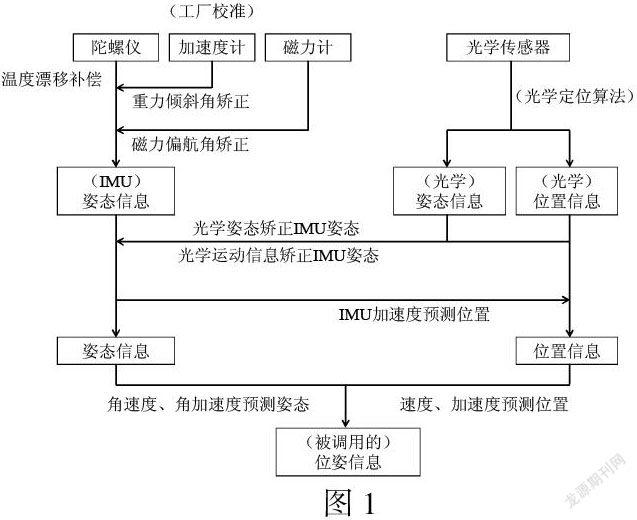
“位姿追踪融合算法”的流程,如下图所示:
磁力偏航角矫正是可根据磁力计数据矫正姿态偏航角。温度漂移补偿是配有温度传感器可针对陀螺仪作温漂补偿。姿态计算主要依靠陀螺仪积分,在一定条件下,可根据加速度计数据与重力的关系矫正姿态,这里指矫正倾斜角的偏差。工厂校准主要是陀螺仪、加速度计需要针对零偏和敏感度分别进行校准;磁力计需要连同头戴或手柄、控制器作整体校准。光学定位算法,此处可有多种不同算法,对应于不同的追踪形式。常用到的有双目视觉算法、PNP算法。
角速度、角加速度预测姿态是利用历史信息预测姿态,或者进一步,利用历史信息计算出角加速度用于预测姿态。光学运动信息矫正IMU姿态是利用光学运动信息,按照一定权重矫正IMU姿态,可防止姿态偏移。光学姿态矫正IMU姿态是利用光学姿态,按照一定权重矫正IMU姿态,可防止姿态偏移。IMU加速度预测位置是利用加速计及姿态信息,预测位置。说明:IMU更新速率通常快于光学,因此,用IMU数据补偿光学数据、预测位置。速度、加速度预测位置是针对图像方面的延迟而作的预测,或者说是为软件应用的调用而即时作的预测。
4.系统设计
位置与姿态(位姿)的实时追踪,是虚拟现实(VR)的关键技术。不同样式的追踪技术与设备竞相亮相。其中,光学追踪与IMU追踪是两种最常见的追踪方式。一般来说,位置追踪以光学方法为主,姿态跟踪以IMU方法为主。
通过光学、IMU以及其它相关器件,可获得多种数据(包括:位置、运动、姿态、角速度、加速度、地磁等数据),根据各种数据的特点,在算法上可取长补短,从而实现更佳的VR体验。例如,从IMU中提取加速度数据,可用于光学位置预测;再例如,从光学数据中得到运动信息,可用于IMU的姿态矫正。本课题,即是研究这种基于数据融合的虚拟现实位姿追踪算法,不同于位置、姿态分别解算,而是通过相互补偿或矫正,兼顾位姿的准确性与平滑性;并可通过多种数据预测位姿,从而降低延迟。
5.系统测试
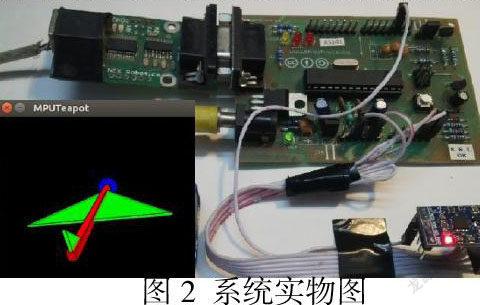
我们将实现一个由传感器主板,以及相关代码实现的一个3D模型,在此实验中,我们主要用到的硬件仪器有主板,传感器。在传感器当中我们置有陀螺仪,以及加速度计。在主板与传感器之间用线来连接主板的二引脚,它的主要作用是当数据准备就绪用于中断。再分别把A4,A5引脚与传感器相接,以及接地的引脚和vcc引脚接好,有一个引脚需要接电源来提供电压。用usb光缆把数据输回电脑。用arduino和processing软件来进行测试,先把代码上传成功之后打开串口监视器输入任意字符,可以看到来自传感器的xyz轴的位置在随传感器位置的变化而变化。下面是具体的测试图。
综上,本课题针对虚拟现实应用的特点,将光学数据与IMU数据相结合,研究基于数据融合的位姿追踪算法,通过位置信息与姿态信息的相互補偿或矫正,实现更准确的姿态追踪、更平滑的位置输出以及更少的图像延迟,提升VR体验效果。
参考文献
[1]黄鹏程,杨波,万新军等.基于双目视觉的多点三维振动测量系统[J].光学技术,2018,44(4):448-452.
[2]邱志成, 肖骏, 刘金国.柔性臂振动的双目三维检测和主动控制[J].电机与控制学报,2019,23(10):129-138.
[3]曹姝清,卢山,刘宗明等.基于目标特征的单目视觉快速相对位姿测量系统及方法:中国,CN201711242992.9[P].2017-11-30.
基金项目:本文系贵州师范学院课题“基于数据融合的虚拟现实位姿追踪系统”
