基于气压高度的机载RDSS系统定位精度提升
2021-09-10张延涛韩旭程佳靖王颖李晓锋
张延涛 韩旭 程佳靖 王颖 李晓锋


摘要:随着北斗RDSS在航空领域的应用越来越多,其导航定位精度提升问题也备受关注。本文针对机载北斗RDSS系统高空定位精度差的问题,提出基于气压高度数据进行定位精度提升的方案,在一定程度上提高了机载北斗RDSS用户导航可靠性,有助于RDSS系统在航空领域的推广应用。
关键词:北斗RDSS系统;双星定位;气压高度
中图法分类号: TN967 文献标识码: A
引言:
北斗最大的特色就是北斗RDSS系统,有与生俱来的通信与导航融合特性, 集定位与信息传输为一体,具备对目标进行管理和 监视的双重能力,可以作为通航空管的一个重要技 术手段。在空管雷达不能覆盖的地区,提供位置报 告和简单 双 向 报 文 通 信,解 决 空 管 雷 达“盲 区”问 题;在空管雷达能够覆盖的地区,以较低的代价作 为一种备份和增强[1]。地面中心能够直接知道导航用户的位置信息,便于位置信息的获取、汇集和统筹利用。而GPS用户只能通过单向接受GPS卫星信号来解算自己的位置,但用户只有自己知道自己的位置,除非用户借助另外的通信系统才能把自己的位置发送出来,所以北斗RDSS比较适合需要集中指挥调度行业的应用。
随着航空工业的快速发展,远海航行、非本土作战的需求,北斗RDSS系统已经开始应用于机载航空领域,但是在机载用户定位应用过程中定位精度差的问题制约其在该领域的发展[2]。本文基于地面北斗RDSS终端的定位原理,对其在机载高空定位解算策略进行完善,提高载机在高空的定位精度,提升其应用的可靠性和安全性。
1北斗RDSS系统定位原理
北斗RDSS系统定位是基于北斗一代双星定位系统,双星定位系统由两颗地球静止轨道卫星 、地面控制中心站和用户终端 3 部分构成[3]。
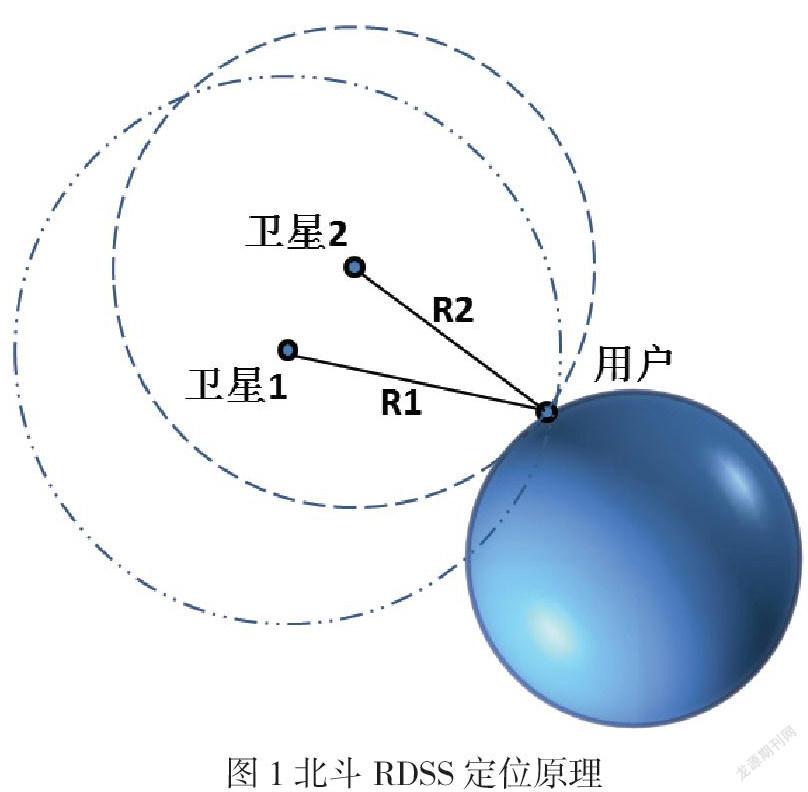
首先用户终端向两颗卫星发送定位申请,卫星带有信号转发装置向地面控制中心站转发定位信号,地面控制中心站根据收到定位信号的时间延迟,计算出中心站——卫星——用户机的距离,由于中心站——卫星的距离已知,由此可得用户终端与卫星的距离。然后地面中心站进行用户终端位置解算,以2颗在轨卫星的已知坐标为圆心,各以测定的卫星与用户终端的距离为半径,形成2个球面,用户终端将位于这2个球面交线的圆弧上;同时地面中心站配有数字高程地图,提供一个以地心为球心、以球心至地球表面高度为半径的非均匀球面[4];该球面与圆弧相交出两个焦点,分别位于数字高程地图的南、北半球表面,位于北半球的交点即用户终端的位置,如圖1。最后地面控制中心站将解算的定位结果通过卫星发送给用户,定位完成。
2机载北斗RDSS系统定位精度增强方案
从上述北斗RDSS系统定位原理分析可知,其定位是基于3球交汇测量原理完成位置坐标的解算,对于航空应用中,用户位置处于万米高空,用户进行有源定位时,地面中心站根据收到的数据解算时,以卫两颗星和用户的距离形成的两个球面与数字地球交汇的点作为用户的定位点,可以发现该位置点是处于地球表面,而不是处于高空用户的实际位置,所以定位的结果与实际位置存在偏差。根据北斗RDSS系统的定位原理分析,卫星处于赤道上方,当用户处于地球北半球的高空时,以卫星和用户的距离为半径形成的两个球面相交形成的圆面,与地球球面交汇的得到定位点,该点的纬度值低于用户实际纬度值,导致定位精度比较差,且用户距离地面越高,纬度偏差越大。这不仅严重威胁机载航空用户的安全 ,也制约着该系统在航空、远海领域的使用效果,因此提升RDSS系统高空用户定位精度对于机载航空领域的安全性十分必要。
本文基于机载设备应用的现状,采用气压高度数据对RDSS系统的定位解算方法进行修正,提出了一种机载RDSS系统定位精度提升的有效方案,便于机上实施改进,具有非常广阔的应用前景。
2.1基于气压高度RDSS定位系统架构
飞机都配有气压高度数据测量设备,北斗RDSS系统与其交联,采集载机用户实时压高度,定位流程如图1所示。当用户利用北斗RDSS系统发出定位申请时,同时将定位时刻的载机气压高度数据通过卫星发送给地面中心站,地面中心站结合用户的气压高度数据,利用三球交汇进行位置解算。
2.2定位精度的优化方法
地面中心站收到卫星转发的载机用户定位申请数据进行位置解算,并根据载机用户的气压高度H对原数字地球进行修正[5],得到一个加大的数字地球,再利用三球交汇的原理解算出用户的位置坐标。利用气压高度数据对三球交汇定位过程进行修正的原理如图3所示。
2.3定位解算过程
以地球中心为坐标原点建立坐标系,假设载机用户所在位置坐标,载机用户的气压高度为,数字地球的半径,两颗卫星的坐标分别为,则载机用户距离两颗卫星的距离分别为和。
由于两颗导航卫星的坐标、地球半径、气压高度已知,则可求得载机用户的坐标,从而得到用户的位置信息[6]。
2.4仿真结果分析
依据上述分析,假定地球为标准的圆球,半径6371393m,北斗双星分别位于赤道、东经80°和140°上方36000km高空,用户所在位置处于东经120°,北纬N°。通过分析用户在所处经纬度不变的情况下高程差H从0m~10000m连续变化时,地面解算时若不进行高程修正定位申请后获得的纬度N1结果与原实际纬度N的差别对比如下。
建立宇宙直角坐标系,北斗卫星1的坐标如下:
北斗卫星2的坐标如下:
用户所处高程差为m的实际位置坐标如下:
若不进行高程修正解算得到的用户位置如下:
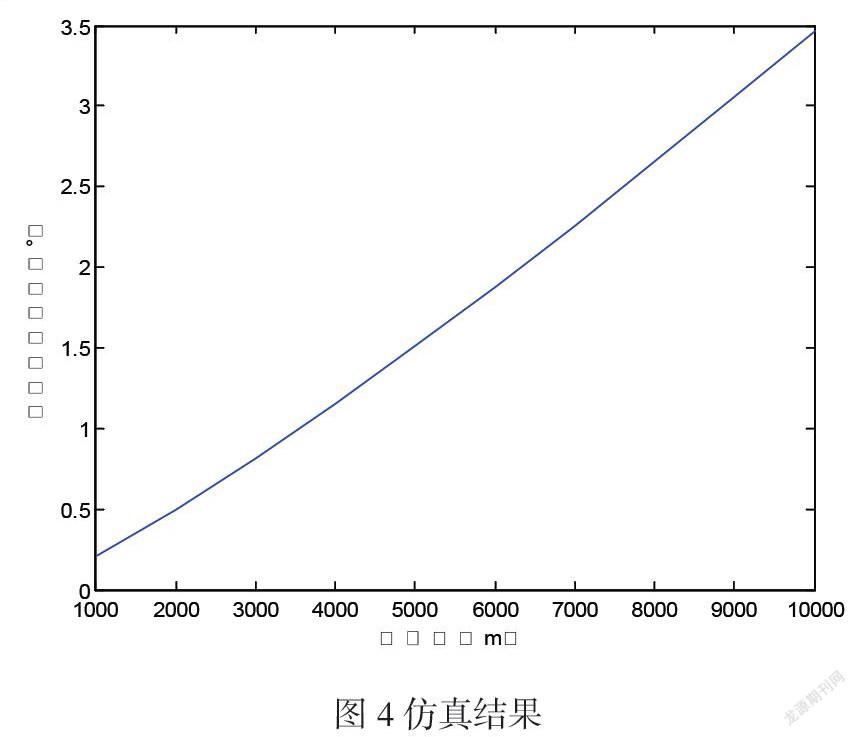
根据北斗RDSS系统“三球交汇”定位原理,可以得到用户定位的纬度差与用户的高程的关系曲线,详见图4。随着用户所处位置的气压高度数据越大,定位得到的纬度值与实际用户实际所处的纬度值偏差越大,所以对于飞行和机载用户,在进行北斗RDSS系统定位时,采用气压高度数据对定位解算过程进行修正尤为必要,从未保证用户定位结果的置信度和可靠性。
3结束语
本文针对机载北斗RDSS系统高空定位精度差的问题,提出了基于载机气压高度数据进行定位精度提升的方案,通过仿真对比分析,该方案解决了高空用户利用北斗RDSS系统定位时精度较差的问题,提升了其在机载应用领域的可靠性和安全性,有助于其进一步推广和应用。
参考文献:
【1】赵陆文,李广侠,戴卫恒,等,北斗 RDSS应用于通航空管的机遇与挑战[J].全球定位系统,2015,40(2):26-40.
【2】马卫华,袁建平,罗建军.北斗系统低纬度区域定位精度增强方案探讨[J].全球定位系统,2005,46(3):46-51.
【3】张怡,赵少松,王永生.基于双星定位系统的无源定位方案的研究[J].电子测量技术, 2007,30(9):153-156.
【4】刘肤体.一种北斗双星定位新算法[J].全球定位系统,2007,25(2):25-27.
【5】双星系统工作方式改进的探讨[J].电子学报,2001(09):1217-1219.
【6】吉春生,杨小小.一种基于双星导航系统的无源定位方法研究及其实现方案[J].海军工程大学学报, 2005,17(3):33-37.
作者简介:张延涛,1991.09.05,汉族,陕西西安,硕士,初级,研究方向,机载设备通信,信号处理
中航西安飞机工业集团股份有限公司 710089
