数控车床自动上下料机械手结构设计
2021-09-10管树龙
管树龙






摘要:针对于数控车床而设计了结构圆柱坐标型的自动上下料机械手。主要通过应用CAD对数控车床自动上下料机械手液压传动原理、机械手整体以及部分零件的二维图绘制,同时运用Solidworks对数控车床自动上下料机械手进行三维模型的绘制以及机械手运动仿真的制作。并分析了数控车床自动上下料机械手的操作流程,主要采用液压缸、步进电机等元件实现机械手的运动部分。
关键词:数控车床;机械手;传动机构;液压系统;驱动系统
中图分类号:TH122;TG65 文献标识码:A 文章编号:1674-957X(2021)07-0075-03
0 引言
机械手是在机械自动化生产过程中,通常用来夹持与运输工件的一种装置,属于工业机器人的一种。机械手可以向人类手臂一样工作,模仿并代替人类按照预定要求完成运输工件以及夹持工件等作业。例如在一些危险环境下的工作以及周期性重复无聊的工作,机械手都可以很好地代替人类将其完成,并且机械手在减轻工人劳动强度及危险的同时也可以提高劳动生产力。随着我国机械制造业,自动化的发展,工业机械手的研发也越来越引起大家的关注。正是由于机械手的应用十分广泛,所以机械手的研发十分重要。
1 数控车床自动上下料机械手的设计方案
1.1 机械手结构的设计
因所研究机械手自由度为3,包括两个直线运动及一个回转运动,共计三种运动方式。其中直线运动为手臂的升降及伸缩。回转运动为机械手机座的旋转。选择此结构类型的好处是机械手手臂活动范围较大且精度较高。并且其构造简单,易装卸。机械手工作布局如图1,整体结构造型如图2。
1.2 数控车床自动上下料机械手手部设计
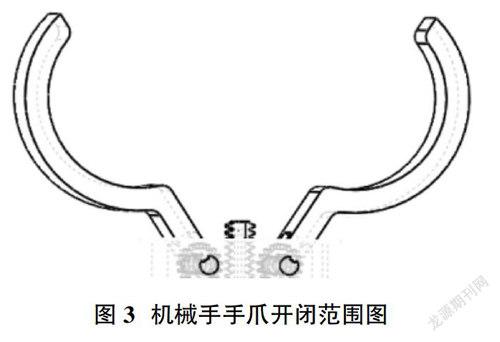
机械手手爪与手腕相连接,属于末端执行器的一种,安装在手腕末端。机械手手爪部位结构应有一定的夹紧力,保证可以夹紧工件,使工件牢固稳定。通常情况下,机械手手爪的开闭范围越大越好,本设计中机械手手爪开闭范围如图3。
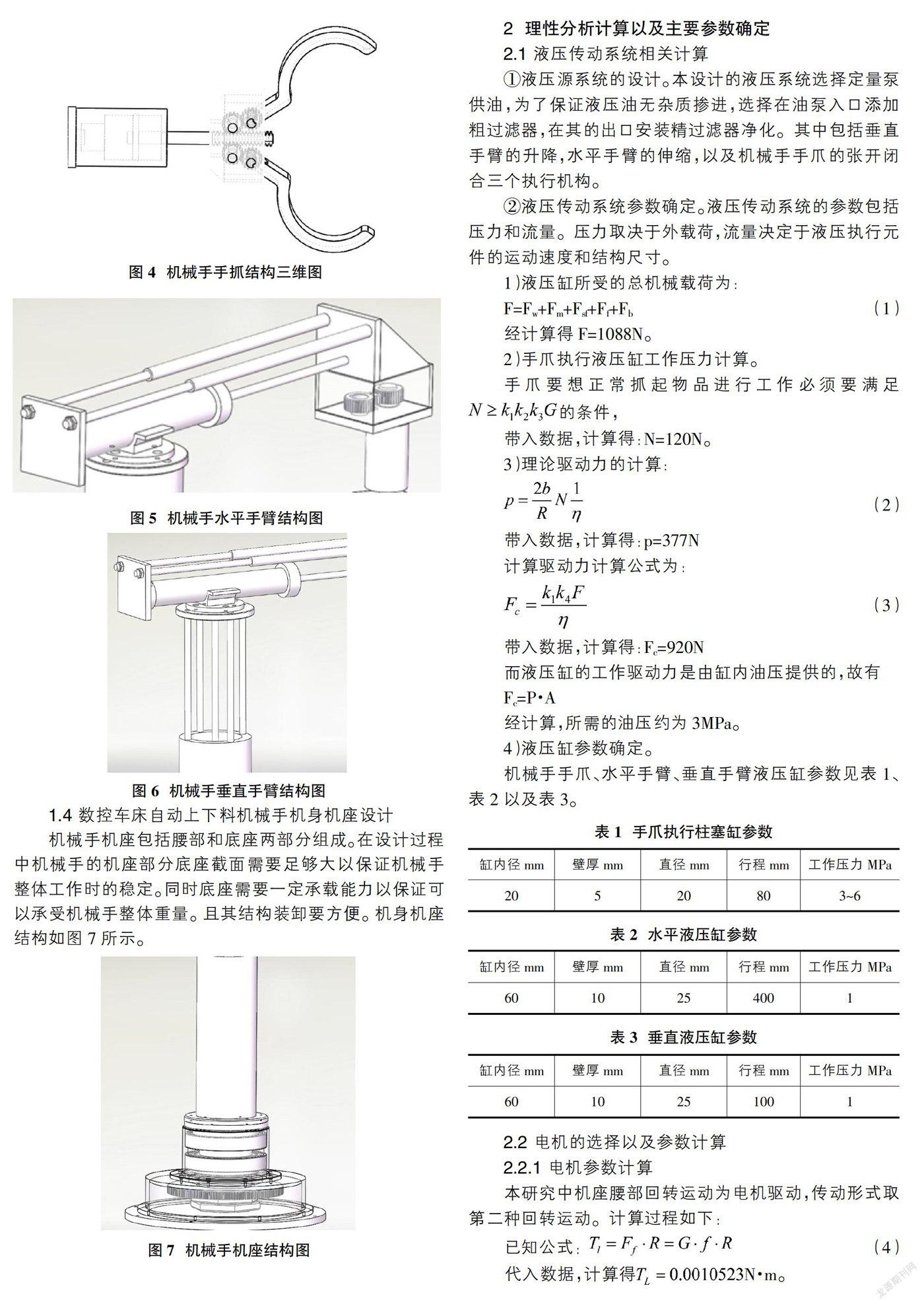
手爪结构采用的是齿轮齿条式。通过活塞往返带动齿条完成手爪张开或夹紧的动作。手爪的结构设计具体如图4。
1.3 数控车床自动上下料机械手手臂设计
机械手的手臂是机械手的主要执行部位。考虑到操纵器在工作中的稳定性和安全性,将两个平行的导向杆添加到该对象的水平框架中,使其与运动活塞杆截面形成等腰三角形结构如图5,以保证其结构更加稳定牢靠。垂直手臂添加四个导杆其截面为正四边形如图6,每个导杆都选用空心结构以保证机械手整体重量。添加此导杆结构主要原因是可以保证机械手整体稳定。
1.4 数控车床自动上下料机械手机身机座设计
机械手机座包括腰部和底座两部分组成。在设计过程中机械手的机座部分底座截面需要足够大以保证机械手整体工作时的稳定。同时底座需要一定承载能力以保证可以承受机械手整体重量。且其结构装卸要方便。机身机座结构如图7所示。
2 理性分析计算以及主要参数确定
2.1 液压传动系统相关计算
①液压源系统的设计。本设计的液压系统选择定量泵供油,为了保证液压油无杂质掺进,选择在油泵入口添加粗过滤器,在其的出口安装精过滤器净化。其中包括垂直手臂的升降,水平手臂的伸缩,以及机械手手爪的张开闭合三个执行机构。
②液压传动系统参数确定。液压传动系统的参数包括压力和流量。压力取决于外载荷,流量决定于液压执行元件的运动速度和结构尺寸。
1)液压缸所受的总机械载荷为:
F=Fw+Fm+Fsf+Ff+Fb (1)
經计算得F=1088N。
2)手爪执行液压缸工作压力计算。
手爪要想正常抓起物品进行工作必须要满足的条件,
带入数据,计算得:N=120N。
3)理论驱动力的计算:
(2)
带入数据,计算得:p=377N
计算驱动力计算公式为:
(3)
带入数据,计算得:Fc=920N
而液压缸的工作驱动力是由缸内油压提供的,故有
Fc=P·A
经计算,所需的油压约为3MPa。
4)液压缸参数确定。
机械手手爪、水平手臂、垂直手臂液压缸参数见表1、表2以及表3。
2.2 电机的选择以及参数计算
2.2.1 电机参数计算
本研究中机座腰部回转运动为电机驱动,传动形式取第二种回转运动。计算过程如下:
已知公式: (4)
代入数据,计算得N·m。
2.2.2 电机选型
根据计算结果,综合考虑各种因素,通过查阅《机械手册》,最终本设计选用型号为110BYG550B-SAKRMA-0301的步进电机,此电机转矩较高,振动较低,综合性能较好。该电机技术参数以及参数曲线见表4及图8。
3 数控车床自动上下料机械手控制系统设计
3.1 机械手的工作流程
如图9所示为机械手的工作流程图。
机械手从原点开始,水平手臂前伸到达指定位置后,水平手臂前伸停止,垂直手臂下降,下降同时张开机械手手爪,下降到达指定位置后,下降停止,同时手爪闭合夹持工件,接着垂直手臂向上运动,到达指定位置后,运动停止;机械手机座逆时针转动,转过90度到达位置后,停止转动;然后垂直手臂需下降到卡盘中心位置停止,机械手完成定位,水平手臂收回,将工件装入卡盘;完成装件后,卡盘收紧,机械手手爪张开,然后垂直手臂向上运动到达位置后上升停止;机械手机座顺时针转动,转过90度到达位置后转动停止,此时机械手回到原点待命,车床进行加工。
数控车床完成工件加工,机械手接到下料命令后,机械手机座逆时针旋转90度后停止,垂直手臂向下运动到指定位置后停止,手爪闭合夹持住已加工工件,车床卡盘打开,水平手臂前伸取出工件,垂直手臂向上运动到达位置后停止,机座顺时针旋转90度到达位置后停止;垂直手臂向下运动到达位置后停止,手爪张开,将工件放入指定位置后,垂直手臂继续向上运动,到达位置后停止,手爪闭合,最后机械手水平手臂向后伸缩,到达位置后缩停止,机械手回到原点,上下料过程结束。
3.2 数控车床自动上下料机械手操作面板
本设计理想操作面板如图10所示。工作方式分为手动与自动。
手动:通过按钮控制。如工作方式选为手动,运动方式选为升降,此时按下启动,垂直手臂上升;按下停止,垂直手臂下降。或运动方式选为伸缩,按下启动,水平手臂向前伸缩,按下停止,水平手臂向后伸缩。同理,运动方式选为正逆旋转,按下启动,机座顺时针转动,按下停止,机械手逆时针转动。
自动:按下启动键,机械手将从原点开始自动完成循环动作。按下停止键,机械手将继续完成一次循环动作后停止,最后再次回到原点位置。
參考文献:
[1]李海雁.气动在机械手中的应用[J].中国高新技术企业, 2014(19):39-40.
[2]王军义.浅谈利用PLC控制自动机械装[J].卷宗,2014(6):302.
[3]武帅.数控机床上下料机械手设计的目的和发现趋势[J].环球市场,2018(002):379.
[4]袁川来,胡灿,杨剑波.基于液压驱动的数控机床上下料机械手的设计与研究[J].湖南工业大学学报,2014,028(003):20-23.
[5]王相如.浅析工业机械手的定位平稳性与运动缓冲[J].科技致富向导,2011(11):416,384.
