兼容机器视觉的卫星定位高精度农机自动驾驶导航系统
2021-09-10张家同
摘要:本论文论述了兼容机器视觉的高精度卫星定位智慧农机自动导航系统在农田作业无人控制机中的应用范例。基于全球卫星导航定位系统(GNSS)、地理信息系统(GIS)、图像识别技术和计算机自动控制系统等先进技术,对农业资源、农业作业实施精确定时、定位、定量控制,实现优质、高产、低耗、环保的可持续发展农业的有效途径。
关键词:机器视觉 高精度卫星定位 农机自动驾驶
引言
智慧农业是基于信息和知识管理的现代农业生产系统。应用全球卫星导航定位系统(GNSS)、地理信息系统(GIS)、图像识别技术和计算机自动控制系统等先进技术,对农业资源、农业作业实施精确定时、定位、定量控制,实现优质、高产、低耗、环保的可持续发展农业的有效途径。农机自动驾驶系统是智慧精准农业技术体系的重要组成部分,能够实现在大面积耕地上的快速、高效、高精度、自动化作业,可用于播种、收割等多个生产环节,极大精准定位技术及应用是智慧农业的关键技术。
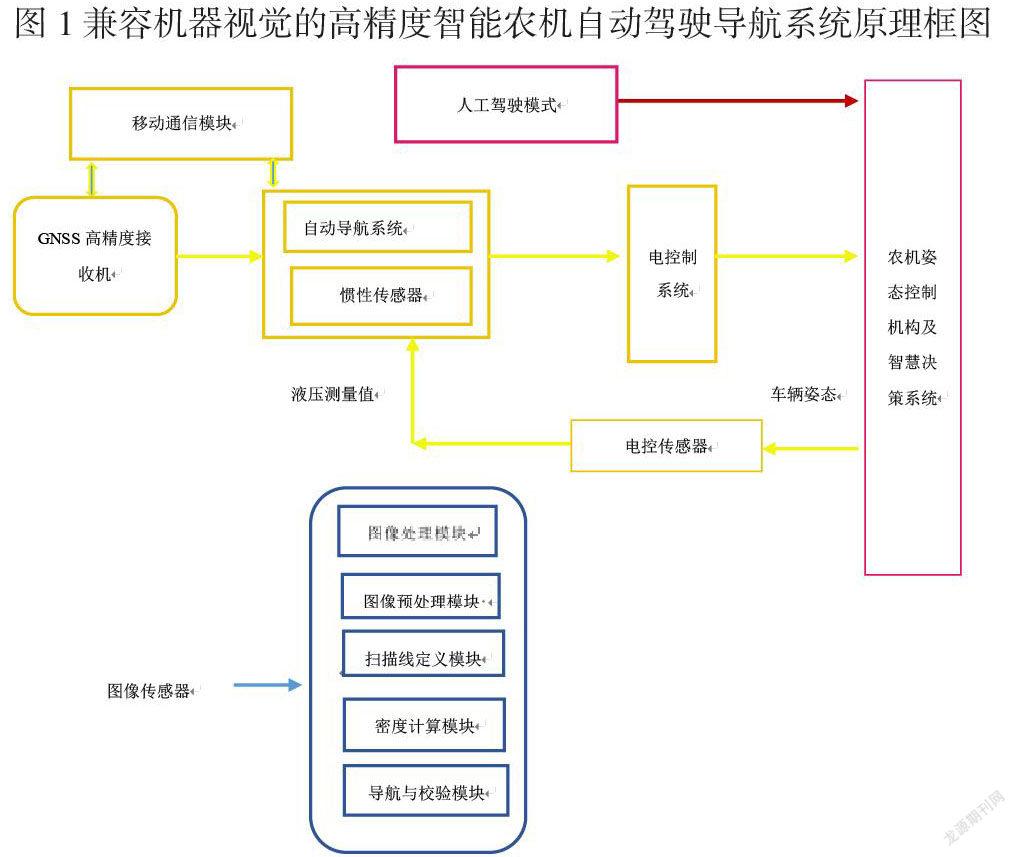
1.基于兼容机器视觉的卫星定位高精度智慧农机自动驾驶导航系统(以下简称自动导航系统)可以解决单纯依靠卫星定位导航存在难以获取农田场景下农作物垄相对位置导致农机辗轧、作物破坏等问题发生,此技术在精准农业生产中推广应用意义重大。自动导航系统由人工控制、基于高精度北斗定位技术的农机自动导航系统、机器视觉的智能农机自动导航系统等三部分组成。原理框图见图1.。
在图中,其中红线部分标志人工导航系统、黄线部分标识是高精度北斗卫星自动导航系统、蓝线部分是机器视觉自动导航系统。
在实际田间作业时,大片整齐农田优先采用高精度北斗卫星自动导航系统,位置准确度可达到厘米级。小片不规整农田可采用机器视觉自动导航模式,位置精度也可达厘米级。同时保护农田作物免受毁坏。
随着电子控制技术的进步和农业作业质量要求的提高,农林拖拉机及机械机具的电控单元(ECU)越来越多,传统点对点的布线方式已不可能满足需求,应用串行总线成为农业车辆电控技术发展的必然趋势。ISO 11783标准是“拖拉机和农林业车辆---系列控制和通讯数据网”的标准,其从总体上规定了农林拖拉机及其安装、半安装、牵引或者自行式器具的串行控制和通讯数据网络,旨在标准化传感器、执行器、控制单元件、信息存储和显示单元数据传输的方法和格式,无论是装载拖拉机或者器具上还是作为其部件,其是应用于农业森林机械的串行网络通信协议,采用CAN2.0B为基础,支持实时数据通信、操作员与ECU在线交互功能等,并且兼容J1939协议,常常被称为ISO Bus或者ISOBUS。
1.1.基于高精度北斗定位技术的农机自动导航系统
高精度北斗定位技术的农机自动导航系统由高精度卫星定位接收机和农机控制系统组成,负责具体操作农机完成自动化精细作业。接收机接收卫星发送的定位信息,进行厘米级精度的定位解算,并将解算结果反馈给农机控制系统。农机控制系统根据流动站接收机提供的高精度定位解算结果,按照预先设定的轨迹线行驶,完成精细作业,控制流程见图1黄线所示
无线通信模块接收云端后台发送的RTK差分报文给计算单元,计算单元将报文转发给高精度定位模块,高精度定位模块通过解算获得高精度的定位信息。
高精度定位模块需要配合高精度定位天线才能正常工作,高精度定位天线采用可同时支持BDS B1/B2、GPSL1/L2、GLONASS G1/G2三系统六个频点。无线通信模块主要作用是将设备的位置信息和其他信息发送给云端后台,同时接收云端后台的控制信息。无线通信模块采用支持四频点GSM/GPRS,内置TCP/IP协议栈,支持串口消息指令,上下行速率可达85.6kbps。无线通信模块的通信天线可采用柔性天线,支持四频点,可固定在外壳3上。
为了实现农用机械作业的自动路径规划和农机的自动驾驶,根据实际采集农田边界数据(或者预先输入边界数据),实现直线路径端点计算和边距计算,给出最优作业方向和最佳作业路径方案。传统的GPS面积计算,一般采用投影的方式,将经纬度信息利用高斯-克吕格投影转换为平面坐标后,再通过数学运算得出田地面积。由于投影法计算公式过于复杂,再加上地球是非规则椭圆,计算出的数据存在很大误差,并且传统的测量方法仅仅适用于静态测量,难以满足动态测量。研究过程中发现在同经度或同纬度情况下,任意两点的实际单位距离近似相等。在经度和纬度与实际距离的换算中,可采用经纬度单位距离与两点间的经纬度实际距离来计算任意两点间的距离。从而可以将传统的投影转换面积测量方法简单化,仅仅依靠两点间的距离与农业机械作业宽度就可近似测量作业面积。
1.2. 机器视觉的智能农机自动导航系统
基于机器视觉的智能农机自动导航系统,包括:图像传感模块,获取导航路径上的农田图像;图像处理模块,对农田图像进行预处理,从农田图像中提取农作物线和导航线,并计算农机与导航线的横向偏差值和航向角偏差值,并对计算结果进行可靠性判断;农机路径规划模块,根据导航线进行田间作业路径规划.
通过扫描线对农田场景进行绿植或作物密度统计,进而确定农作物线及智能农机的导航线,然后通过农作物线上的密度及由导航线计算出的横向偏差值和航向角偏差值来判断当前视觉导航结果的有效性;通过设置扫描线密集程度的方式控制农作物线的识别速度,使其满足农机导航实时性要求,同时,通过后续的校验机制保障了农作物线和导航线识别结果有效性,可有效提高智能农机导航精度及稳定性,为其他精准农业作业如施肥、除草等提供有力支撑。
雙目相机由于安装处理灵活、价格便宜,即可处理图片又能获取深度信息。可以conformal lattice规划方法对农机行进轨迹进行规划。
假定农机以较小的速度匀速前进,若要求农机以变化速度行驶,则在规划时需要同时考虑规划出合理的速度变化曲线,农机转向系统通过农机的位置与路径点的偏差输出正确的方向盘转角,并控制转向执行机构完成转向,使横向偏差值和航向角偏差值减少,从而使得农机不断跟随导航线行进。转向执行机构包括电控液压转向系统、电驱齿轮齿条传动机构、阿克曼转向系统或其他转向系统等。根据对农机改造的不同,也可包括电控四轮独立转向系统。消除图像噪声包括因农机颠簸、光照变化以及物体阴影造成的图像干扰是必须的。作物特征增强的方法是作用于任何突出的农作物带,提高农作物带识别速度和准确度的方法,主要包括图像的绿化处理、超绿指数及其变体指标表征、形态学处理,根据选取的处理流程不同,也包括基于深度卷积神经网络输出便于聚类的嵌入向量等操作。
背景可包含地面、泥土、非农作物带的其他绿色植被、天空、建筑、车辆及其他可能目标。农田作物与背景二值化分割是指将农田作物与背景编码为不同数值从而在同一图像坐标系中进行区分,通常将农田作物编码为1,背景编码为0。分割方法包含传统图像超绿指数的阈值分割方法、将遗传算法和粒子群算法等加入进行辅助分割方法和基于深度卷积神经网络的图像语义分割方法等。
1)扫描线定义模块:定义出农田图像中感兴趣区域内一组与图像传感模块的镜面垂直且相互平行的扫描线。
2)密度计算模块:设置扫描线的宽度,形成以扫描线为中心线的扫描区域,对每一扫描区域内的特征点密度进行快速计算;根据每一扫描区域的特征点密度,形成特征点密度曲线,计算出距离特征点密度曲线每一个上升沿和下降沿中点最近的扫描线,并选取特征点密度最高的一条或一条以上作为农作物线;
3)导航与校验模块:将农作物线作为农机的导航线,并根据导航线对应的特征点密度、横向偏差值以及航向角偏差值判断导航结果的可靠性。
田间作业路径规划是根据农机与导航线的相对位置,通过规划算法确定时序的、包含多個路径点的车辆运动轨迹。
导航与校验模块判断横向偏差值是否大于预设的门限,如大于了预设的门限,则说明检测出的导航线不是最优选择,判断识别结果无效;以及导航与校验模块判断航向角偏差值是否大于预设的门限,如大于了预设的门限,则说明检测出的导航线不是最优选择,判断识别结果无效。
结论:
1.兼容视觉识别的卫星定位高精度农机自动驾驶导航系统很好地解决了大片农田作业与小片不规整间植多作物农田作业的矛盾,对农田作物保护、提升作业效率具有强大的技术支撑。
2.设备操作简便。只需要开机并输入所耕作地块的地理位置编号,安装在农机上的导航终端设备就能够自动登录系统,完成高精度自动导航作业。
3.采用ISO 11783接口标准,提升了控制端与不同农机的适配能力。
参考文献:
[1]北斗地基增强系统在黑龙江精准农业中的应用卫星应用 2015 年第 12 期
[2]CN201910526234.2 基于机器视觉的智能农机导航系统及方法
[3]https://blog.csdn.net/weixin_46723764/article/details/109270812
[4]《MXT906B技术手册》 梦芯公司
作者简介:张家同(1963.07-),民族:汉,性别:男,籍贯:江苏东海,硕士研究生,毕业于成都电讯工程学院(现电子科技大学)无线电专业,高级工程师,研究方向:微波、电子对抗、汽车智能互联、农机无人驾驶技术等。
深圳市赛格导航科技股份有限公司 广东 深圳 518000
