超声波清洗机的设计
2021-09-10刘元昊王茜韩昱竹段世杰刘懿磊
刘元昊 王茜 韩昱竹 段世杰 刘懿磊

摘 要:超声波清洗机的设计主要包括结构设计和控制系统设计,鉴于此,首先阐明了超声波清洗的原理,其次介绍了清洗机结构模块的设计,最后说明了控制系统的构成,详细分析了如何利用单片机对超声波清洗机的电机进行正反转及调速控制,从而达到更好的清洗效果。
关键词:超声波;清洗机;电机调速
0 引言
目前,在人们的生活中,超声波清洗技术应用广泛,随着对超声波清洗技术研究的不断深入,超声波清洗的成本越来越低,而其带来的经济效益越来越高,因此超声波清洗深受大众喜爱。“空化作用”和“直进流作用”是超声波清洗的两个重要作用,超声波清洗主要就是利用超声波在液体中的“空化作用”和“直进流作用”对清洗液和被清洗物上污渍直接和间接两方面的综合作用,使得污渍被剥离清洗物件的表面,达到快速清洗干净的目的[1]。
1 超声波清洗原理
超声波是一种频率高于20 kHz的声波,其每秒震动次数极多。超声波在介质中传播时会导致附近质点的剧烈运动,从而使附近质点获得能量。超声波清洗技术就是依靠超声波在介质质点处震动能力足够高引发“超声波空化现象”。被清洗物件表面的污渍可以被冲击力剥离或者出现裂缝,持续不断地冲击,最终可以使污垢迅速剥落于被清洗物的表面[2]。
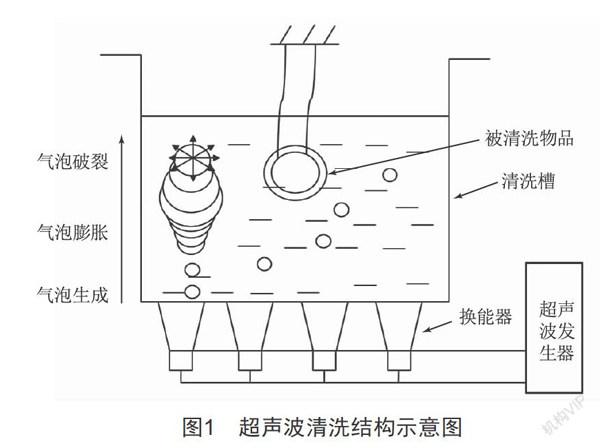
最简单的超声波清洗设备由超声波发生器、换能器和清洗槽3个模块构成,3个模块相互结合、共同构成超声波清洗机。超声波发生器在超声波清洗设备中起到产生并向换能器提供超声能量和将电能转换成高频交流电信号的作用,是整个清洗装置中必不可少的一部分。换能器主要将超声波发生器输入的电功率转化成高强度的机械震动功率传递到清洗槽。超声波清洗结构示意图如图1所示。
2 清洗机的结构设计
清洗机的结构设计主要包括清洗机外壳、进水口、排水口、支撑脚、清洗槽内部的洗涮辊以及控制电机正反转的按钮,如图2所示。
清洗機的外壳由内外两层构成,内层安装若干个超声波振子,外层起到与外界隔离和安全保护的作用,一是防止清洗过程中迸溅的水流接触到超声波振子,造成线路短路等问题;二是防止外界的灰尘粘连在超声波振子上影响清洗效果。
进水口是清洗槽和外界水流管道的连接枢纽,外界水流通过进水口流入到清洗槽的内部。凹形污物收集盒位于清洗槽内部的右侧,可以进行拆卸和安装。凹形污物收集盒上开有一定直径的圆形网格小孔,当污物外形过大时便可留在污物收集盒内部,污物在收集盒内积累到一定数量和质量时,可将整个污物收纳盒拆卸下来,将里面的污物倾泻到固定的位置。
根据预先设置的清洗目标,当清洗完成后打开排水口,污水会顺着网格小孔排放到外面。
圆形支撑脚主要起到对清洗机支撑的作用。
洗涮辊安装在清洗槽内部中央位置,方便更大程度地对清洗槽内部的水流起到搅拌的作用,从而缩短整个清洗过程的时间。通过驱动电机来使洗涮辊转动,通过控制电机的不同转速,经过传动装置可以给予洗涮辊不同的速度,洗涮辊不同的转动速度对清洗槽内部的水流起到不同的搅拌作用,可以更加有效地去除被清洗物件上的污渍。
3 清洗机控制系统设计
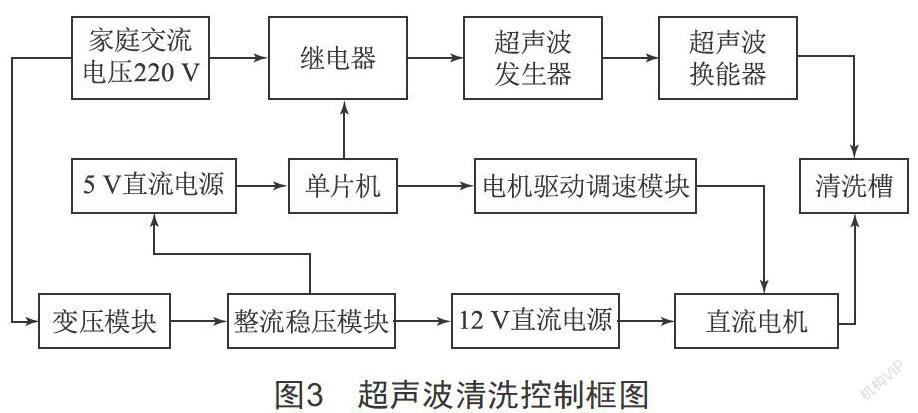
超声波清洗机的微处理器采用STC89C51单片机,对清洗机运行的整体清洗过程进行控制[3]。整个装置的主要电路有电机驱动调速电路和超声波发生器通断电路。通过接通与断开继电器来控制超声波发生器是否工作。供电电源主要采用220 V家庭交流电压,清洗机使用变压模块和稳压模块分别转化为单片机所需要的5 V直流电源和驱动直流电机所需的12 V直流电源[4]。构建的系统整体如图3所示。
3.1 直流电机调速
在清洗槽的底部放置一个直流电机,直流电机通过传动装置和位于清洗槽内部的洗涮辊进行连接,这样就可以通过直流电机来带动清洗槽内部的洗涮辊转动,从而带动清洗槽内部清洗液流动,起到良好的搅拌作用,进而大大缩短被清洗物件表面污渍被分离的时间。清洗槽内部水流动得越快,清洗效果越明显,因此通过调节电机的不同转速可以达到不同的清洗效果。
直流电机调速方法包括改变电枢电压大小、改变磁通量、改变电枢回路串接电阻大小。改变磁通量的方法虽然可以平滑无级调速,但调速范围不大,存在一定的局限性。改变串接电阻大小的方法在电机空载和轻载的情况下,电机的调速范围比较小,并且在调速电阻上有能量损耗,经济效益比较差。基于以上两种电机调速方法的特性,超声波清洗机的直流电机采用改变电枢电压的调速方法。
采用PWM调速方法改变电机两端电压的大小,输出的平均电压为U=U0t1/(t1+t2),其中t1为一个周期内高电平所持续的时间,t2为一个周期内低电平所持续的时间,U0为总电压,占空比α=t1/(t1+t2)。由上述公式可知,要想实现对直流电机的调速,可在电源总电压不变的情况下,改变占空比的大小。
3.2 系统硬件设计
超声波清洗机硬件系统主要包括12 V直流电机模块、键盘调速控制模块、示波器观察波形模块、STC89C51单片机模块、L298N电机驱动模块等。单片机正常工作有3个必要条件:电源、时钟电路、复位电路。L298N模块是一种双H桥电机驱动芯片模块,其拥有4个通道的逻辑电路。VS端被连接到电动机驱动电源,逻辑控制电源连接VSS。ENA、ENB引脚为控制使能端,电机正转时IN1引脚和IN2引脚分别输入PWM信号和低电平信号,当电机反转时再将IN1引脚和IN2引脚的信号互换,从而达到控制12 V直流电机正反转的目的,并且通过改变PWM信号的占空比可以实现电机的调速。示波器一端连接在IN1引脚端,另一端连接在IN2引脚端,示波器主要用来观察输出波形的占空比。键盘控制模块为独立按键模块,按下不同的按键,直流电机按不同的转向和速度运行[5]。系统的硬件设计如图4所示。
