基于滑模磁链观测器的异步电机转矩控制仿真
2021-09-10詹佩张明肖海峰
詹佩 张明 肖海峰

摘 要:针对传统异步电机磁链观测精度较差的问题,提出了一种新型滑模变结构定子磁链观测方法,该观测器在静止坐标系下通过滑模趋近律,使观测电流跟随实际电流变化,从而实现对定子磁链的观测。此外,與传统滑模磁链观测器不同,该方法可以实现对转子速度及磁链的估计,磁链观测过程独立于实际转子速度分量,具有较强的鲁棒性。理论分析和仿真结果表明,该方法能实现定子磁链的精确观测,具有精度高、鲁棒性强等特点。
关键词:异步电机;无位置传感器;滑模观测器;滑模趋近律
0 引言
交流感应电机无位置传感器控制技术是现代交流调速系统的研究和应用热点之一,众多国内外学者对此做了大量的研究工作,相继提出了基于矢量控制和直接转矩控制的无位置传感器控制系统,并取得了大量的成绩[1-6]。
传统的矢量控制是利用坐标变换将磁场重新定位以获得等效直流电机模型,但该控制方法需要进行复杂的坐标变换。直接转矩控制是分别对电机转矩和定子磁链实施开关控制,控制方法简单易实现。但这些控制策略是以准确观测转子磁链为前提的,通常基于电压模型和电流模型的磁链观测精度差,难以获得满意的控制性能。
在众多磁链估计方法的研究中,文献[7]提出的自适应滑模观测器对电机参数依赖小,具有良好的鲁棒性能,然而前提是需要准确获得转子位置,这就需要加装位置传感器,增加了系统成本。而全阶自适应磁链、定子电阻观测器[7]运算相对复杂,观测误差较大。
滑模变结构控制是一种针对非线性系统的高频、高效开关控制策略,其以控制过程不依赖于精确的系统参数的优点一直受到广泛关注[1-4]。
本文针对上述磁链观测过程中存在的问题,利用滑模变结构控制理论的优点,提出一种感应电机滑模变结构定子磁链观测方法,该观测器在静止坐标系中实现定子磁链观测,通过定、转子磁耦合的函数关系计算转子磁链,通过转子磁链所在的空间位置实时计算转子位置;该观测器不依赖转子速度变化。仿真结果表明,该方法鲁棒性和有效性良好。
1 异步电机数学模型
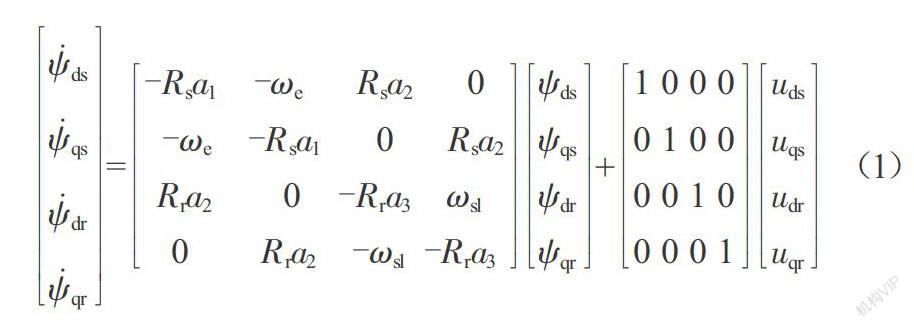
在dq坐标系下,令定子磁链、转子磁链分别为ψds、ψqs、ψdr、ψqr,定子电流为ids、iqs,转子电角速度为ωe,其电机电压模型状态方程如下:
ds
qs
dr
qr=-Rsa1 -ωe Rsa2 0
-ωe -Rsa1 0 Rsa2
Rra2 0 -Rra3 ωsl
0 Rra2 -ωsl -Rra3ψds
ψqs
ψdr
ψqr+1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1uds
uqs
udr
uqr (1)
式中:uds、uqs、udr、uqr分别为定、转子交直轴电压;Rs、Rr分别为定、转子电阻;ωsl=ωe-ωr为转差;a1=1/σLs、a2=Lm/σLsLr、a3=1/Lr-Lm2/σLsLr2、σ=1-Lm2/LsLr,其中Ls、Lr、Lm分别为定、转子电感及互感。
转矩方程为:
Te=
ψdsiqs (2)
式中:p为电机极对数。
2 滑模磁链观测器设计与稳定性分析
通常无位置传感器电机控制系统中多采用自适应或滑模全阶观测器[8-9],这些观测器存在一个或多个与电机转子速度相关的模型方程,容易受到参数失配的影响。此外,转子速度估计将会滞后于状态观测一个控制周期,同时转子速度估计易受到误差累积、噪声和延迟等因素的影响,并直接导致磁链观测值进一步恶化,系统性能变得更差。
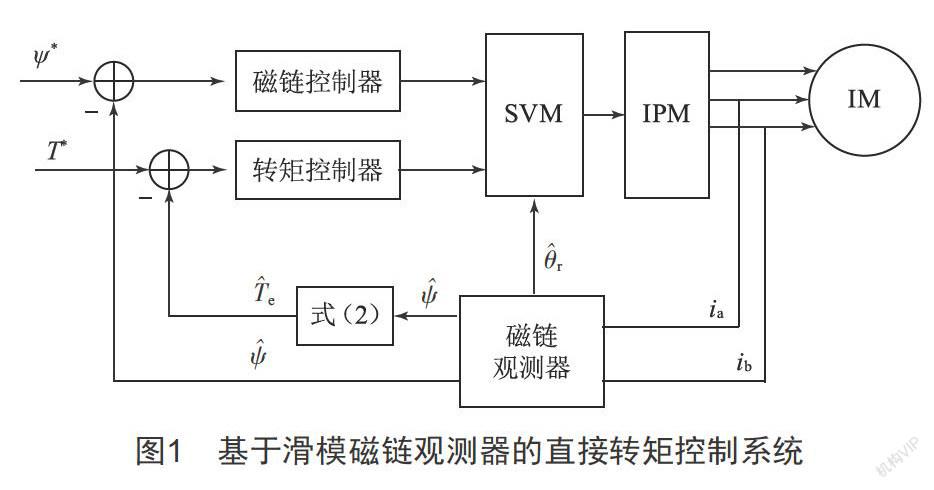
基于滑模磁链观测器的直接转矩控制系统如图1所示,该观测器在静止坐标系中实现定子磁链观测,通过定、转子磁耦合的函数关系计算转子磁链,通过转子磁链所在的空间位置实时计算转子位置。
2.1 滑模磁链观测器设计
电流参考值与估计值的误差分别为eids=ids-ds、eiqs=iqs-qs,滑模增益为Ks1、Ks2,k1、k2为矩阵常数,定子磁链观测器可设计为:
ds
qs=-Rsids
iqs+uds
uqs+k1 -k2
k2 k1eids
eiqs+Ks1 0
0 Ks2sgn(eids)
sgn(eiqs) (3)
在定子坐标系下,由定子观测磁链可知转子磁链估计值:
rds
=Lr
ds-Lm2ids,
rqs
=Lr
qs-Lm2iqs (4)
在转子磁链估计的基础上,得到转子位置信息:
ψr=tan-1(rqs/rds) (5)
