适用于室内导购系统的可见光定位研究
2021-09-10张悦乔琪
张悦 乔琪
摘 要:室内定位一直处于发展阶段,由于室内环境的复杂,基于WiFi、蓝牙、ZigBee等传统技术会受到电磁干扰、多径效应等因素的影响,存在明显的弊端,因此研究新型室内定位技术逐渐成为近年来的研究热点。随着LED技术的普及和发展,利用LED发出的可见光通信实现室内定位研究备受关注。文章比较了几种常见的定位技术,分析了各自的优缺点,通过对比研究选择RSSI测距定位算法,并通过MATLAB仿真验证了RSSI定位理论在室内导购系统中实现定位的可行性。
关键词:可见光;RSSI;室内导购
0 引言
近年来,随着经济发展的加快,全球自由贸易的频繁,各大城市都出现了许多大型购物商场来满足人们日益增长的生活需求。商场的面积巨大,货品繁多,导致人们很难在第一时间找到所需要的商品,因此设计一套适用于室内导购的定位系统显得尤为迫切。随着对可见光通信研究的深入,利用可见光实现目标定位逐渐变成一个热议课题。其原理是通过购物车上的设备接受可见光信息,通过后台计算获得定位信息。目前,可见光定位研究在几何定位、指纹定位等方向取得重大突破,主流的室内定位系统通过调频编码、解码获得目标物的位置[1]。
本文通过MATLAB仿真验证RSSI几何定位理论在室内导购系统中实现定位功能的可行性,为下一步研究精准定位提供理论及实验基础。这套系统硬件设备要求较低,可以实现商品较为精准的定位,便于顾客找到需要的商品,收集的大数据还可用于日后的数据分析[2]。
1 室内导购系统的框架
室内导购系统由3个部分組成:LED灯、带PD的多媒体终端、VLID编码设备。通过LED灯发出的可见光发射信号,装在购物车上的多媒体终端接收信号,通过定位可以在终端显示所在区域的商品信息[3]。
通过可见光的有效传输距离,对不同的光源进行编码,理论上是可以得到较为理想的定位结果。但在实际使用过程中,由于LED光源要兼顾室内照明,通常会出现相邻的两盏LED灯之间光源的相互干扰,还需要设计一套自适应不同光源数量的编码系统。在信号分析和转化的过程中还需要考虑时间,因此要求我们算法尽量高效,所以考虑不用编码方式定位,直接利用可见光定位。
2 定位系统的常见算法
Gratham Pang等人在1999年提出可见光通信的概念,并在低速智能交通中实现了可见光通信[4]。在日本成立了“可见光通信联盟”(VLCC)致力于研究可见光通信的各种应用。2011年GIULIO COSSSU通过三边定位算法及正交频分复用实现了室内定位,验证了可见光定位的可行性[5]。可见光强度的定位算法通过不同的光源加载不同的载波信号,以辐射强度的衰减为基础,依赖辐射强度完成定位[6]。目前适用于室内可见光定位的算法分几类:通过编码定位、几何定位、指纹定位法。以下为几种常见的几何定位方法。
2.1 TOA定位
TOA到达时间定位法的原理:利用可见光发射时间和到达时间的时间,结合位置算法来实现定位功能。由于光速太快,即使非常细微的时间误差也会导致定位结果较大的误差,因为要求发射端和接收端必须保持严格同步,这对设备硬件的要求极高[7],TOA定位原理如图1所示。
为了解决TOA定位的精度问题,可以使用可见光到达时间差的办法,即利用对不同光源的时间到达差求解位置,实现定位功能,避免了直接求解距离造成的高误差。
2.2 AOA定位
AOA到达角度定位原理:通过测量可见光到达的角度,推算位置信息,实现定位功能。通过接受不同光源发出的可见光信号,寻找两者相交点,计算位置信息。利用AOA定位需要外部设备的辅助,因此在使用过程中比较受限制,AOA定位原理如图2所示。
2.3 RSSI定位
RSSI定位的原理是根据发射端的信号强度以及接收端收到的信号强度,计算信号在传递过程中的损耗,从而估算发射端和接收端之间的距离,但在实际使用中总会受到一些不稳定因素的干扰,在不同的应用环境中受到干扰也不相同,定位精度还有待进一步提高,但RSSI定位对硬件要求低,响应速度快,如果综合考虑选用单一的定位算法,比较适合室内导购系统的定位算法首选RSSI定位。其中最简单的是三边定位法,如图3所示某一个RSS定位场景,假设接收端位于建筑物的底层,那么只要三个发射端不在同一条直线上,就可以计算出接收端的坐标值,而且这个坐标值是唯一的,也就实现了接收端的定位。
3 设计适用于室内导购系统的定位算法
在实现室内导购系统的设计过程中,设计师充分考虑实际场景的建筑要求:空间面积标准、通道最小净宽标准、照明标准等,在设计本文导购系统的定位算法时,照明考虑LED灯的发光强度,选择可见光直射链路,使用三边定位及最小二乘法优化结果,研究RSSI定位理论在室内导购系统中的可行性。
3.1 LED辐射模型
LED灯具有较高的寿命、较低的功耗。本系统中采用了白色LED灯作为信号光源,发光强度符合Lambertian辐射模型[8]:
3.2 可见光信道模型
可见光信道模型中采用两种模式:直射链路和非直射链路。这两种信道模式最大的区别在于是否有折射和反射,在实际的室内环境中,由于室内墙壁和其他物体的存在,因此在室内可见光通信中信号的直射链路和非直射链路均存在[9],接收端接收到的总功率为:
由于直射链路的功率要远高于非直射链路,PNLoS< 3.3 定位算法
常见的定位算法有三边定位算法,通过三个光源信息找到一组交点即完成定位,三边定位原理如图4所示。
通过下列方程可以计算出目标位置:
其中S1(x1,y1)、S2(x2,y2)、S3(x3,y3)为光源的坐标位置,则方程的解(x,y)为目标坐标位置。在实际过程中,由于噪声、反射等情况得到的测量值,常常需要用最小二乘法匹配最优解。最小二乘法具有:线性、无偏性、最小方差性。
本文通过对定点光源作为观测站,并记录观测站的坐標位置,通过同一观测站接收到目标物的RSSI信息测量 10次求平均值,通过3个观测站的RSSI信息利用三边定位及最小二乘法计算出目标物的具体坐标。LED的光照强度模块、传输信道模块、测量的RSSI信息及计算目标物的坐标由MATLAB仿真得到,通过模拟可见光传输信道得到,在模拟可见光传输信道中除了直射链路的传输模式,还充分考虑了噪声及误差,增加了噪声模块,为了使实验的结果更为可信。设计实验思路如图5所示。
4 基于MATLAB的RSSI仿真定位实验
在仿真实验中,采用一个6m×6m×3m的长方体模拟室内的一块区域,在4个顶点上放置4个LED光源,即L1(1.5,1.5,3)、L2(1.5,4.5,3)、L3(4.5,4.5,3)、L4(4.5,1.5,3)。di为目标物体与各光源之间的直线距离,li为目标物体与各光源之间的水平距离。
4.1 四盏灯的光照分布
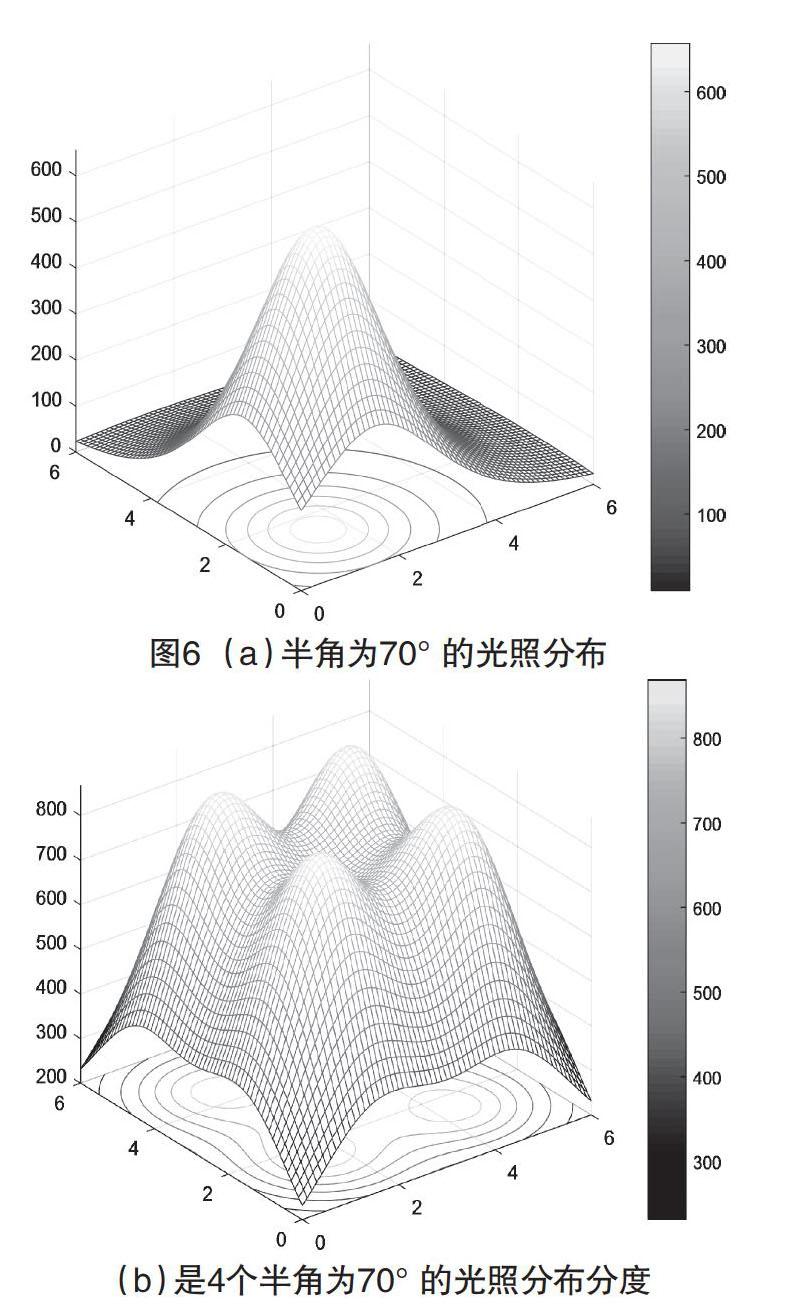
根据Lambertian辐射模型,利用MATLAB仿真出光照半角为70°的发射机光照分布图。图6(a)是一个半角为70°的发射器光照分布图,最大光照强度达到600IX;图6(b)是4个光照半角为70°的发射器的光照分布分度图,根据国际标准符合照明条件。
4.2 利用RSSI定位原理的结果分析
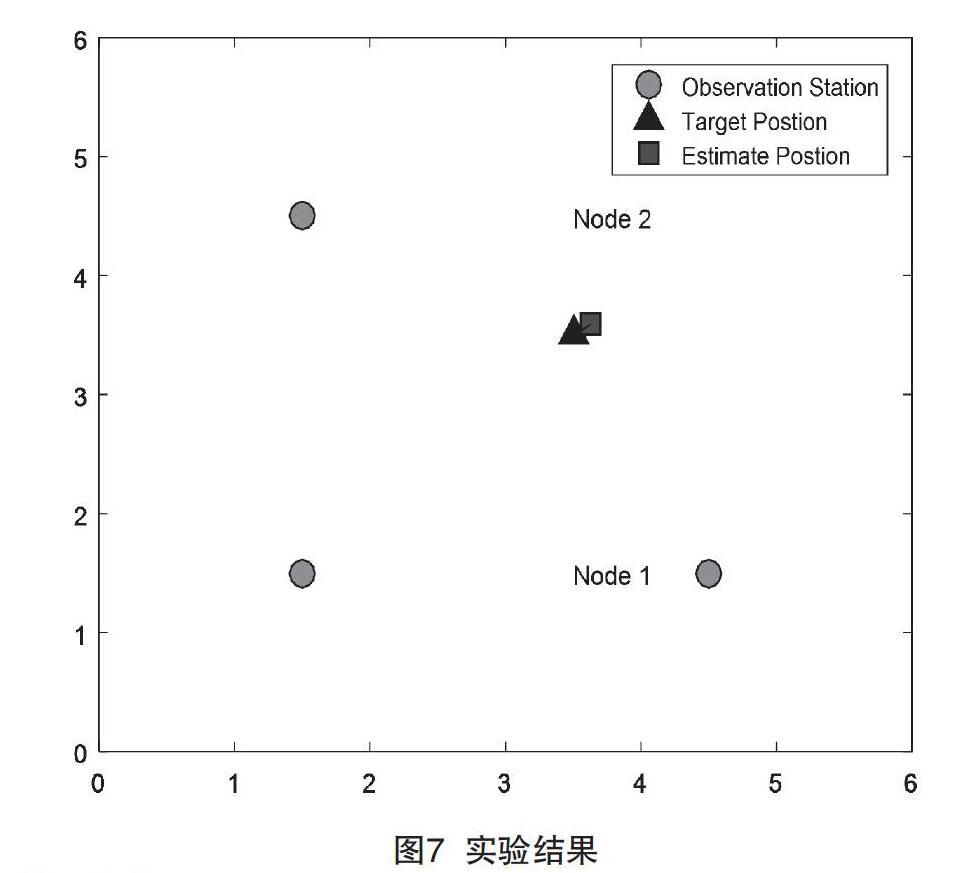
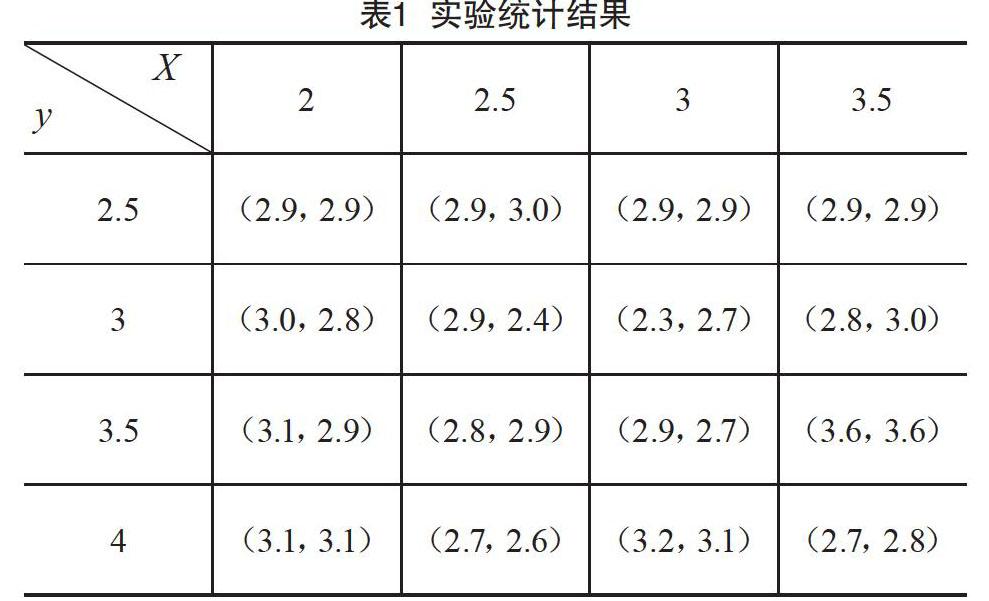
在6m×6m×3m的空间中,以x=2、x=2.5……x=3.5和y=2.5、y=3……y=4的交点划分出16个目标实验点,设置观测站(1.5,1.5)、(1.5,4.5)、(4.5,1.5)、(4.5,4.5),通过观测站对目标探测10次,以平均值为最终的RSSI值,根据采样的RSSI值求出观测距离,根据观测距离用最小二乘法估算结果[10]。实验中目标(3.5,3.5)的测量结果为(3.6,3.6)如图7所示。16个被测目标统计结果如表1所示。
5 结语
通过对现有定位理论的研究和对比,通过MATLAB仿真验证了RSSI定位系统在室内导购系统中的可行性,在室内导购系统中运用RSSI定位得到的探测结果,误差在可接受范围内。在实际运用过程中,由于光源在整个室内的排列,人们可以改进观测站的选择方法,从而得到更为精准的定位结果。本文的定位算法还存在很多改进的地方,后期可以从接收信号的去噪,RSSI算法的改进,考虑结合指纹定位算法等,研究一种算法简单、硬件设备要求不高、定位精度较高的室内定位算法。
[参考文献]
[1]刘大仁.基于可见光通信的室内定位技术研究[J].信息通信.2020(3):79-81.
[2]马哲东,曹新宇.基于MATLAB的可见光室内通信定位仿真[J].信息技术与信息化,2020(4):119-121.
[3]黄绪发.基于DDC算法的可见光通信的非线性补偿技术[J].软件,2020(4):106-110.
[4]陈诗航.基于LED可见光的室内通信与定位系统研究[D].南宁:广西大学,2019.
[5]廖舒安.基于多LED的可见光调制与定位技术的实现[D].大连:大连海事大学,2019.
[6]王科.基于接收信号强度的可见光室内定位系统设计[D].武汉:华中科技大学,2017.
[7]乔琪.室内可见光通信定位技术的研究[J].现代信息科技,2019(22):65-67.
[8]叶子蔚.基于接收信号强度检测的可见光定位方法研究[D].郑州:郑州大学,2018.
[9]王颖.基于室内可见光的通信和定位系统研究[D].苏州:苏州大学,2018.
[10]陈道钱.基于RSSI测距及位置指纹的室内可见光定位方法研究[D].杭州:浙江农林大学,2018.
(编辑 王永超)
