改进EDLines算法暨在高空输电线识别与巡检中的应用
2021-09-10陈荣保盛雨婷翁东波
陈荣保, 韦 盛, 盛雨婷, 翁东波
(1.合肥工业大学 电气与自动化工程学院,安徽 合肥 230009;2.淮南供电公司 计量管理中心,安徽 淮南 232007)
0 引 言
电力线路在能源建设中占有重要地位,输电线巡检保障国家电网安全。使用人工检修的方式,在测量的过程中消耗经济多、危险系数大、时间长等缺点,这将阻碍电力行业的发展,对电力系统的安全、管理与维护带来不便。然而旋翼飞行器近年来发展迅速,其优点不言而喻,体积小、速度与高度可控、精度高等优势。随着无人机和图像识别等技术的成熟,输电线巡检方案发生变革,以无人机搭载高清相机等各类传感器,完成输电线工作状态的巡检任务[1,2]。
无人机巡检过程中,采集拍摄图像背景复杂,易受树木建筑等环境干扰,图像识别时受阈值差异导致结果产生较大的变化,边缘检测目标间断会造成误检、漏检现象[3,4]。直线拟合时局外噪声点会影响结果的准确,须提高系统抗噪声干扰的能力[5,6]。线状背景干扰会影响无人机自主巡检时目标识别丢失,造成不可预估的损失,同时巡检需降低运算时间,保证图像处理实时性与准确性,因此输电线图像识别算法尤为重要[7,8]。
本文对数字图像处理技术在输电线的应用进行了研究,提出改进EDLines算法快速识别输电线路,方法可去除拟合直线时局外噪声点的干扰。根据输电线路的特征,使用K均值聚类算法滤除线状干扰背景,设计模板匹配优化目标,识别出完整的输电线方便巡检的应用。
1 EDLines设定参数
EDLines是基于Edge Drawing边缘检测的算法,在处理输电线图像数据时,根据搜索的锚点使用启发式算法进行绘制,可得到连续、细长的边缘。

图1 EDLines算法提取框图
1)梯度阈值
计算出各像素点的梯度与方向后,需要去除梯度值小于某个阈值ρ的像素点,因为当像素点的梯度值过小时,该像素点不经过图像的边缘,不会生成直线段。设置阈值ρ时,可忽略角度误差大于角度公差的点,当相邻像素的误差值为+1和-1时最大量化误差等于2,角度的公差为22.5°,梯度的阈值计算方法如下所示
ρ=2/sin22.5°=5.22
(1)
遍历梯度图中的所有值,去除小于阈值ρ的像素点,保留的像素点都是位于图像边缘之上。
2)锚点判定
设I(x,y)表示图像上某点在(x,y)处的像素值,其中{T1,T2,T3,…,T8}分别为当前像素与邻域8个像素的幅值差。锚节点是梯度中的一些极大值点,Tanchor为锚节点阈值,给定梯度阈值TanchorThresh,当I(x,y)≥TanchorThresh,则该像素点可能为边缘点。若Ix(x,y)≥Iy(x,y)并且T5≥Tanchor,T6≥Tanchor,则说明(x,y)是垂直方向的锚节点。当Ix(x,y) (2) 式中T0为水平或者垂直方向的平均赋值差,权重因子U′可通过下式计算 (3) 若权重因子U′≥1,则说明该点为锚节点。 3)扫描间隔 EDLines扫描间隔是设定图像行列搜索锚点时的区间大小,控制锚点生成的个数,数量多的锚点处理速度相对较长,选择合适的扫描间隔可以增强图像处理的效率。当间隔设置成“k”时,则ED算法搜索第k行/列的锚点。锚点数量减少时,输电线边缘图像的细节也会相应的减少。为满足检测的输电线图像线段的完整性,保留图像中所有细节的边缘,同时保证图像处理的效率,故本文将扫描间隔设置为1。 4)线拟合参数 NFA为错误报警的数量,计算公式如下 (4) 式中N4为图像中潜在线段的数量,n为直线的长度,p为直线方向的准确度。如果NFA(n,k)≤1时,检测出的线段为标准的直线,“k”等于“n”时生成最小长度的线段,计算可得NFA(n,n)=N4×pn≤1,则直线长度为 n≥-4log(N)/log(p) (5) 式中p=0.125。假设对于600×600图像,生成最小长度有12个像素。在使用算法拟合直线之前,通过公式计算出最小线段长度,将低于此有效值长度的线段剔除,高于有效值线段保留。 5)线段验证参数 线段验证是通过生成的直线长度与直线上对齐像素的个数决定。线段上两点P,Q的角度在π/n内,即对齐,精度为1/n。其中实验与具体的数据应该保持一致,“n”的数值最大应为8,在最大值的计算下,也就是角度在π/8=22.5°的两个点是在同一行的,有8个不同的行同时精度值篇p=1/8=0.125,在计算NFA中使用较频繁。 在输电线检测过程中,由于目标易受树木、杆塔、道路等复杂背景的干扰,提取出的线基元存在多种干扰噪声点[9,10],最小二乘法拟合直线时会产生不同程度的偏差,故本文使用随机抽样一致性(RANSAC)算法解决线基元含有高噪声点的问题。假定单个像素链包括N个像素点,在图像上对应的坐标是(xi,yi)(i=1,2…,N),RANSAC算法拟合输电线的像素链的步骤如下:1)单个边缘链线基元中的N个像素点,随机选取两个像素点。2)计算由得到的像素点连接组成的直线Line。3)计算其余N—2个像素点与Line的距离,统计出小于设定阈值T的点数量M,M是直线附近局内点的数量。4)按以上步骤迭代K次,当生成的M值最大时所得到的为目标直线,生成的直线包含局内点的数量是max{M},局外点数量N-max{M}。 聚类目标函数使用误差平方和,目标函数如式(6)给出 (6) 式中K为聚类的类别数,Gi(i=1,2,…,K)为第i个聚类簇,Di为聚类簇Gi中的数据对象,Ci为聚类簇Gi的聚类中心点,Obj为数据对象与聚类中心点距离平方和,可以看出,Obj数值越小,聚类生成的效果最好,需要找出使目标函数Obj数值最小的方法。 K均值的算法流程如下:数据输入参数为所需类别个数K,N个数据对象集D;数据输出参数为目标函数据输入参数为所需类别个数K,N个数据对象集D;数据输出参数为目标函数收敛的K个类。1)从N个数据对象中随机抽取K个数据作为初始中心Ci(i=1,2,…,K);2)计算其余对象与K个初始中心的距离,由最近邻准则可将所有对象聚类到距离最短的聚类中心所在的簇中;3)重新计算聚类中心,生成新的聚类中心点,同时计算新的误差平方目标函数Obj的值;4)若新的中心点之差在预先设定的阈值之内,则算法目标函数收敛,转步骤(5),得出结果;若新的中心点之差大于设定的阈值,转步骤(2),继续调整数据对象,直到算法达到收敛条件才可结束;5)输出K个聚类簇。 (7) 根据倾斜角集合,定义一个直线模板集合 ω={ω1,ω2,…,ω7} (8) 图2 直线模板对应关系 集合ω中的直线模板可通过逆时针旋转标准水平直线模板γ度得到,其旋转矩阵为 (9) 一个长度为7的简单水平直线模板可以为 (10) 1)在输电线图像上,使用改进Edge Drawing算法产生干净的像素链,连接生成的各个像素链,合在一起构成图像的边缘;2)在产生的像素链上,设置最小线段像素,用RANSAC算法拟合直线,提取出线段;3)进行线段验证,将提取达到的线段通过亥姆霍兹原理(Helmholtz principle)[11]去掉虚假线段,为后续精确检测输电线提供保障;4)去除背景线状干扰点,获得精确的直线参数和坐标。其中总体流程如图3所示。 图3 输电线算法流程图 在一组观测数据中,既有局内点也包含部分局外点,局内点为通过直线或依附直线边缘附近的点,而局外点则与直线产生一定距离。使用最小二乘法拟合直线时,因其需要尽可能包含全部局外点,造成直线与局内点存在偏差。然而,RANSAC算法的原理是通过局内点的数据得出模型,拟合出的直线包含局内点的概率高。使用RANSAC方法拟合直线,需要找出合适的算法参数,提高检测的准确度与合理概率。 如图4所示为一组数据分别使用不同的算法作对比,其中RANSAC的参数设定:模型阈值T=2;迭代次数K=20。结果显示:图中直观上就可以看出直线位置,但最小二乘法生成的结果却是错误的,这是由于图中存在较多局外点的数据,当只有少部分的数据符合模型时,最小二乘法就失去其作用,RANSAC算法可以有效解决此弊端。 图4 直线拟合算法对比 比较EDLines算法和本文改进算法的性能,进行提取图像中目标输电线对比实验,如图5(a)所示为实际拍摄原图像,图5(b)为原EDLines算法拟合直线得出的结果,图5(c)为本文改进EDLines算法生成的输电线目标,图5(d)为去除背景干扰得到的最终输电线。其中RANSAC参数设定:误差容忍度T=2,拍摄图像迭代次数K=30。 图5 输电线识别 在图5中可以看出,拍摄图像在使用最小二乘法时,噪声点位置的不同将产生不同的拟合效果,影响识别的精度。拍摄图像中输电线边缘干扰小时,表现为线基元局内点较多,局外点较少,拟合出的直线较为准确,当干扰较多时,表现为局外点多,会造成误检和漏检现象。而RANSAC算法拟合出的直线使其与输电线方向一致,排除了噪声点的干扰,减弱车道边缘的干扰,拟合出了正确的输电线。 结果表明:本文算法可以识别出全部的8条有效输电线,降低了外界因素对识别输电线的影响,提高了EDLines检测输电线的准确率,有效的实现了目标输电线的提取。 对单幅图片使用不同的误差容忍度与迭代次数,统计识别正确率如图6所示,为保证准确度和识别的速度,图像最佳参数设定T=3,K=30。 图6 不同参数识别的准确率 为了检验提取图像中输电线目标算法的鲁棒性,选取139张拍摄得到的输电线图像,共包含输电线400根。每帧分别使用EDLines算法与本文算法识别,统计识别电线数和有效匹配率绘制成柱状图,如图7所示。结果表明,对于不同环境背景下的图像,本算法在总电线数的有效匹配百分比高达94.7 %,相比EDLines算法,准确率增加了13.7 %,有效提高了实测视频图像中输电线路检测的准确性。 图7 拍摄图效果对比 综上所述,本文所提出的改进EDLines快速识别输电线算法,通过Edge Drawing算法产生干净的边缘链拟合直线,去除干扰背景,提高目标识别准确度,满足飞行器巡检的实时性。 本文提出一种改进EDLines算法用于检测输电线路。对采集的图像进行去噪处理后,连接图像中各个锚点实现边缘图的绘制,提高图像处理的速度。使用RANSAC算法在生成的边缘图中拟合直线,减少了局外噪声点对结果产生干扰,设计滤波算法精确提取输电线所在位置,使目标输电线清晰准确。使用大量的样本进行实验,结果表明:本文所提算法有效匹配率为94.7 %,解决了输电线在复杂环境下的识别问题。2 改进EDLines提取输电线方法
2.1 直线拟合随机抽样一致性算法
2.2 K均值聚类算法
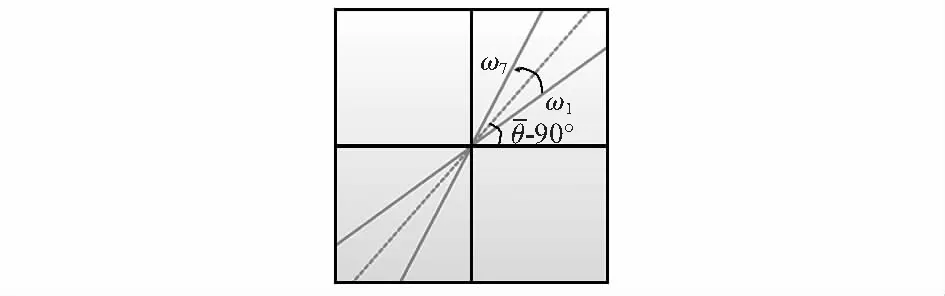
2.3 模板匹配优化目标


2.4 总体步骤

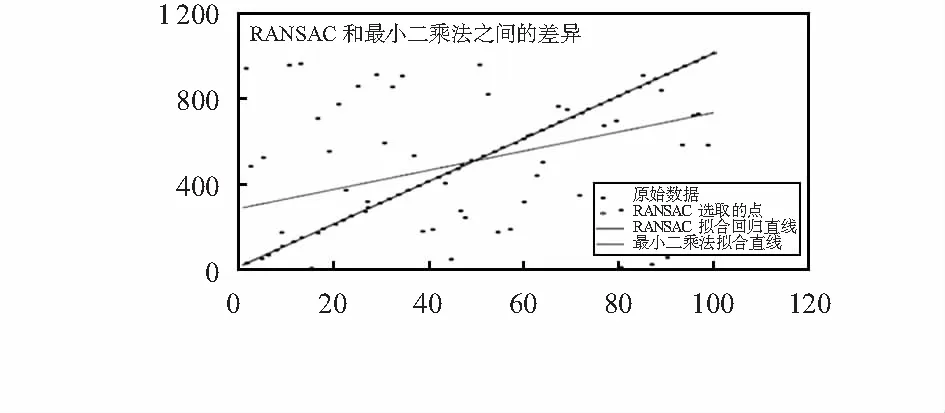
3 实验结果
3.1 RANSAC与最小二乘法结果对比
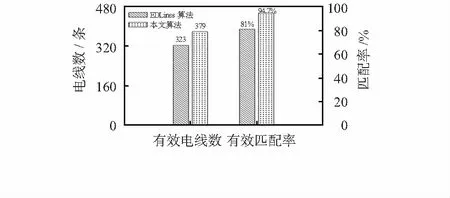
3.2 算法性能测试


4 结 论