Subsurface target recognition in Utopia Planitia of Mars by Tianwen-1 FP-SPR simulation
2021-09-10WANGYingFENGXuanLIANGWenjingLIXiaotianandXUECewen
WANG Ying, FENG Xuan, LIANG Wenjing, LI Xiaotian and XUE Cewen
College of Geo-Exploration Science and Technology, Jilin University, Changchun 130026, China
Abstract: As a cold and dry planet, Mars contains water resources in the form of water ice, so that the electromagnetic waves can be transmitted to the deep underground to get the information of the topography and subsurface geological structure. Subsurface penetrating radar (SPR) can be widely used in deep space exploration for a long time because of its non-destructive detection mode and its working characteristics not limited by visible light. It is an important type of equipment for detecting the subsurface structure of planets. Orbiter radar is mainly used in Mars exploration. However, because of its low resolution, it is difficult to describe the near surface structure, so there is a lack of radar data which can reflect the shallow information. In this paper, a three-dimensional near surface model of Utopia Planitia on Mars is established. In order to make the simulation results more reasonable, the key factors such as topographic relief, subsurface rocks and water ice, and the variation of dielectric constant in different layers are taken into account. Then the full polarization forward modeling is carried out by using the three-dimensional finite-difference time-domain method. The acquired full polarimetric subsurface penetrating radar (FP-SPR) data with noise is preprocessed and further processed by Pauli decomposition. The underground reflection can be picked up more clearly from the Pauli decomposition results. This work is helpful to identify more details of subsurface structures and provides a reference for the measured data in the future.
Keywords: 3D model; FP-SPR; Mars; Pauli decomposition
0 Introduction
In the process of Mars exploration, the probe includes an orbital probe and a landing patrol probe. The camera and spectrometer carried on it can obtain the terrain and surface rock distribution information of the observation area, while the detection radar can reveal the underground structure of the planet and help to analyze the evolution history of the planet. At pre-sent, the radar detection of Mars in various countries is mainly the subsurface penetrating radar carried on the orbital probe, with low frequency and large detection depth, which can detect hundreds of meters or even thousands of meters below the surface, but the depth resolution is low, generally tens of meters.
Many scholars analyze the data of Mars surface and ionospheric sounding advanced radar (MARSIS) and shallow surface radar (SHARAD), and get rich information. MARSIS observed a very thick elastic lithosphere beneath the stratiform sediments in the north pole of Mars (Picardietal., 2005), and the data at the stratiform sediments in the South Pole showed that the medium above the basement was almost pure water ice (Plautetal., 2007). The exploration of SHARAD in the middle latitude of the nor-thern hemisphere in the area of Deuteronilus Mensae shows that the tongue like debris slope is mainly composed of water ice (Plautetal., 2009). The data of Prometheus tongue like body in the Antarctic plateau can be used to draw a detailed subsurface stratigraphic map and identify several subsurface stratification interfaces of Antarctic layered sediments (Seuetal., 2007). Piqueuxetal.(2019) obtained the depth of shallow water ice in middle and high latitudes of Mars by fitting the seasonal underground temperature trend obtained by Mars climate probe and thermal emission imaging system. The analysis of the Martian hydrolo-gical model shows that due to the low temperature, water ice can be distributed on the surface with latitude greater than 40° in contact with the atmosphere, and can be stable at the depth of 1--2 m in low latitude area (Clifford & Hillel, 1983; Michael & Jakosky, 1995).
The early numerical simulation of Mars is mostly based on horizontal layered model, such as the two-layer model of weathered layer/bedrock medium of Mars (Campbell & Shepard, 2003; Jinetal., 2008),which cannot accurately explain the influencing factors of radar response. Later, the existence of impact crater is considered in the design of the model, and the simulation analysis is carried out (Liuetal., 2014). According to the influence of volume debris, frequency dispersion, ohmic loss and interface roughness, some scholars have developed radar simulator to accurately simulate the response of various geological conditions (Leuschenetal., 2003). All of these works are based on the low frequency radar detection, and the thousand-meter scale shallow model is designed for single polarization radar numerical simulation. There is a lack of corresponding theoretical model and simulation result analysis for the near surface fine detection.
China’s first Mars exploration mission includes an orbiter and a landing Rover. The lander’s candidate landing area is the Utopia Planitia. The full polarimetric subsurface penetrating radar (FP-SPR) carried on the rover is used to detect the thickness of Martian soil and distribution of layers. SPR includes two channels: the working frequency of low-frequency antenna is 35--75 MHz, and the frequency band of high-frequency antenna is 0.8--1.8 GHz (Zhouetal., 2016). On July 22, 2020, the China Mars Exploration Project officially released "China’s first Mars exploration mission Tianwen-1 1∶1 Landing Platform and Mars Rover", as shown in Fig.1.
In this paper, a three-dimensional near surface model of Mars is established, which comprehensively considers the variation of electrical parameters in different layers, topographical fluctuations, roughness of interface, rocks buried in Martian soil and water ice that may exist underground in low-latitude regions. The model consists of four layers, simulating the area of Utopia Planitia from the surface to two meters underground. Then use the finite difference time domain method to carry out the forward simulation of the FP-SPR. The acquired FP-SPR data with noise is preprocessed and further processed by Pauli decomposition. The underground reflection information can be picked up more clearly from the Pauli decomposition results.

(a) Tianwen-1 1:1 Landing Platform; (b) Mars Rover. Fig.1 China’s first Mars exploration mission
1 Establish 3D model of Utopia Plani-tia
The global rock survey results of Mars Global Surveyor show that the surface of Mars is mainly co-vered by basalt and andesite. The older surface of the south is rich in basalt, whereas andesite is concentrated in the younger northern plains (Bandfieldetal., 2000). Based on the possible subsurface structure of the Utopia Planitia, a four-layer three-dimensional realistic structure model was established (Fig.2), and the parameters are shown in Table 1. The size of the model is 4.5 m×0.8 m in the horizontal direction and 2 m in the depth direction. From the surface to the bottom, there are regolith, dry eolian sediment, ice-bearing eolian sediment and basalt formations filled with water ice in pores. On the top of the model,a vacuum layer (0.4 m thick on the surface) is placed so that the emitter can be placed 0.3 m above the surface (consistent with the distance from the SPR antenna to the surface of Mars). When designing the model, adding influencing factors such as topographical fluctuations, roughness of the interface, buried rocks in the soil and water ice makes the simulation results closer to the real situation. The model contains three pieces of water ice, whose centers inx,yand depth directions are (0.96, 0.62, 1.04), (1.44, 0.37, 1.22) and (2.95, 0.37, 1.16) in meters, respectively. The specific algorithms for constructing the model include using "Diamond-Square algorithm" to generate 3D stochastic fractal terrain, and abrasive grains to simulate irregular rocks and water ice (Zhangetal., 2018).
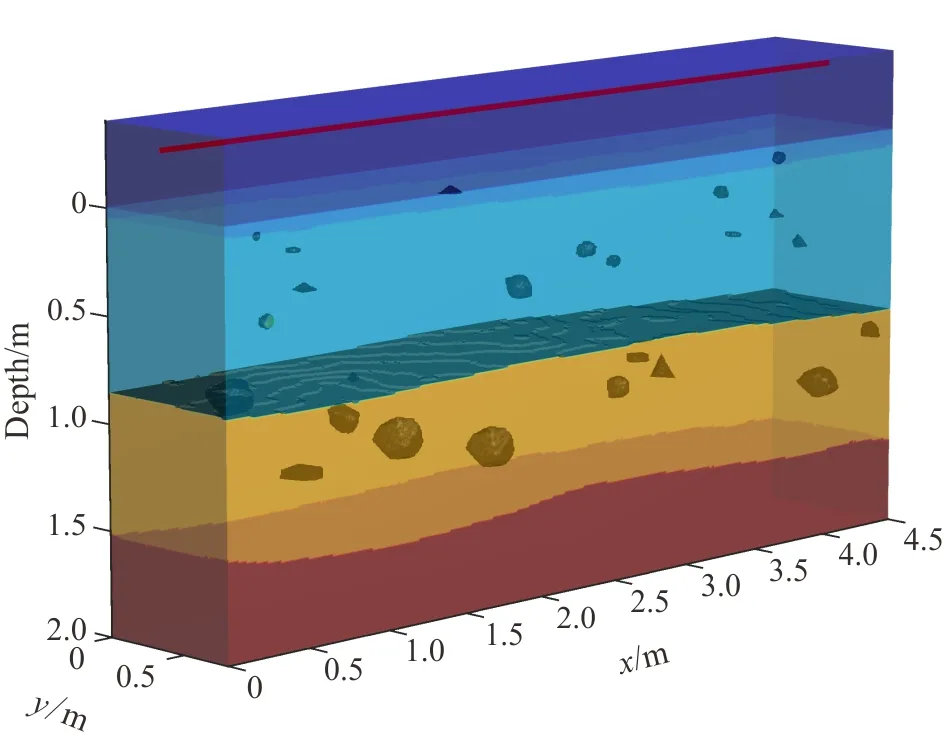
Fig.2 3D model of Utopia Planitia

Table 1 Parameters of three-dimensional realistic structure model
2 Simulation of 3D model
In this paper, three-dimensional finite-difference time-domain (FDTD) method has been used to simulate the 3D model of Utopia Planitia to obtain data of FP-SPR (Fengetal., 2011). The full polarimetric SPR system includes four polarization modes, VV mode, HH mode, VH mode and HV mode, in which HH and VV are co-polarization mode, HV and VH are cross-polarization mode. Hence, we will obtain data of four polarization modes after simulation, i.e.,VVdata,HHdata,VHdata andHVdata. The 1 300 MHz Ricker wavelet is selected as the emission source. In the forward simulation, the emission source is located 0.3 m above the Martian surface, and the survey line is arranged along thexdirection aty=0.37 m. The position of the survey line is shown in red line in Fig. 2. After obtaining the FP-SPR data, 10 dB Gaussian white noise is added to the FP-SPR data to simulate the influence of background noise in deep space exploration environment. After removing the antenna coupling, the profiles of FP-SPR data with 10 dB Gaussian white noise added are shown in Fig.3. Under the strong background noise interference, three stratigraphic interfaces can be seen in the co-polarization data section, which are located at the time depth of 3.7 ns, 13 ns and 23.5 ns, respectively. The cross-polarization mode is insensitive to the horizontal interface due to polarization rotation, so it is difficult to pick up effective signals from the profile.
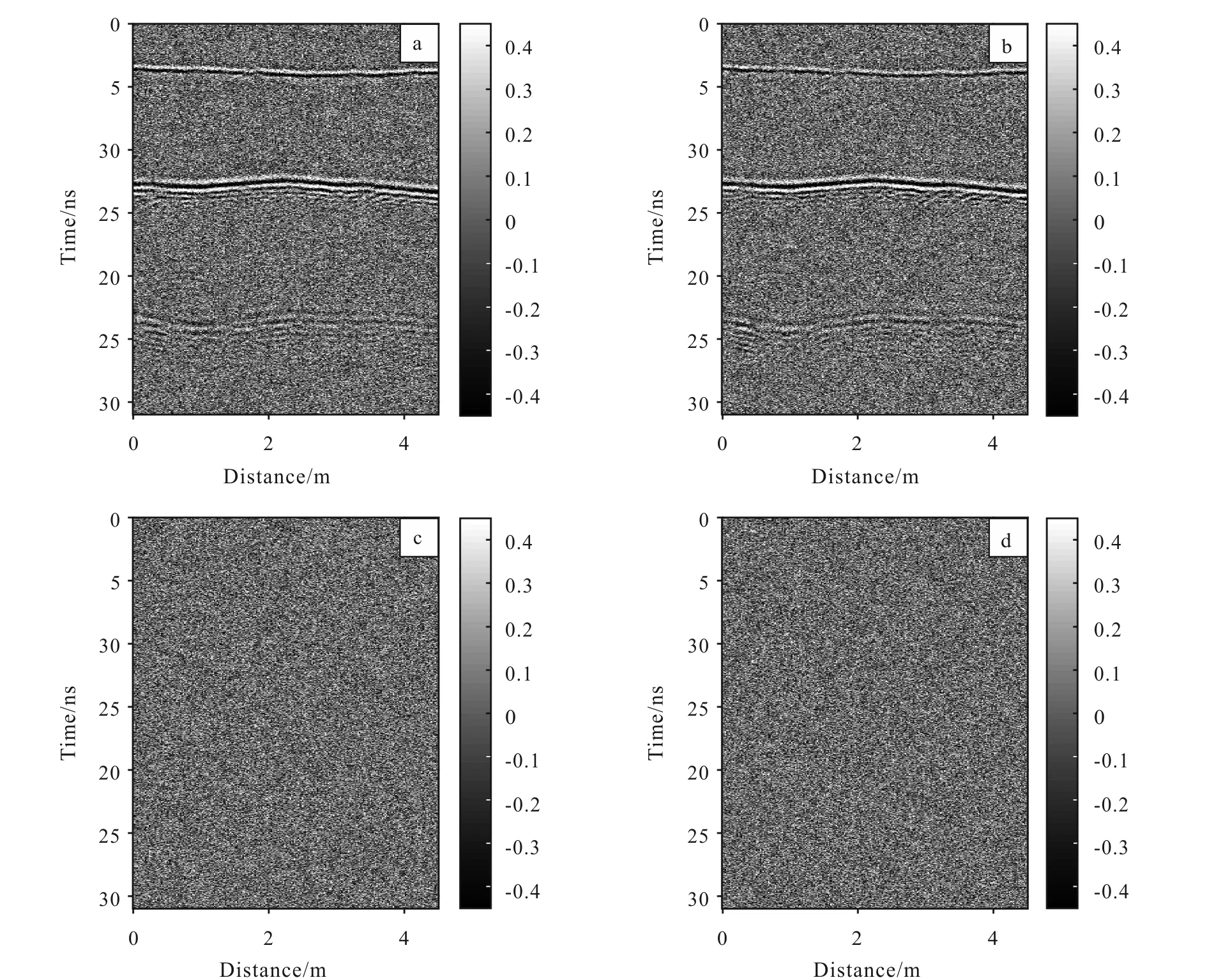
(a) VV mode; (b) HH mode; (c) VH mode; (d) HV mode.Fig.3 Profiles of FP-SPR data with 10 dB Gaussian white noise added
3 Identify subsurface targets
3.1 Preprocessing of full polarimetric SPR data
Firstly, band-pass filter is used to remove part of the background noise. Then the layer velocity of each layer is determined by velocity analysis, and then the root mean square velocity is calculated for Kirchhoff integral migration. The preliminary results are shown in Fig. 4. By observing the radar profile, we can find that: in the profile of co-polarization mode, the reflection information of each layer is clearer after filtering; migration makes the diffraction wave from the reflector converge, the energy is enhanced, and the position information of multiple reflectors between layers can be seen. However, the unremoved background noise will still interfere with the reflector, which makes it difficult to extract reflection information manually. In the cross-polarization mode section, filtering and migration make the section present many irregular reflection waves, but if observing this profile only, it is difficult to pick up the position of interfaces and reflectors from the clutter reflection waves.
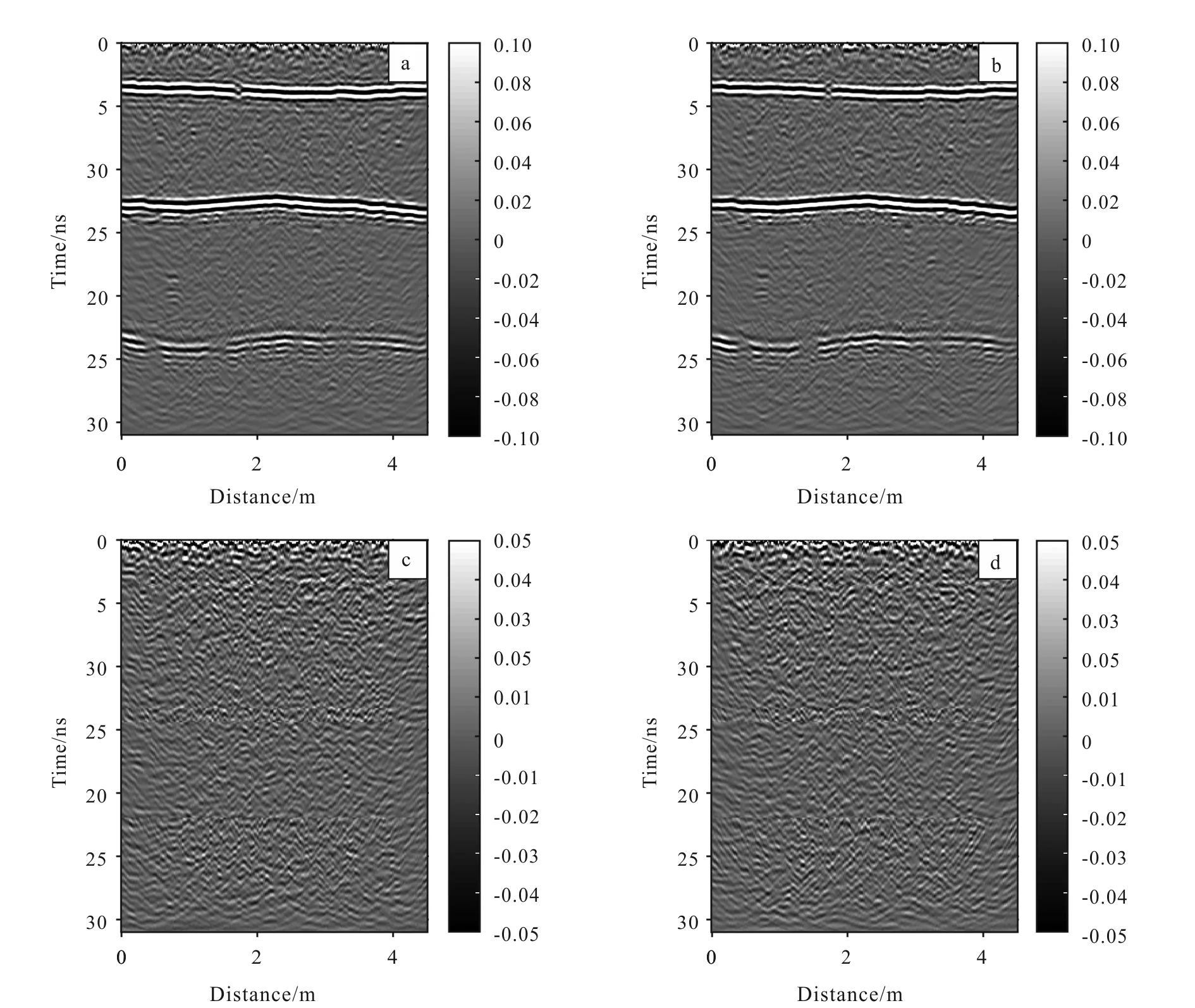
(a) VV mode; (b) HH mode; (c) VH mode; (d) HV mode.Fig.4 Profiles of preprocessed FP-SPR data
3.2 Recognition of underground objects using Pauli decomposition
The preprocessed FP-SPR data can form the following scattering matrix:
(1)
Since the antenna system satisfies the principle of reciprocity, VH and HV are regarded as the same polarization mode (Fengetal., 2011). Sosvh=shvand the Formula (1) can be changed to (2).
(2)
The target decomposition of FP-SPR data is mainly based on the scattering matrix of polarimetric data to reveal the physical manifestations of different scatters, so that the polarization information can be better understood and used to extract the attributes of the target. Pauli decomposition is based on polarimetric scattering matrix [s], which is a method of extracting polarization characteristics by defining different polarimetric basis matrices. Different polarimetric basis matrices represent different types of ground objects.
The Pauli basis{[s]a, [s]b, [s]c} can be re-presented by the following matrix:
(3)
In general, the matrix [s]arepresents the single scattering; the matrix [s]brepresents the scattering mechanism of dihedral; and the matrix [s]crepresents the volume scattering.
Based on the defined Pauli basis, the scattering matrix [s] can be written as follows:
[s]=α[s]a+β[s]b+γ[s]c
(4)
In the formula,α,βandγare the coefficients representing the contribution of [s]a, [s]band [s]c,
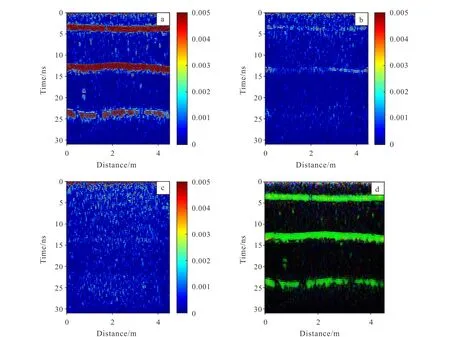
(a) |α|2; (b) |β|2; (c) |γ|2; (d) RGB image.Fig.5 Results of Pauli decomposition
to [s], respectively (Fengetal., 2015). They are given by:
(5)
Since the total power remains the same. The Frobenius norm (Span) of the scattering matrix [s] is given by:
SPAN=│shh│2+│svv│2+2│svh│2
=│α│2+│β│2+│γ│2
(6)
Pauli decomposition is used to process the FP-SPR data, and three parameters,α,βandγ, are obtained. |α|2, |β|2and |γ|2are used to represent the intensity of the three scattering mechanisms, and the profiles are shown in Fig. 5. It can be found that the strata and reflectors show strong single scattering characteristics, and the reflection signals of strata interface and underground reflectors can be obtained from the single scattering profile. The even scattering profile only shows formation information, and the interface reflection at 25 ns is weak due to attenuation. The effective information could not be picked up in the volume scattering profile. We fuse the above three parameters to draw RGB image, in which single scattering is represented by green, even scattering is represented by red, and volume scattering is represented by blue. The results are shown in Fig.5d. The layer information can be clearly seen from the RGB image, and the interlayer reflectors present weak energy clusters, which can also be picked up from the image.
4 Conclusions
In this paper, a three-dimensional realistic structure model is established and numerically simulated based on the possible subsurface structure of Utopia Planitia (the candidate landing area of China’s Tianwen-1 Mars mission). Influencing factors such as topographical fluctuations, roughness of the interface, buried rocks in the soil and water ice are added to make the simulation results closer to the real situation. Subsequently three-dimensional forward simulation along thexdirection aty=0.37 m is performed to obtain FP-SPR data. The results show that the noise-containing radar data is interfered by strong background noise, and band-pass filtering cannot effectively remove the interference. It is still difficult to pick up the interlayer reflector information from the profile. On the basis of preprocessing, Pauli decomposition is further used. It is found that the stratum interface and the reflector showed strong surface scattering characteristics, and the rough stratum interface also showed even-scattering characteristics. The fused RGB image combines the information of three parameters of Pauli decomposition results, which shows that the surface scattering intensity of formation interfaces and reflectors are higher than the other two scattering intensities.
杂志排行

Global Geology的其它文章
- U-Pb-Hf isotopes and petrogenesis of Late Jurassic akakitic quartz monzodiorite in Xingcheng area, western Liaoning Province
- Characteristics and sources of ore-forming fluids of South Narimalahei copper polymetallic deposit in East Kunlun, Qinghai
- Structural characteristics and hydrocarbon accumulation in Bashituo area, Tarim Basin
- Application of topography fast marching method in landslide
- A voxel-based fine-scale 3D landscape pattern analysis using laser scanner point clouds
- Super-resolution reconstruction based on CNN: A case study of Jilin-1 multispectral data