TKD提升机电控系统探讨
2021-09-09张雷
张 雷
(龙煤七台河矿业有限责任公司新富煤矿,黑龙江 七台河 154600)
1 TKD电控系统动力制动的自动调节
制动力矩的大小是通过闭环调节的,由磁放大器AM3来实现。AM3为内正反馈接线,其工作特性如图1所示。
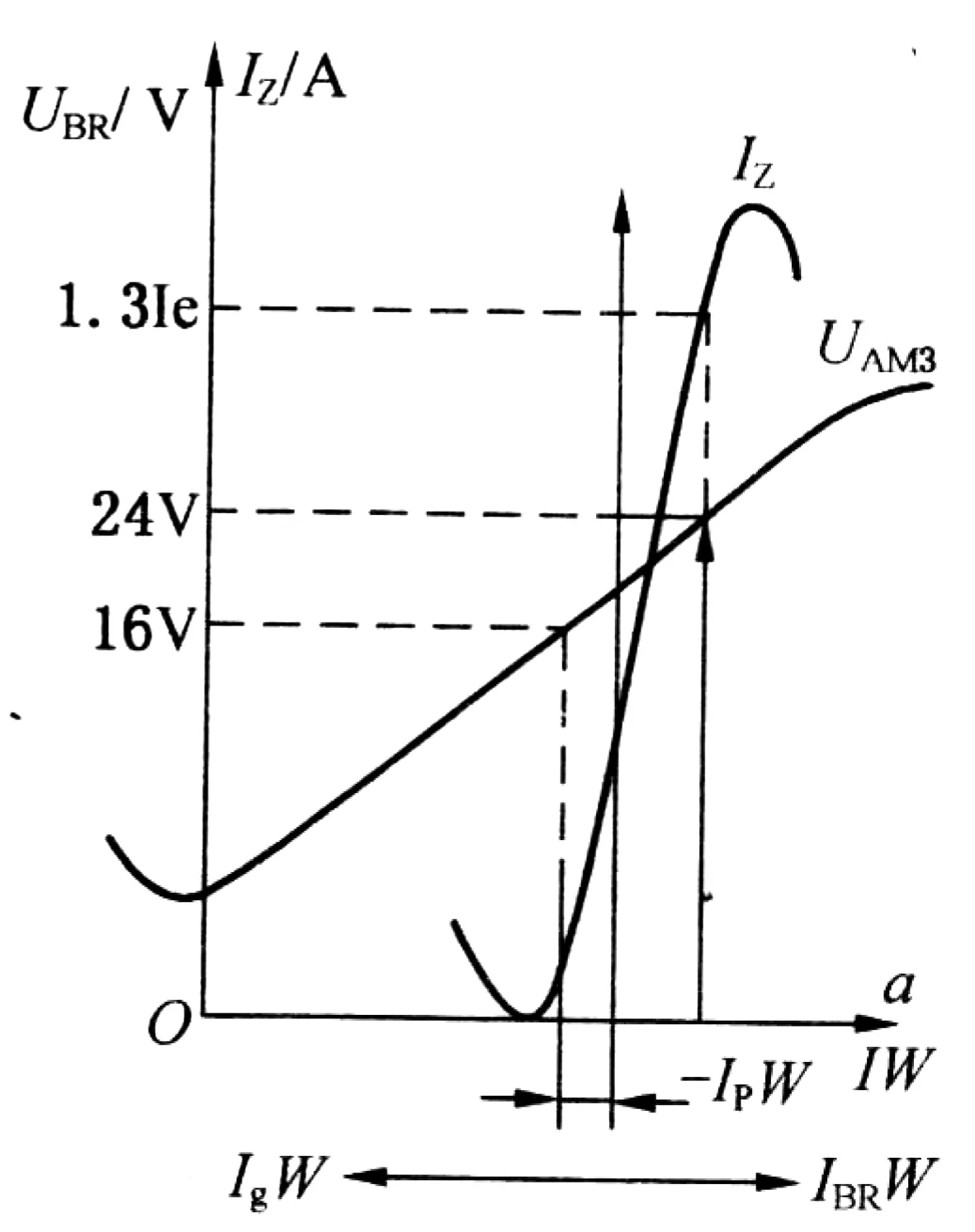
图1 动力制动放大器AM3特性
纵轴为磁放大器输出电压UAM3和制动直流电流Iz,横轴为控制磁势IW和晶闸管导通角α,静态工作在A点。当无速度偏差时,给定速度负激励IW等于测速正激磁IBR,调整负偏回路中的电阻RT17、Rt18。负偏移磁势IPW使工作特性沿IW轴方向移动,使输出电压UBR为16 V,该电压即为KZG整流柜触发回路的固定偏置电压,整流柜输出直流电流近于零,当超速2.5%时,AM3输出电压为24 V,该电压超出固定偏置电压8 V,KZG整流柜输出电流最大,约为提升机额定电流的1.3倍,制动力矩达到最大值。减速过程中,实际速度等于或小于给定速度时,动力制动不起作用。实际速度大于给定速度时,出现与速度偏差成正比的制动力矩,使提升机迅速减速,根据给定速度运行。
2 TKD提升机电控系统可调闸制动转矩手动与自动调节
可调闸是操作人员利用制动手柄控制的机械制动闸,它有两种工作状态:一是手动开环调节,二是带速度反馈的闭环自动调节。可调闸制动器出现的制动力矩与流过电液阀线圈KT的电流有关:KT线圈电流为零时,为全制动状态;电流增大时,油路压力增高,制动力矩减小。通常在电流为250 mA时,为全松闸状态,其原理如图2所示。
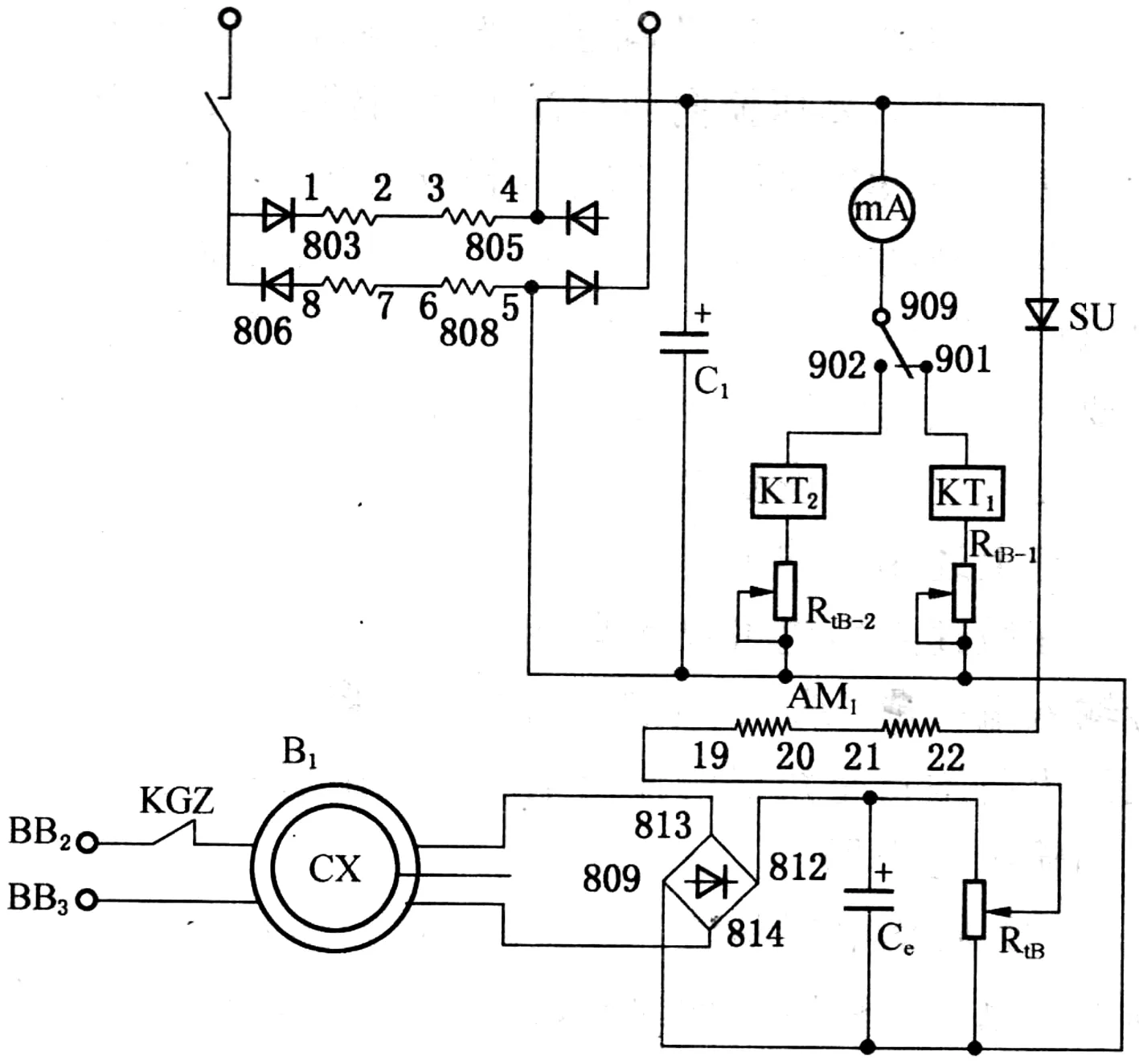
图2 TKD电控系统可调闸原理图
不管采用何种方式调节制动力,都是通过磁放大器AM1实现的。
2.1 操作人员参与的手动调节流程
在全松闸位置时,调节自整角机B1输出回路中的电阻Rt8,使812、808间的截止电压略高于AM1输出端805、808间的电压,由于二极管5 V的作用,AM1负反馈绕组19~20、21~22中无电流。需要制动时,司机适当将工作制动手柄拉向制动位置,B1的转角减小,812、808间截止电压下降,AM1的输出电流将经负反馈绕组22~21、20~19流通,产生电压负反馈的作用,将特性曲线坡度变缓并沿IW轴方向移动,AM1转移到B点工作,KT线圈内电流减少,液压站油压降低,盘形闸产生制动力矩。工作制动手柄的角位移决定了负反馈量大小,从而决定了制动力矩,如图3中B点、C点所示。
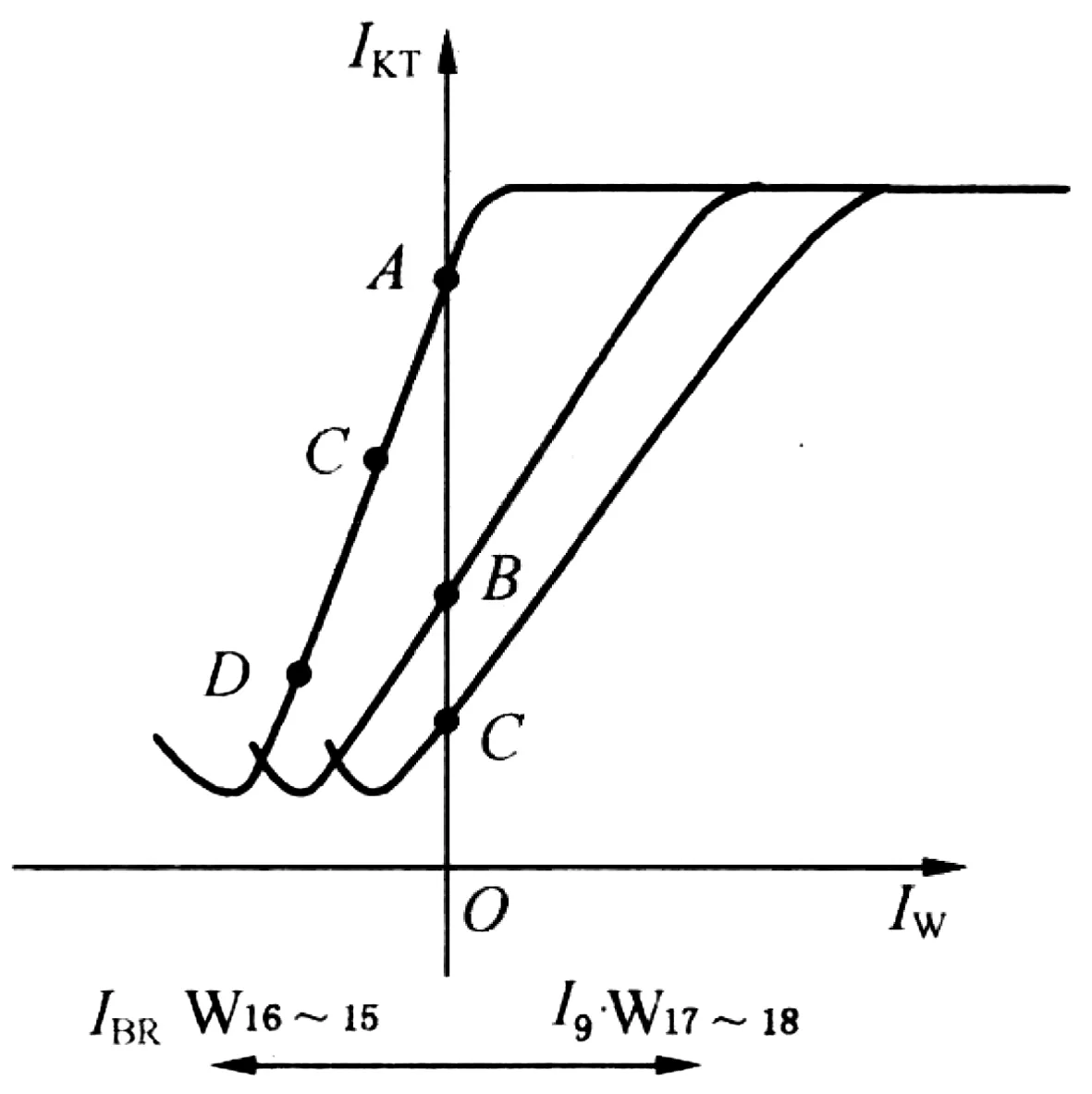
图3 可调闸AM1磁放大器工作特性
2.2 自动控制调节流程
工作制动手柄置于松闸位置不动。给定速度电压信号由深度指示器限速圆盘上的凸轮板压自整角机B5给出,加于AM1的17~18绕组为正激磁。实际速度电压由测速发电机回路516、518两点引出,加于AM1的16~15绕组为负激磁。两者进行磁比较,其差值决定AM1的输出。
给定速度大于实际速度时,AM1为正激磁,其输出仍为最大电流,盘形闸仍处于全松闸状态。
给定速度小于实际速度时,AM1为负激磁,工作点由A下降至D,输出电流减少,盘形闸产生制动力矩。制动力的大小取决于速度差值,差值越大,负激磁越大制动力越大,直至实际速度降低,等于设计速度为止。差值为零,AM1又工作在A点,处在全松闸状态。
3 提升机的二级制动
提升机进行安全制动时,把全部制动力矩分两次投入,延时制动。第一次投入的制动力矩使提升系统出现满足规定的减速度,经过一段整定的延时,第二次将全部制动力矩投入,使提升系统平稳可靠地停止运动,这种实现安全制动的过程即二级制动。
4 提升机微拖动装置
当主提升机箕斗进入卸载曲轨时,需要稳定低速爬行,这是自动化运行实现准确停车和安全运行的必要环节。微拖动装置是获得稳定低速的重要方法,其原理如图4所示:
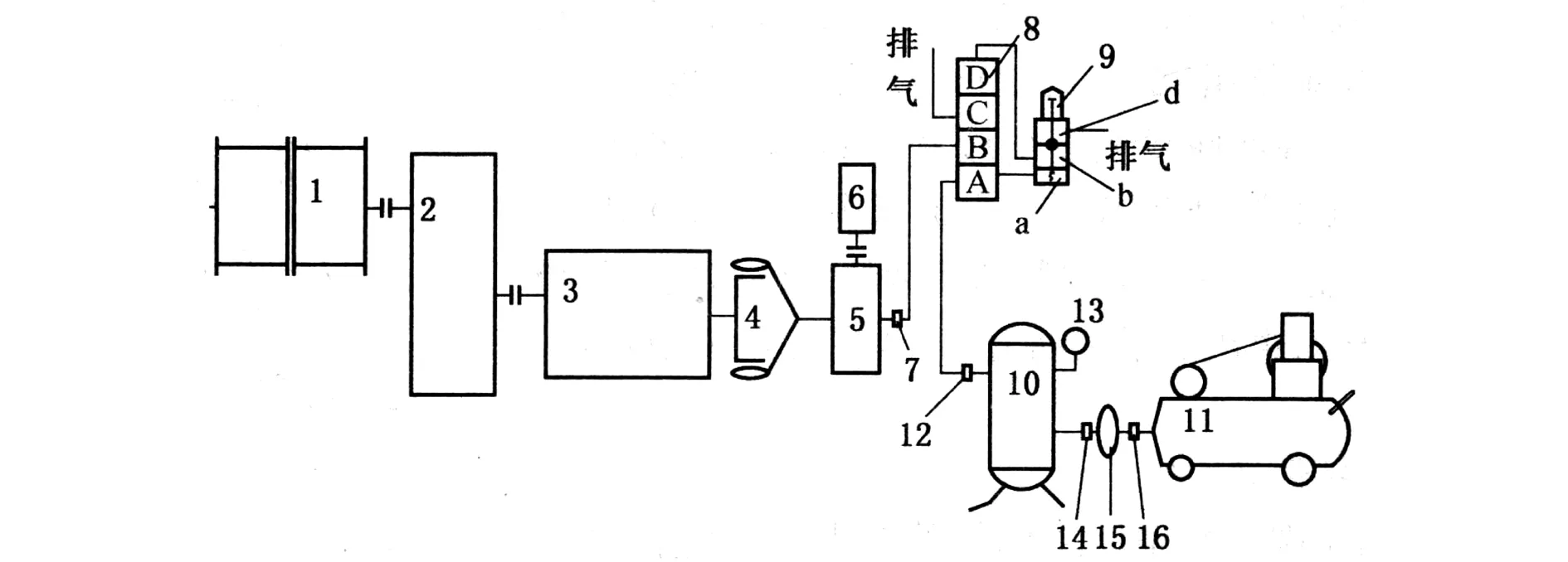
1-滚筒;2-主减速机;3-主电机;4-气囊离合器;5-微拖减速机;6-微拖电动机;7-地气装置;8-执行阀;9-电磁阀;10-风包;11-空气压缩机;12-安全阀;13-电触点压力表;14-止回阀;15-过滤器;16-截止阀
微拖动装置投入过程:当提升机开始减速或速度降到3 m/s左右时,微拖电动机6起动空运转,提升速度降到l m/s左右时,由速度继电器控制使电磁阀9通电,其阀杆下压,a与b腔连通,此时压缩空气由风包经8腔至a腔至b腔进入c腔,压下执行阀活塞杆。(此处整句已删除)气囊离合器4充气后,将微拖动装置与主机连接起来。提升速度降到略高于爬行速度时,切除主电动机的动力制动电源,提升系统即由微拖电动机带着进入平稳的低速爬行。提升容器到达终点时,电磁阀9断电,由于弹簧作用,其阀杆上移,a腔与b腔被隔断,b腔与d腔连通,c腔的压气经b腔、d腔排出,此时执行阀活塞由于弹簧作用上移。
5 提升机低频拖动
利用低频3~5 Hz交流电源直接送入主电机,使其低速运行,拖动方式用低频电源实现。电机转速高于由低频电源产生的同步转速时,能获得低频发电制动效果。为增大制动力矩,逐级切除电阻,速度逐渐下降,直至全部切除电阻,电动机运行到低频电源所形成的自然特性曲线上,这时提升机负载不管是正力还是负力,都会稳定于爬行速度。
