地铁闸机扇门控制系统的设计研究
2021-09-07王春行
王春行
(广州新科佳都科技有限公司,广东 广州 510653)
1 地铁闸机的组成结构
1.1 地铁闸机简介
闸机是一种通道阻挡装置(通道管理设备),其设立在地铁车站的入口处,用于管理人流并规范行人出入,主要应用于地铁闸机系统、收费检票闸机系统,是每个地铁必备的设备之一。但由于人工操作容易失误且缓慢,所以自动检票闸机受到轨道交通的青睐。其核心作用是自动检验乘客的车票是否有效,分为进站闸机和出站闸机,由电子识别系统自动识别车票中的相关信息是否与当前乘车的信息相符,且一次只能通过一人,当票面被损坏或车票过期,与当前乘车使用的相关信息不符时,闸机会自动将乘客拦截在外,无法进站或出站,当电子识别系统发现其票面信息不符时,会立即自动落下闸板,作用及目的就是为了有效防止乘客逃票乘车。
1.2 地铁闸机的组成结构
地铁闸机主要是由扇门控制系统模块、读写模块、回收模块、状态显示模块、乘客信息模块、电源模块、加热模块、电路模块以及维护模块所组成,具体构成框架如图1。
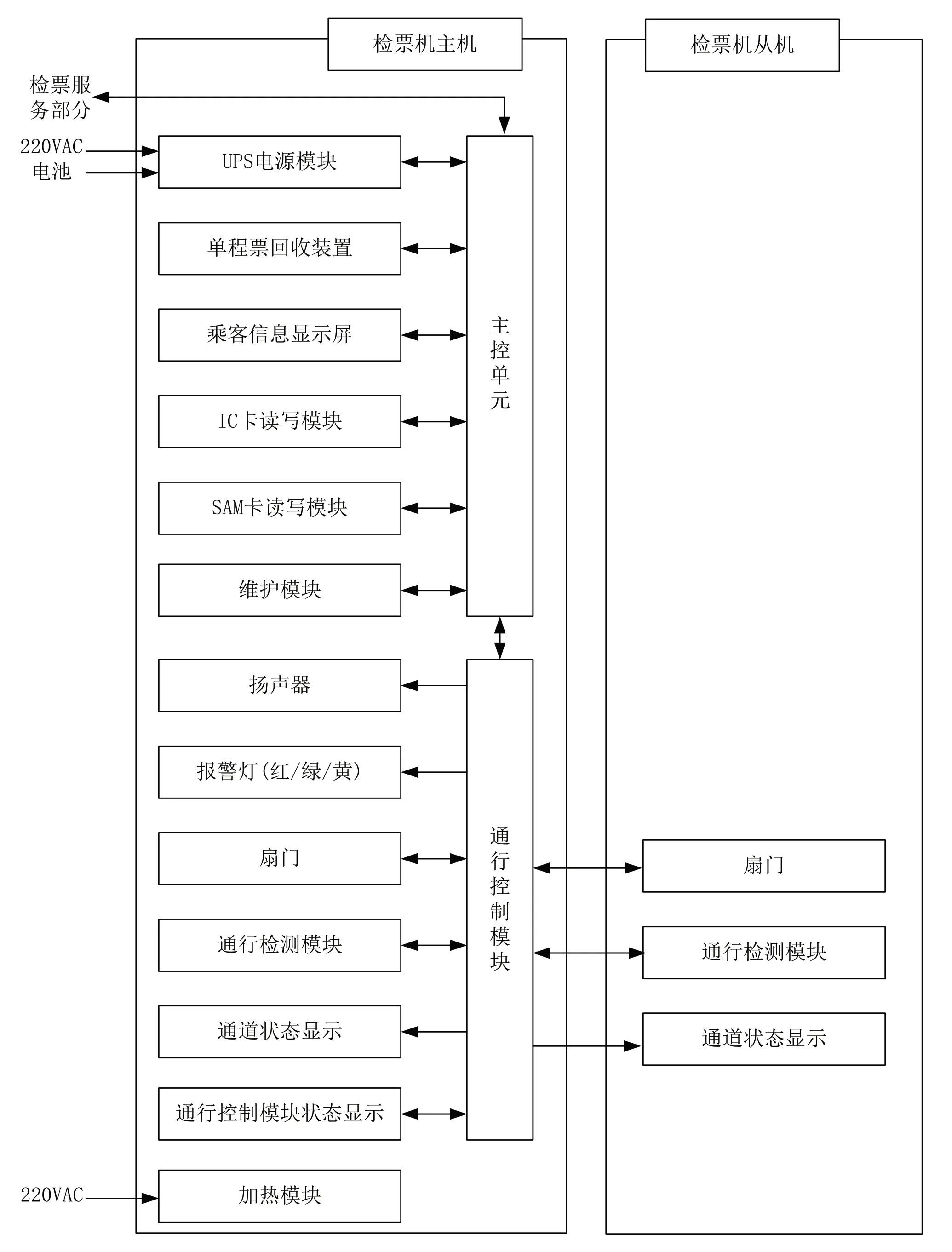
图1 地铁闸机组成结构图
1.3 地铁闸机扇门控制系统组成结构
地铁闸机扇门控制系统主要是对乘客进出次序、方向、人数等状态进行控制,它能够实时监测乘客在通道中的行走情况,并保障持有效车票的乘客安全、顺利通过闸机。若有些乘客的行为出现异常时(如:成人乘客之间通行没有保持三十厘米距离,或是有乘客想非法尾随通行),扇门控制系统便会将非法通过的乘客拦住。而扇门控制系统主要由电源、接口、左、右扇门控制板、信号采集板以及工控机所组成,左、右扇门控制版主要是控制扇门的开关。
信号采集版主要是通过传感器采集乘客经过闸机通道的行为,然后上传所采集到的数据信息;工控机根据所采集到的乘客行为信息数据进行分析和处理,并根据乘客的行为发送指令给左、右扇门控制板,使左、右扇门能按照指令同时开或关。具体组成结构如图2 所示。
2 地铁闸机扇门控制系统设计
2.1 传感器位置的布置
为了保障乘客顺利通行,及时检测乘客在通道中的行为、位置及方向,还需要在闸机外壳上按照传感器。但由于人体比例结构有所差异,为此在布置传感器位置时,必须要围绕人体结构之间的关键点(如:人体的踝关节、膝关节、腕关节、肘关节等位置)进行布置,从闸机入口处到扇门处1000mm 左右的区域内布置传感器(见图3),该区域内设置有判别区、检测区,安全区等,为此可在通道最前端,也就是人体膝盖的位置处按照两个传感器,用于识别乘客的行走方向;其次,在检测区的上端也就是人体肘关节的位置布置3 个传感器,用于检测通道中乘客人数,布置时3 个传感器之间的距离稍微大一些,以避免因乘客行走时摆动手臂而给传感器带来干扰;而在安全区通道两边可布置4 个传感器,当传感器检测到乘客已经行至安全区域时,扇门不会关闭,以免夹伤乘客[1]。
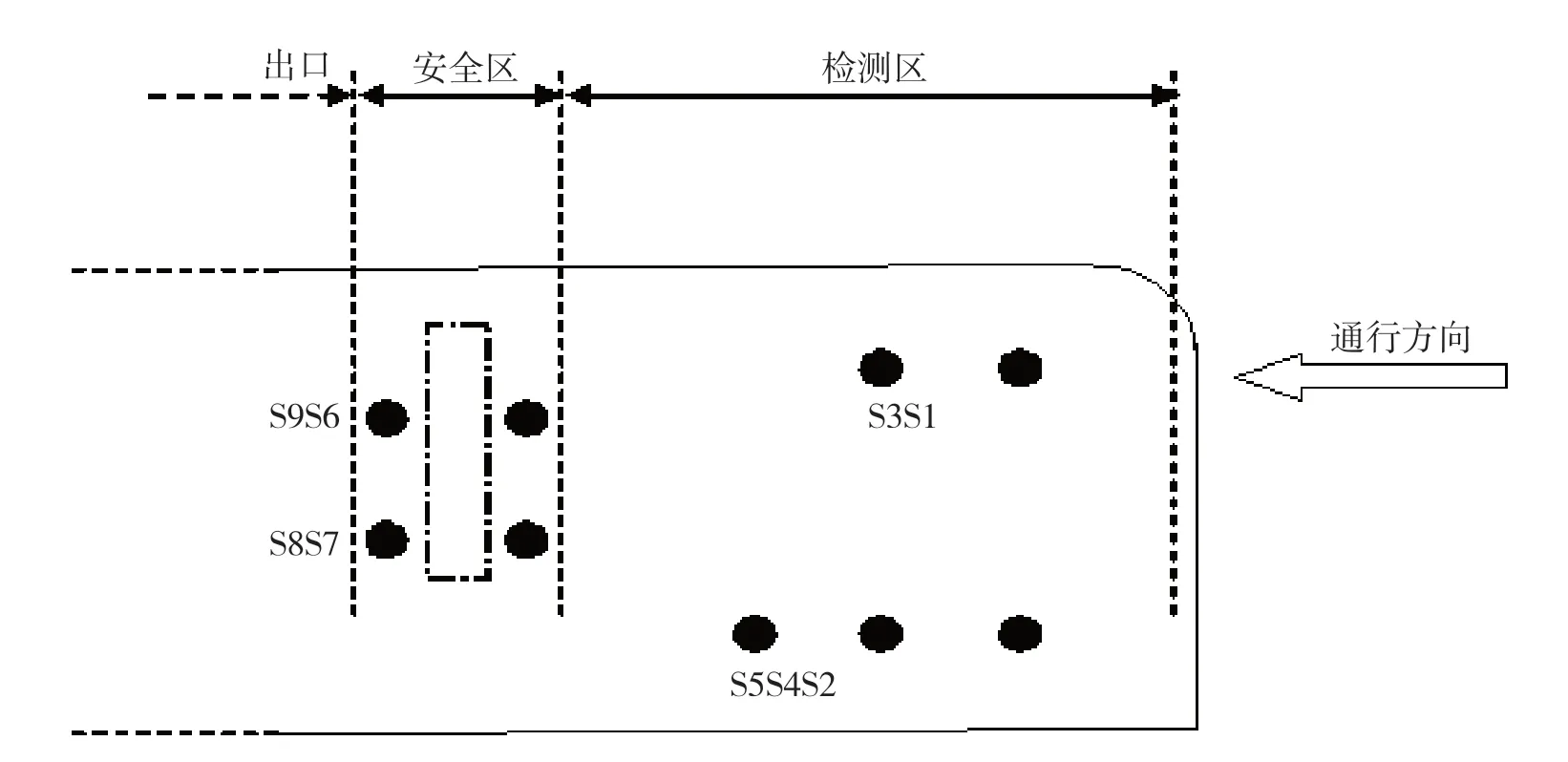
图3 闸机一侧传感器位置布置图
2.2 乘客识别系统设计
乘客识别系统主要是检测识别乘客正常通行,防止有的乘客为了逃票而出现多人通过的行为。但在日常检测中,由于乘客穿着服装等问题,导致识别系统不能准确检测到乘客的走动情况时有发生。为此,在乘客识别系统设计中,可进行区域分类设计,如:边界区设置传感器。在检测区的边界区域内设置上下检测点,当乘客没有刷卡便踏入边界区时,任意一个检测点便会识别出而会发出警报,以防止乘客进入;在对进出检测区设计时,可根据人体身躯厚度的特点在进口检测区域和出口检测区域分别设计三个检测点,主要是为了防止识别不到而出现漏检情况的发生;安全检测区,则需要根据人体身高的特点设置检测点,这样是为了系统能够识别到幼童,而避免出现检测不到的情况发生(图2)。

图2 闸机扇门控制系统结构框架图
2.3 传感器状态读写

图4 乘客识别流程图
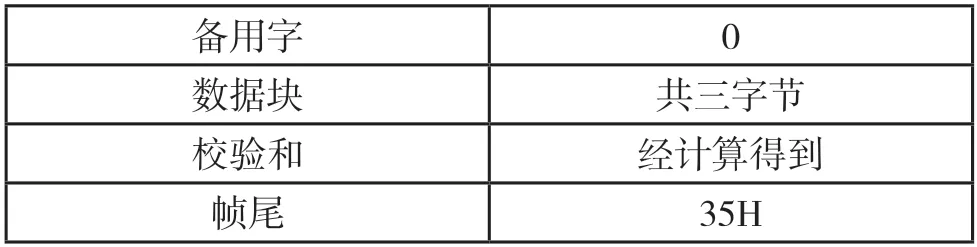
为了能实时采集到各个传感器的状态信息,还需要进行读采集系统模块和读写模块程序的设计,因为系统在运转过程中,上位机一直处于待命状态,而下位机也只能是采集传感器的状态,但并不进行储存,只有上位机发送读命令时,下位机才会将所收集到的状态信息上传。为此,在设计系统程序时,可以设定主程序和串口接收中断程序。主程序主要用于采集各个传感器实时状态,并进行储存;串口接收中断程序主要是在接收到上位机的读传感器状态命令时(见表1),对数据进行检验后通过串口将数据进行上传。而读写程序主要是将扇门运作中的一些重要数据写入E2PROM 数据寄存器之中,这样能有效保存这些重要数据,即使系统断电或下位机中断工作,系统内的数据也不会丢失。

表1 上位机读传感器状态数据图
2.4 扇门控制电路设计
2.4.1 控制电机的电路
无刷直流电机作为控制扇门启动、关闭的电机,也是扇门控制效果好坏的关键。为此,在设计无刷直流电机控制系统时,可结合其工作原理(见图5)加入数模混合的控制系统和数字化系统。因为无刷直流电机性能要求比较高,数模控制器芯片、数字电路以及DSP 的运算速读比较快,准确度比较高,能够完成复杂的算法。而无刷直流电机启动快的特性,能够使扇门保持最佳的运作状态,从而达到扇门快速启动的要求。此外,无刷直流电机优异的调速特性,能够使电源电压在负载时改变转速,使电源电压实现平滑调速,将其应用到扇门控制系统中,扇门能在电机的带动下完成启动、关闭动作,尤其是扇门在关闭过程中,如果有乘客刷卡,控制电路的电机会立马制动扇门迅速停止并迅速打开。可见,控制无刷直流电机的电路能使扇门启动、关闭速度更加稳定可靠[2]。

图5 无刷直流电机工作原理图
2.4.2 驱动电路
在扇门控制系统中,由于使用的电机属于货源紧缺型,成本价格比较高,为了避免后期出现断货现象,为此,需选择分立元件组成的驱动电路。这种驱动电路上侧是集电极开输出,能够驱动P 沟道MOSFET 管,其开关速读比较快,导通和关闭时间一般在39ns;下侧是推挽输出,具有100mA 电流驱动能力,能够驱动N 沟道MOSFET 管。可见,其驱动电流较小,过载能力比较强,开关频率比较高,耐压性能比较好,将其应用到扇门控制系统中完全可以推动无刷直流电机的驱动功能。
2.4.3 电磁铁控制电路
由于扇门的启动与关闭动作是需要机械连杆牵引,为此,在设计电磁铁控制电路时,可以选择吸盘式的电磁铁。该种电磁铁在通电后会产生极大的电磁吸力,能够有效控制扇门的往前、往后或停止动作,且动作灵活敏捷,比较稳定可靠,在设计时可根据电磁吸力与电压的要求选择相对应的电磁吸盘(见图6)。

图6 电磁铁控制电路图
3 总结
综上所述,地铁闸机扇门控制系统的设计是集多个学科为一体的系统工作,只有充分了解系统中各个程序、部件的工作原理与流程,才能设计出符合实际地铁闸机扇门,在不断的实践与研究中不断改进与提高地铁闸机扇门系统技术,以实现安全、可靠的全自动化控制系统,为人们今后的出行提供便利。
