下肢外骨骼康复机器人对偏瘫患者步态时空参数不对称性的影响
2021-09-06李新科吕晓龙建军马丁莹王玉龙叶晶
李新科,吕晓,龙建军,马丁莹,王玉龙,叶晶
脑卒中是一种高发疾病,患者急性期后常留有偏瘫后遗症。偏瘫患者由于患侧肌力下降、运动控制障碍和感觉功能障碍等,在步行时多表现为健侧和患侧不对称的异常步态模式。步态异常是影响患者正常生理功能及生活质量的重要因素[1]。近年来,下肢外骨骼康复机器人作为一种新兴的康复辅助治疗手段,越来越受到患者的青睐,但国内很少定性地分析其对偏瘫患者时空参数不对称性的影响。本文基于一款名为BEAR-H1的下肢外骨骼康复机器人,分析其对偏瘫患者时空参数不对称性的影响,报道如下。
1 资料与方法
1.1 一般资料 选取2018 年2 月至2020 年1 月宁波市第九医院收治的脑卒中患者10例,其中男5例,女5例;年龄45~65 岁,平均(56.3±4.2)岁;病程1~12 个月,平均(6.78±4.51)个月。
1.2 入选标准(1)符合脑卒中的诊断标准[2],经头颅CT或核磁共振检查确诊,初次发病,侧病灶;(2)在无体力和辅助器具帮助下能独立安全步行10 m以上;(3)患侧下肢Brunnstrom 分期Ⅳ~Ⅴ期;(4)发病前无平衡功能能障碍;(5)发病前为右利手;(6)患者自愿参加,并已签署知情同意书。
1.3 方法 采用英国Oxford 公司生产的VICON 光学运动捕捉系统测量患者步行时空参数。受试者下肢需要按照封三彩图5 所示贴上光学maker,每条腿贴11 个。受试者需要完成两部分的测试,首先受试者需穿戴自己舒适的衣服和鞋子,以自己舒适的步速在平地上连续行走10 m。然后休息10 min,再穿戴国内深圳迈步机器人公司研发的BEARH1 下肢外骨骼康复机器人在平地上以自己舒适的步速连续行走10 m。受试者在接受穿戴机器人测试前需保持安静5 min,并由专业测试人员详细告知每位受试者测试整个过程、测试要求及注意事项,同时告知受试者本实验无任何伤害,无需紧张,以免影响测试结果的可靠性。
1.4 评定标准 选用受试者穿下肢外骨骼康复机器人和不穿下肢外骨骼康复机器人的健患侧不对称性作为评价指标。健患侧不对称性可以通过患者步行过程中双侧下肢各步态时空与距离参数计算得知,其中时间-空间参数包括支撑相占比、摆动相占比,距离参数包括步长、步速、跨步长等。不对称比的计算公式[3]:不对称比=P 患侧/P 健侧(其中P 代表各步态时空参数)。计算不对称比值时,为了便于临床分析,规定数值较小的一侧作为分子;因此,各时空步态不对称比得出的绝对值均≤1。当比值=1 时,即产生最完美的对称,比值<1 即存在不对称性,比值越小提示不对称的程度越大。
1.5 统计方法 采用SPSS17.0软件进行分析,计量资料用均数±标准差表示,采用检验。<0.05 为差异有统计学意义。
2 结果
与不穿下肢外骨骼康复机器人时相比,穿戴外骨骼机器人后患侧跨步长显著增加,支撑相占比显著缩短,摆动相占比显著延长(均<0.05),见表1。两组左右步长对称度、摆动相时间对称度差异有统计学意义(均<0.05),见表2。
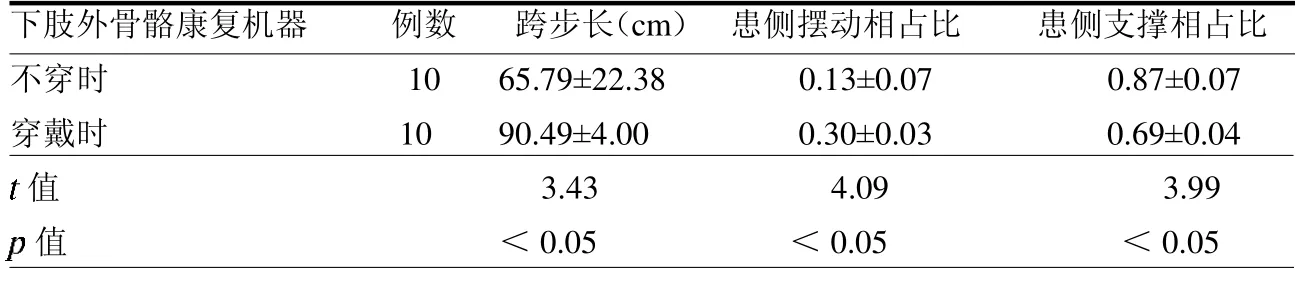
表1 穿戴外骨骼康复机器人前后跨步长、患侧摆动相占比、患侧支撑相占比比较

表2 穿戴外骨骼康复机器人前后摆动相时间不对称比、左右步长不对称比比较
3 讨论
本文选择步长、支撑相时间、摆动相时间等时空步态参数评估下肢外骨骼康复机器人对纠正偏瘫患者时空步态参数不对称性的影响。结果显示:与不穿下肢康复机器人训练相比,穿戴外骨骼机器人后偏瘫患者患侧跨步长显著增加,支撑相占比显著缩短,摆动相占比显著延长(均<0.05);两组左右步长对称度、摆动相时间对称度差异均有统计学意义(均<0.05)。
下肢外骨骼康复机器人给患侧一定助力,降低患侧下肢肌张力,纠正其足下垂等现象,所以步行时步宽明显变小,步速明显提高[4]。偏瘫患者步长变短与患肢摆动相对地面的推进力差有关,穿戴机器人后给予一定助力,则可显著增加步长[5]。偏瘫患者因为踝关节背屈力弱,足跟落地后肌肉收缩不充分,导致支撑相的延长,通过机器人提供助力,可以显著减少支撑相时间[6]。
