基于迭代学习的三自由度机械臂轨迹跟踪控制
2021-09-06宋英杰唐武生周露露
王 刚 宋英杰 唐武生 赵 强 周露露
(1.白城师范学院 机械与控制工程学院,吉林 白城 137000;2.长春大学 机械与车辆工程学院,长春 130022)
0 引 言
机械臂是集机械、控制、通信和计算机等多学科技术为一体的自动化设备[1],其控制精度的提高能保证加工产品的合格率以及操作人员的安全性。李岩等[2]针对二自由度机械臂非线性系统,采用加速PD(Proportion Differentiation)型迭代学习控制算法实时修改增益矩阵,缩短修正区间,加快收敛速度,仿真结果显示在学习速度方面,PD 型迭代学习控制算法优于P(Proportion)型迭代学习控制算法。万凯歌[3]采用基于误差信号的比例-积分-微分项构建滑模面,设计滑模控制器跟踪控制机械臂末端轨迹,降低控制力矩抖震对机械臂系统的影响。魏娟[4]利用最近邻聚类算法更新模糊规则库优化神经网络隐层神经元的数目,用模糊控制自适应调整神经网络的参数及结构,改进的神经网络控制器减小了系统的超调量和机械臂轨迹跟踪的角度波动范围。郑壕楠[5]以二自由度机械臂为模型进行基于加速抑制初态误差迭代学习的二自由度机械臂轨迹跟踪控制仿真,在初态偏差存在的情况下,第10 次迭代学习后实现系统的实际输出能基本完成期望输出的跟踪。赵娟等[6]以双连杆机械臂为模型,采用多策略协同进化粒子群算法,以驱动力矩和轨迹跟踪误差最小作为控制目标,设计智能自适应模糊控制器,与传统PID(Proportion Integration Differentiation)相比,跟踪误差幅值降低74%,驱动力矩的平均振动幅值降低83%,实现降低力矩的同时减小跟踪误差,提高了控制精度。李克讷等[7]从导轨机械臂的关节速度约束出发,设计基于伪逆算法的关节纠偏运动规划,解决末端执行器轨迹跟踪时关节速度偏离期望值的问题。吴爱国等[8]针对多自由度机械臂轨迹跟踪时跟踪精度低的问题,提出一种结合自适应神经网络、极局部模型与积分型终端滑模的控制方法,实验验证了在完全不依赖模型信息的前提下实现机械臂的高速度和高精度跟踪控制。王伟等[9]结合传统的快速终端滑模和非奇异终端滑模,设计了一种基于快速非奇异终端滑模的控制方法,使机械臂按预定轨迹运动,有效抑制滑模控制器的固有抖振现象。笔者针对存在外部干扰的三自由度机械臂模型采用变增益迭代学习控制器进行仿真,以实现更为精确的各关节末端轨迹跟踪。
1 三自由度机械臂的动力学模型
三自由度机械臂模型结构设计为在水平面上运动的系统,通过控制电机输出力矩驱动各个关节机械臂完成各自所需的角位移量,协同实现末端轨迹的控制[10]。
三自由度机械臂模型结构如图1 所示,3 个关节具有分布质量,在计算动能时需要考虑转动惯量。系统的总动能为关节1、关节2 和关节3的动能总和,求出各关节质点和质心在坐标系XOY的坐标,通过对时间求导,求出各关节质点和质心的速度,分别计算各关节平动动能和转动动能,作和可得出机械臂总动能K。
对关节1的质心位置求导得其速度
2 迭代学习控制器的设计
PID 型迭代学习控制律通过修正改善控制输入量,随着迭代次数的增加,输出期望值与实际值的差值不断减小,用于高精度跟踪设定期望轨迹。对三自由度机械臂的动力学方程(13),机械臂的轨迹跟踪始终保持动态,不存在稳态误差,稳态误差不会对机械臂的轨迹跟踪系统产生影响,不必引入积分环节。常规的PD 型迭代学习算法收敛速度较慢,闭环PD 型迭代利用当次误差进行学习,本质上提高了学习速度,在闭环PD 型的基础上加入变增益,降低了迭代次数。因此,笔者采用变增益闭环PD 型迭代学习控制律[14]


通过上述证明,对满足假设1~假设4 和定理1的非线性系统(18),在有界干扰存在情况下,随着迭代学习增加,系统收敛在有界范围内,趋近于TMcbφ/(1-ρ)。
3 仿真实验
以图1 所示的平面三自由度机械臂为例进行仿真,将控制律应用其中。机械臂的具体参数如表1所示。

表1 三自由度机械臂仿真参数Tab.1 Simulation parameters of 3-DOF manipulator
设期望轨迹分别为θ1d=sin(3t)、θ2d=sin(3t)+sin(2t)、θ3d=sin(3t)+sin(t),系统的初始状态为xk(0)=[0 0 1 3 8 3]T,干扰项τd=[0.7sint0.6cost0.8sint]T,其中

建立三自由度机械臂迭代学习控制系统Simulink 仿真模型[17]如图2 所示。其中Mechanical_arm_ctrl为控制器子程序,Mechanical_arm_plant 为运算实际轨迹子程序,Mechanical_arm_input 为设置期望轨迹子程序。

图2 三自由度机械臂控制系统仿真图Fig.2 Simulation diagram of 3-DOF manipulator control system
随着迭代次数的增加,三关节的跟踪轨迹收敛于期望轨迹,误差逐渐趋于0,图3~图5 分别为闭环变增益关节1、关节2、关节3的第6 次迭代跟踪轨迹图,图6 和图7 分别为闭环定常PD 型迭代学习控制和闭环变增益PD 型迭代学习控制的关节1、2、3的20 次迭代跟踪误差收敛图。仿真结果显示,三自由度机械臂基于闭环定常PD 型迭代学习的控制器和闭环变增益PD 型迭代学习的控制器分别在第8 次和第6 次迭代学习后基本实现期望轨迹的跟踪。结果表明,与闭环定常PD 型迭代学习控制律相比,闭环变增益迭代学习控制律加快了学习的速度。

图3 关节1的第6 次迭代 跟踪轨迹图Fig.3 Tracking diagram of the 6th iteration of joint 1

图4 关节2的第6 次迭代 跟踪轨迹图Fig.4 Tracking diagram of the 6th iteration of joint 2

图5 关节3的第6 次迭代 跟踪轨迹图Fig.5 Tracking diagram of the 6th iteration of joint 3

图6 闭环定常PD 型迭代学习控制的关节 1、2、3的20 次迭代跟踪误差收敛图Fig.6 Convergence of tracking error for 20 iterations of joints 1,2 and 3 based on closed-loop fixed constant PD iterative learning control
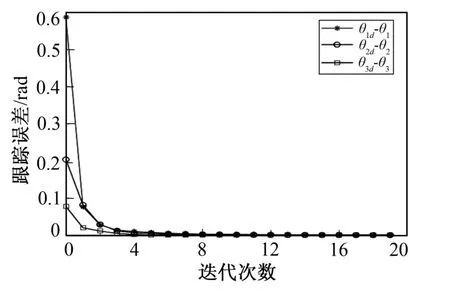
图7 闭环变增益PD 型迭代学习控制的关节 1、2、3的20 次迭代跟踪误差收敛图Fig.7 Convergence of tracking error for 20 iterations of joints 1,2 and 3 based on closed-loop variable gain PD iterative learning control
4 结 语
笔者通过分析平面三自由度机械臂动力学模型,设计变增益迭代学习控制器并进行收敛性分析,利用Matlab的Simulink 仿真模块,实现三自由度机械臂各关节末端的轨迹跟踪。仿真结果表明,变增益迭代学习控制器实现加速收敛、消除系统中干扰对轨迹跟踪控制影响的效果。笔者仅针对确定量的三自由度机械臂的轨迹跟踪问题,利用变增益迭代学习控制律增加学习的收敛速度,后续可利用最优控制理论对增益参数进行在线辨识优化以及对不确定量的机械臂模型作进一步研究。