基于图像识别技术的翻斗式矿车结底智能清理装置研究
2021-09-02吴富姬欧阳健强杨文龙
郭 毅,吴富姬,钟 毅,欧阳健强,杨文龙
(1.赣州有色冶金研究所有限公司,江西 赣州 341000;2.赣州有色冶金研究所有色金属矿冶装备工业设计中心,江西 赣州 341000)
0 引 言
钨作为一种稀有金属,其用途极其广泛,钨大量应用在航天、汽车、船舶、火箭、导弹等多个领域,是一种应用价值极高的稀有金属[1-2]。因此开采钨矿并将其提炼具有重要意义,在钨开采到提炼过程中,把钨矿石从矿床运输到车间是关键一环,直接影响到钨矿的开采效率,高效钨矿运输装备是高效开采钨矿的前提。目前在钨矿石运输装备中,旋转翻斗式矿车是矿山采掘工业中轨道运输的主要设备,该装备能够根据需求向左或者向右进行侧翻,使用较为灵活多变[3-6],很多矿山基本都是采用该类型翻斗式矿车用于矿石运输。但在矿石运输及倒矿过程中,普遍存在着湿黏性物料黏结结底的问题。结底厚度根据矿石性质不同,可使导致矿车的有效容积减少10%~15%,有的甚至减少30%~60%。中小型矿山针对翻斗式矿车结底问题普遍采用人工清理的方式,倒矿工人使用铁锤不断敲打车底,通过敲打振动使得结底脱落,或者采用人工水冲洗的方式清理结底;人工清理结底方式存在工人劳动强度大、噪音大、矿车车底形变大、清理不完全、清理时间长等问题,人工清理方式已经跟不上矿山的发展。矿车结底问题极大地降低了矿车利用率及矿车运输能力,严重影响了矿井生产水平的发挥。由于矿石提升运输基本采用的是电机等用电设备,也浪费了大量的电能。针对人工清理结底缺陷,国内有部分企业采用电振动、化学清理等手段对矿石结底进行清理,但均存在缺陷,化学清理容易腐蚀矿车,电振动清理容易使矿车发生形变。国外相对国内清理手段更为先进,大部分采用可编程逻辑控制器(PLC)控制技术控制高压水枪或气阀对矿车结底进行清理,但依旧不够智能,人为操作也具有一定局限性[7-8]。
本研究介绍一种基于图像识别技术[9-10]的新型矿石结底智能清理装置,贯彻工业智能化理念,用智能机器取代人工,实现矿石结底清理的功能,以期降低矿山企业开采钨矿的生产成本,提升钨矿石运输的效率。
1 矿石结底智能清理装置介绍
该智能清理装置主要由图像采集及分析系统、视觉导引驱动装置、多维度结底清理装备三大块构成。
图像采集及分析系统是在倒矿点矿车侧翻方向安装深度相机,深度相机通过开发的软件系统与计算机相连,形成图像信息采集系统。深度相机采集矿车位置和结底的图像信息,利用软件系统获得矿车内结底矿石表面深度信息和表面RGB 图像信息,根据采集的图像信息,提取当前矿车位置信息和结底矿石厚度信息。
视觉导引驱动装置是根据图像采集矿车轮廓信息,先采用手眼视觉定位技术精确定位矿车位置,再通过伺服或步进电机驱动高压结底清洗装置至特定位置。
多维度结底清理装备是在中心点位置,根据采集的图像深度信息判断结底量信息、结底冲洗时间与清洗压力,采用多维度旋转和摆动的机械结构,通过设定的旋转角度,实现单车或多车联动结底智能无死角清理功能。
2 矿石结底智能清理装置的工作流程
在选厂倒矿点倒矿机倾倒矿车后,通过现场安装的工业深度相机对矿车底部进行图像分析处理,计算出相应的矿车结底厚度以及识别矿车位置信息,然后将信息反馈至控制器,通过视觉导引,伺服或步进电机驱动高压结底清洗装置至指定位置,采用高压水射流技术的结底清洗机构,根据控制器逻辑判断得出的动作指令,自动选择区域、压力、冲洗时间等参数,对矿车进行高压结底冲洗,实现矿车结底的清理功能,如图1 所示。
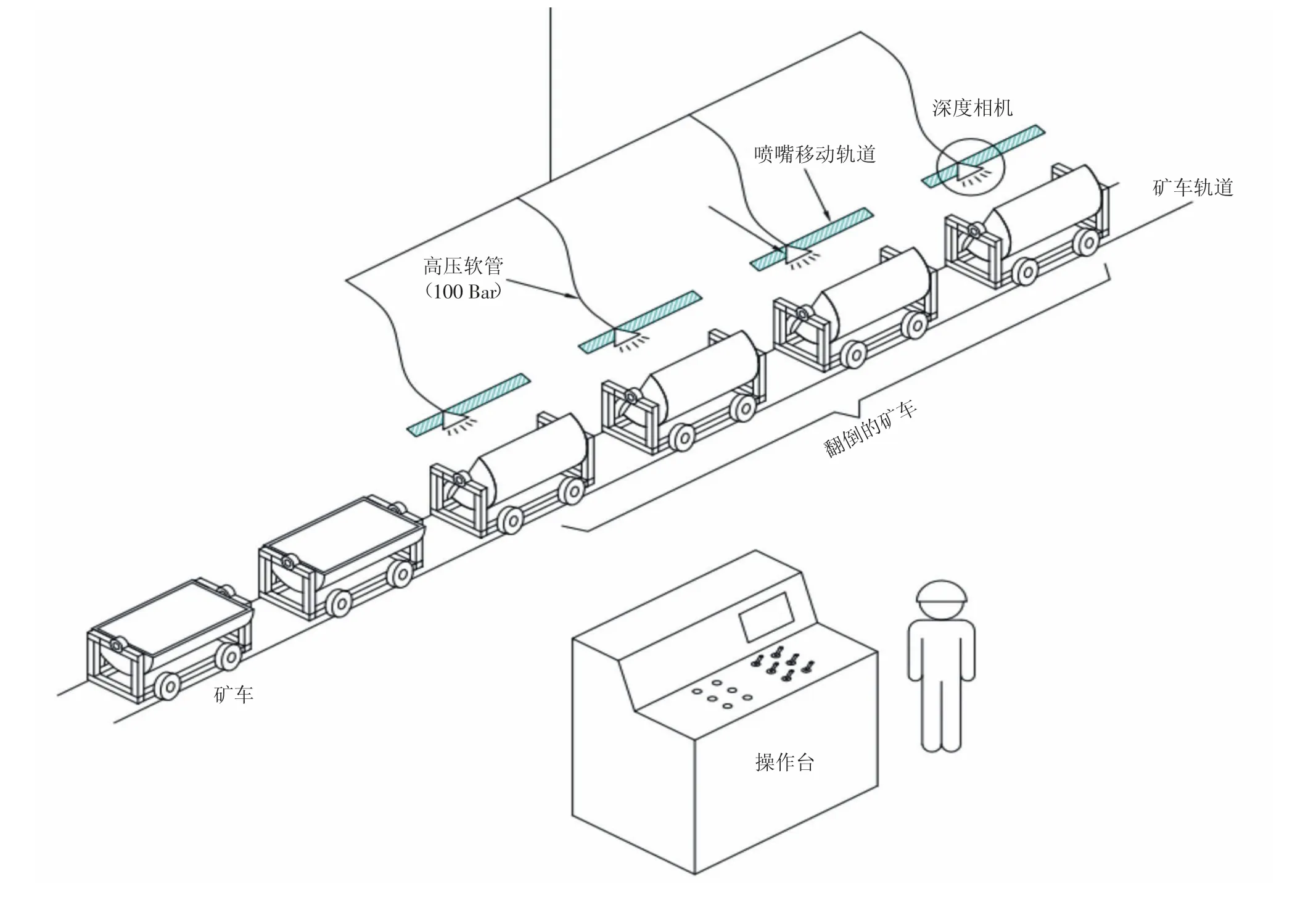
图1 矿石结底智能清理装置的工作流程示意图Fig.1 Schematic diagram of the working process of the intelligent cleaning device for ore bottoming
3 矿石结底清理装置的设计与实现
3.1 图像采集及分析系统
图像采集及分析系统主要是由工业深度相机和相应的软件系统构成。工业深度相机可以拍摄两种类型的图片,一种是RGB 彩图,另一种是根据物体与相机的距离拍摄的深度图像。深度图像是根据工业深度相机上的红外发射器发射红外线到物体,再传到红外接收器形成的深度图像,且工业深度相机拍摄的频率较高,一秒内可至少拍摄10 张图片。工业深度相机的作用不单是通过RGB 彩图获取当前矿石位置信息;还可通过深度图像得到结底矿石的厚度信息,信息反馈至软件系统,从而调整执行机构的相关参数。
系统分析需要采用相关边缘检测算法[11-12]通过图像轮廓检测出来。本研究采用Canny 算子边缘检测算法,通过Canny 算子边缘检测算法将矿车轮廓识别后,需进行坐标变换,确定矿车轮廓的位置。
Canny 算子边缘检测是一种非常优越的算法,该算法的特点是不会受外界噪声的影响,对于弱边缘检测有着极大的优势,相比Sobel、Prewitt 算子边缘检测则显得抗干扰性差,不容易检测到弱边缘。Canny 算子的原理是给强边缘与弱边缘设定相异的阈值来进行检测,只有两种边缘能够连通时,才把弱边缘作为图像的一部分显现出来。
Canny 算子边缘检测流程:(1)首先对图像去噪,使用高斯滤波对图像去噪,对其平滑处理。(2)针对像素进行计算,得到所有像素点的梯度大小及方向。(3)为了去除边缘检测中带入的其他响应,采用非极大值(Non-Maximum Suppression)进行抑制;(4)采用不同的阈值对图像的边缘检测,以此得到实际的和潜在的边缘;(5)最后把弱边缘进行抑制,完成轮廓检测。
以上步骤中,所述的非极大值抑制其实是对边缘进行稀疏化。由于通过梯度值得到的边缘依旧不够清楚,但是通过非极大值抑制的方法能够使得除了局部最大里面的梯度值,其他所有的梯度值都抑制至零,这样余下的像素能够更接近图像的实际边缘。对于因为噪声以及颜色变化而导致的一些边缘像素,可以通过弱梯度值对这些边缘像素进行过滤,对于高梯度值则进行保留的方法来处理。具体为通过两种不同阈值来实现,一种设定为高阈值,一种设定为低阈值,如果边缘像素高于高阈值,则认定为强边缘像素,同理,梯度值低于高阈值而大于低阈值,则认定为弱边缘像素,至于小于低阈值,则将其抑制。
边缘像素划分后,由于强边缘是真实边缘,其真实性无可争议。但是,对于弱边缘像素,由于该像素有可能是因为噪声或者颜色变化而形成的,所以弱边缘像素具有不确定性。为了结果更为真实,则对后者引起的边缘进行抑制。一般情况下,真实边缘造成的弱边缘像素会连接到强边缘像素,而一般由噪声相应引起的则不会连接,为了验证其真实情况,可以查看弱边缘像素周围8 个领域像素,如果其中出现了一个强边缘像素,则认定该弱边缘为真实边缘。
本研究相机选择的工业深度相机,其测量高度是0.4~5 m 之间,拍摄的分辨率为4 k,能够清晰地观察到图片内容,真实地还原场景信息,拍摄的速度为25 帧/s,不存在漏拍现象,完全符合实时拍摄的条件。
3.2 视觉导引驱动装置
视觉导引驱动装置主要是根据工业深度相机采集到的矿车轮廓信息,再通过手眼视觉定位技术精确定位矿车位置,再通过矿石结底厚度计算方法得到矿石结底的厚度信息,最后根据矿石结底厚度信息依靠伺服或步进电机作为动力驱动高压结底清洗装置至特定位置。
3.2.1 手眼视觉定位系统
手眼视觉定位系统是对识别出的矿车进行坐标变换,是要通过图像采集卡将图像转换为数字图像传输给计算机,计算机通过图像处理相关手段建立图像坐标系,再通过图像坐标与空间坐标的对应关系确定矿车所在的位置。手眼视觉系统最关键的一步为系统标定,因为系统标定决定了系统定位的精度,手眼标定步骤如下。
(1)获得执行机构当前位姿(位置及姿态)。(2)通过当前执行机构目前的状态以及下一步设定的运动路径,来得到执行机构下个状态。(3)获取执行机构的每一个位姿下的标定板数据。(4)根据执行机构的位姿以及标定板数据获得相机与执行机构的手眼标定结果。
3.2.2 矿石结底厚度计算
为了实现整个清理装置的闭环控制[13-14],需要依据计算矿石结底的厚度以及所识别出的矿车轮廓,将其作为整个闭环控制的输入,控制器采用PLC控制台来实现执行机构(高压水枪)的控制[15-18],通过控制高压水枪的冲洗力度以及冲洗角度,来实现对矿车结底的清理。此过程计算矿石结底厚度信息尤为重要,只有对矿车结底信息的准确识别,才能够把控高压水枪的冲洗力度,从而能够达到高效冲洗、节省能源的目的。
本研究采用深度相机作为测量矿石结底厚度的装置,通过深度相机获取的深度信息是指相机至矿石结底表面的距离,由于矿车结底面为曲面,水枪至矿车结底面的距离不统一,采用深度相机上激光测得的距离(L)是经过高斯去噪后再均值化处理所得到。由于每个翻斗式矿斗都是标准化的,并且每次矿车的清洗位置都在同个位置进行清理结底,因此相机至矿斗底部的距离(H)都是固定的(可通过直接测量得到),因此矿斗结底的厚度可直接用相机至矿斗底部的距离减去相机至矿石结底表面的距离,即:N=H-L。
然后选取伺服电机驱动器,由于该清理装置需要较大的功率的电机,本研究选取额定功率为3 800 W的交流伺服电机,其功率可满足机器需要,可360°转动。
3.3 多维度结底清理装备
多维度结底清理装备是能够实现多维度旋转和摆动的一种机械装置,其主要工作原理是根据工业深度相机采集的图像深度信息来获取结底量信息,再根据图像深度信息计算执行机构(多维度结底清理装备)需要的冲洗时间以及冲洗的水压大小,采用多维度旋转和摆动的机械结构,通过设定的旋转角度,实现单车或多车联动结底智能无死角清理功能。根据该装置的实际需求,设计了其外观图,如图2 所示。

图2 外观图Fig.2 Outside view
本研究设计的高压喷水装置是在矿车清洗过程中通过调节高压喷头的上下左右动作,完成各种预定的运行轨迹,从而达到对矿车的清洗。
4 结 语
研究针对钨矿运输装备矿山翻斗式矿车在井下运输及倒矿过程中存在湿黏性物料黏结结底情况且需要及时清理的问题,研制一套基于图像识别技术的翻斗式矿车结底智能清理装置。根据某钨矿山翻斗式矿车倒矿作业实际情况、作业要求以及矿石性质,通过现场安装的多个深度相机,采用图像识别技术智能判断每个矿车位置及结底情况,进行视觉导引技术精确定位;结合矿车底部结构、倒矿动作、矿车的翻转角度等,确定执行机构相关参数,最后采用高压喷水装置对矿车底部进行冲洗,实现了矿车结底的清理功能。
