车辆稳定性技术的研究*
2021-09-01杜军琼李军
杜军琼 李军
(重庆交通大学机电与车辆工程学院)
近年来由于安全事故的频发,导致人们对车辆安全性担忧,其中车辆稳定性技术对安全性的提升尤为重要。根据2020年1-10月的国内安全事故统计,其中交通事故在总的安全事故中是占比最大的,最高的数据时能到总的安全事故的一半,由此可见车辆的安全性是最需要关注的。由此可证明,车辆侧滑失稳是必须要关注的问题[1]。综上所述,车辆稳定控制研究很有意义。所以,文章对车辆稳定影响较大的几个因素:滑移率、车辆侧倾和质心侧偏角以及横摆角速度展开了研究。
1 车辆稳定性的概念
当汽车行驶车速过快或在紧急情况下驾驶员操作汽车进行避让时,快速转动方向盘会导致汽车发生侧滑甚至侧翻。车速过快时,不易被驾驶员控制,容易发生侧滑、甩尾和侧翻等事故,这就会导致车辆侧向失稳。因此,汽车在稳定方向的控制研究应运而生,称作车辆稳定控制系统。
车辆稳定控制系统是通过缩小实际值与期望值的差值来尽量使车辆保持稳定,具体来说就是当驾驶员的操作与车辆的实际运行状态存在偏差时,缩小偏差,比如在一些道路条件差,弯道半径小的区域行驶,车辆行驶时的真实状态与驾驶员所想的期望状态有偏差,可能会出现转弯过度或者转弯不足的现象,这时车辆控制系统就会对车辆运行状态进行纠正,使汽车达到理性运行状态;再者就是将失稳状态下的汽车回归到正常运行状态来。比如在驾驶员意识不清,操作不准确的情况下,汽车出现异常情况,如甩尾、侧滑以及左右摆动等,车辆稳定系统会更正,引导到正常行驶状态。简单来说,车辆稳定控制系统是1种主动安全控制系统,对汽车出现的不稳定状况进行及时修正。
2 车辆稳定系统控制目标
目前对车辆稳定控制的研究主要集中在算法研究方面,其中按控制目标的不同可大致分为3类:以滑动率、以横摆角速度和质心侧偏角以及侧倾运动为控制目标。
2.1 滑动率作为参考目标
滑动率定义:

式中:Si——滑动率,%;
ui——表示车轮质心速度,km/h;
r——没有地面制动力时的车轮滚动半径,m;
ww——表示车轮角速度,rad/min。
S=0,车轮纯滚动;0 滑动率与附着系数关系如图1所示,其中:φb为制动力系数,φp为峰值附着系数,φs为滑动附着系数,φl为侧向力系数。如图1所示,侧向力系数随着滑动率的增大而减小,制动力系数随着滑动率的增大而增大,当增大到一定值时,随着滑动率的增大而减小,由此可见,要使得滑动率达到最优,侧向力系数必然减小,力求使2个值达到相对最优是研究者期望达到的目标。 图1 滑动率与附着系数关系图 文献[3]考虑到车辆在驱动和制动过程中,轮胎的变参数和路面的摩擦对车辆速度的精确值的影响,通过轮胎模型和纵向动力学模型的结合,建立了非线性系统状态方程,使用卡尔曼滤波算法对车辆纵向速度估计,得到估计值,再进一步解出车轮的滑移率。文献[4]在电动制动系统使用模糊神经网络系统对传统PID控制系统改进,控制滑移率在安全范围内。文献[5]基于离散滑模变结构理论,设计包含强鲁棒性特点的车轮滑移率离散积分滑膜控制器,使用延迟估计方法和补偿系统不确定性,对抖振进行抑制,在Elman神经网络下,利用其时间序列的预测功能建立车轮目标滑移率预测模型,估计下一时刻的目标滑移率,在粒子群优化算法的作用下对模型的滑移率修正,提高控制精度。文献[6]基于滑移率的滑模控制率对滑移率控制,基于轮减速度控制的滑模控制率控制轮减速度,利用2者的优势互补实现电动汽车在制动过程中对制动能量的稳定回收。文献[7]基于轮胎模型实现对车轮滑移率的确定,利用滑模控制算法,将实际上滑膜率与目标滑膜率之间的偏差减小,对车辆实现稳定控制。 以滑移率为控制目标实现车辆的稳定性是具体到对车轮的控制,对制动力和驱动力进行分配,使车辆的滑移在安全范围内。目的是防止车辆侧滑,使车辆稳定行驶。 横摆角速度是以车辆坐标系中以z轴为旋转轴,表示汽车在制动和转弯过程中的车辆状态,综合确定横摆角速度的方法有: 1)通过横摆角速度感应器直接测得; 2)通过多种感应器的融合来确定。 因横摆角速度感应器的成本较高,在大多数的中低档车上还未得到普及,所以大多数的研究者是基于多种传感器融合间接得到横摆角速度,基于多种传感器融合实现对横摆角速度值的估计,具体需要在运动学模型和动力学模型得到横摆角速度的估计值,运动学模型下对横摆角速度值的估计是在多个传感器在得到感知信号后,综合各传感器的得到的信号值,算出横摆角速度的估计值;在动力学模型下主要通过整车模型和轮胎模型的以及对参数的准确性要求高,当估计模型不准确和参数不易获得时,所要求出的车辆横摆角速度值难度就会加大[8]。横摆角速度值估计方法对比如表1所示。 表1 横摆角速度值估计方法对比 质心侧偏角定义为汽车行驶速度方向与车辆纵轴之间的夹角,数值表示为 式中:α——质心侧偏角,(°); vy——横向车速,km/h; vx——纵向车速,km/h。 由公式可知是横向车速与纵向车速的反余切值。对质心侧偏角的估计主要有: 1)通过观测器直接测得; 2)动力学估计方法; 3)运动学估计方法。观测器测质心侧偏角同横摆角速度类似,具有较高成本,不易普及。 运动学估计方法是对横向加速度和横摆角速度等传感器信号进行积分得到质心侧偏角[9],动力学模型的核心在于车辆纵向力的测得,具体是对轮胎上的制动力和驱动力的估计,对纵向力的估计方法有2类,一类是半经验轮胎模型的纵向力估计。文献[10]对轮胎非稳态模型的领域,根据物理模型建立了胎面的阻尼器模型和建立等效为弹簧和阻尼器的胎体模型,根据轮胎胎体力与力矩的平衡,建立轮胎非稳态模型。另一类是基于车轮动力学模型的纵向力估计,文献[11]在车轮动力学模型的基础上,根据制动力和制动踏板角度等估算出纵向力。 文献[12]基于模型控制算法上车辆主动转向和轮胎力分配进行集成控制,采用带约束的预测控制模型,通过二次规划方法后求解后轮转角和附加前轮转角,在保证横摆角速度的前提下,减小汽车的侧偏现象,提高稳定性。文献[13]以质心侧偏角和横摆角速度为控制目标,采用观测器对车辆状态进行观察,基于变结构理论构建以滑膜控制算法设计控制器实现对质心侧偏角的估计,对车辆是否偏离行驶轨迹进行判断,实现对车辆的控制,该方法实现了参考值和实际控制量的分离,将参考值通过上层控制器来确定,下层控制器实现对力矩的分配控制,简化了系统的操作的流程,便于系统的控制。文献[14]在二自由度模型下计算出理想的横摆角速度和质心侧偏角,通过转向控制器将实际值与理想值的偏差作为输入,对车辆状态调节。 在车辆稳定控制中,把横摆角速度和质心侧偏角作为控制目标是最先被使用到车辆稳定性研究中,也是目前发展的较为成熟的控制方式,目的是防止汽车在行驶过程中偏离行驶轨迹和对车辆转向不足或者转向过度调节,保证车辆行驶稳定。 国内外对车辆静态侧倾的参考值主要有静态稳定因子,表达式为,表示为车辆半轮距T与质心高度H的比值,但该公式是将车辆视为一个刚体,对车辆在运动中的状态参考意义不大;侧拉比例系数值是将车辆放在一个侧倾平台上,在车的一侧施加力拉动汽车侧倾,当另一侧轮胎刚刚离开地面时即为系数值,表达式为,侧行拉力(F)与汽车质量(W)的比值,可用于估算出汽车在临界状态下的横向加速度;侧倾比例系数TTR=tanφ,φ为车辆侧倾稳定角度,将车辆放在侧倾试验台,当一侧的轮胎即将离地时,试验台的侧倾角即为车辆最大侧倾稳定角[15]。 综合多个文献了解到侧倾运动的主要参考量车身侧倾角,横向加速度以及横向载荷转移引起的车身侧倾。 文献[16]建立8自由度的整车模型,以侧倾系数为参考值,在超过设置的系数值时,控制侧向加速度实现对车辆侧倾的稳定控制。文献[17]以侧倾刚度确定侧倾角的大小,当侧倾刚度超出预定预设值时,通过调整该车型弹簧刚度和横向稳定杆的直径使侧倾刚度回到预想值。 文献[18]为了实现在复杂工况下对车辆耦合的侧倾运动状态能够得到及时的准确估计,设计了以车辆垂向和横向耦合动力学作为基础的双非线性状态观测器算法,能够在多种路面的激励下实现车辆系统簧载质量和侧倾状态的联合估计,并在联合状态观测器的作用下对车辆状态和侧倾率的观测精度得到实时值。文献[19]在PID控制中,采用改进粒子群算法对侧倾力矩控制,对控制器的参数进行调节和优化,提高车辆侧倾稳定性。 以侧倾运动作为控制参考目标,在给定侧翻阈值内,允许车辆有相应的侧倾运动。这种控制方式主要是为了防止车辆产生过大的侧倾角,使车辆产生危险动作。 综上所述,车辆稳定性技术在汽车安全方面发挥着至关重要的作用,需要不断从各个方向对车辆稳定性进行总结,方便之后的研究。 1)国内对车辆稳定系统理论与技术研究还处在发展期,与国外还有很大差距。 2)车辆稳定控制不仅要对传统方法熟知,算法与传统方法的融合更是研究大势。 3)针对多个变量的耦合可试着采用多模型建立,分别对变量分析,最后使用加权函数对整体分析。 4)分析变量既要考虑到对车辆的直接影响,还要考虑其他变量的耦合作用。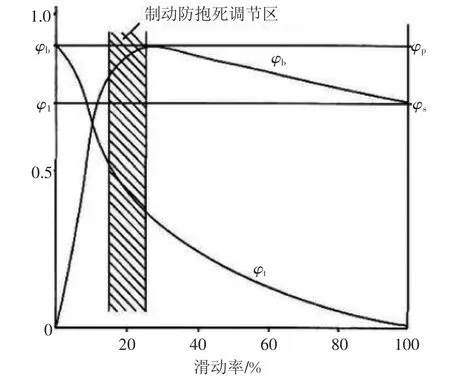
2.2 横摆角速度和质心侧偏角为参考目标


2.3 侧倾运动为参考目标
3 结论
