基于相位条纹的城乡一体化地籍高精度测绘方法
2021-08-31白洁
白 洁
(阳城县自然资源局,山西 阳城 048100)
0.引言
相位条纹是雷达技术中的一项概念,在实际应用过程中,以同一信号作为测量对象,在反射作用下,测量接收机接收信号产生的时延。地籍测量是一种土地管理工作工具,以现有的地籍调查数据作为依据,不断精确土地位置以及权属界址,用于支持土地管理部门的需要。在现代化测量仪器的支持下,如何增强测绘数据的精度成为当下研究的需求[1],为此,利用相位条纹采集城乡一体化区域的边界数据信号,设计城乡一体化地籍高精度测绘方法。
国外在研究地籍测绘方面起步较早,最初以红外激光器作为主要测量仪器,结合光线结构,挖掘计算了多种测绘信息数据,并设定了多种测绘计算方法。国内在研究地籍测绘方面起步较晚,结合获取的序列,直接获取土地的信息数据,优化处理了多种测绘过程。从文献[2]中的测绘方法来看,引用了特殊的投影系统,构建了测绘物体间的比例关系,完成了测绘过程[2]。从文献[3]中的测绘方法来看,构建了图像融合与差值预测的一种条纹投影方式,在自适应算法的支持下,完整提取了测绘对象的完整信息[3]。但两文献中的测绘方法在获取绝对相位时,产生了一定的误差,导致实际获取的观测数据点数量过少,测绘方法实际的定位效果较差。由此可知:设计基于相位条纹的城乡一体化地籍高精度测绘方法是很有必要的。
1.基于相位条纹的城乡一体化地籍高精度测绘方法
1.1 变换城乡一体化地籍相位轮廓
以现有城乡一体化地籍数据作为处理基础,在变换地籍相位轮廓时,固定参考光栅的位置后,转化调制条纹空间后,采用傅里叶变换轮廓术处理条纹空间为一个复数分布,假设地籍投影的条纹频率,转化形成的调制条纹空间可表示如式(1)所示:

式(1)中,Ζ(x,y)为像素坐标;f为条纹频率;x0为原始像素数值;I(x,y)为光强参数。分解转化调制得到的条纹空间后,计算条纹中的相位分量,数值关系可表示如式(2)所示:

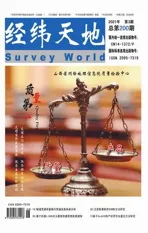
式(2)中,B(x,y)为分解后的调制条纹空间;c(y)为条纹的基频分量。引用正切函数计算相位中的包裹分量后,得到地籍变换形貌的频谱(如图1所示):
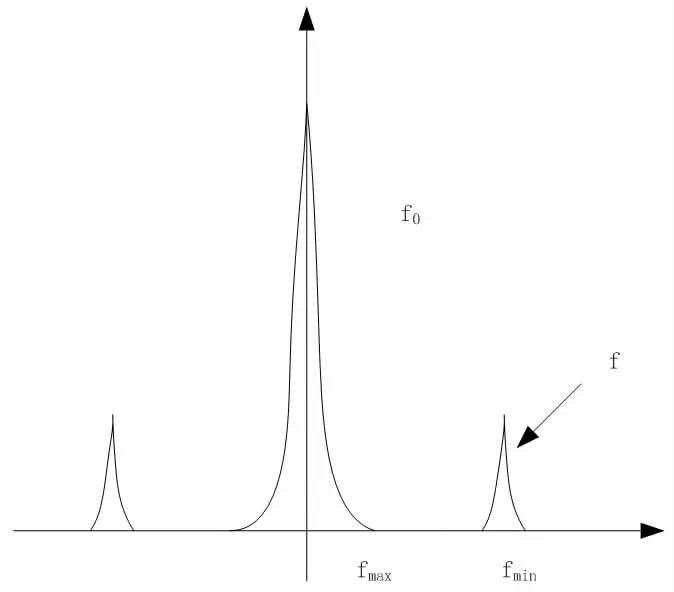
图1 地籍变换形貌的频谱
在图1所示的地貌频谱结构内,对应不同的频率极大数值,在地籍变换的形貌与对应的相位之间,建立一个映射数值关系,可表示如式(3)所示:

式(3)中,∂(x,y)为包裹相位;s为地籍范围面积;e为变换参数。对应计算得到的相位轮廓参数,采用相移算法不断叠加求解的地籍形貌,在实际变换过程中,采用重复抽样的方法[4],消除地籍形貌函数中的零频产生的混叠。为控制条纹不连续对获取的相位轮廓产生的影响,引入一个差分算子,包裹相位轮廓的梯度数值,变换城乡一体化地籍相位轮廓后,控制地籍内路径包裹相位精度。
1.2 控制地籍路径包裹相位精度
以上述得到的包裹相位参数作为精度控制对象,展开处理包裹相位后,积分处理包裹相位,并设置一个积分路径如式(4)所示:

式(4)中,F(q)为包裹相位函数;r为路径长度。对应积分路径内的积分点,建立一个平面范围内的枝切线,构建一个线性的枝切线函数关系,以函数内的极值作为初始残差点,建立一个相位展开过程,数值关系如式(5)所示:

式(5)中,γ(x,y)为初始残差点;k展开参数。联立上述计算公式(4)与(5)后,求解不同展开状态下的展开函数,在展开函数中联立一个加权函数,并根据联立后的函数关系,创建一个约束条件如式(6)所示:

式(6)中,ρ(x,y)为引入的加权函数,Δφ为两种展开函数的数值差。在控制包裹相位精度时,将上述约束条件作为第一层精度控制过程,为增强实际控制精度,离散化处理相位精度之间的梯度误差[5],整理处理为离散化的泊松表达式,采用最小二乘法不断逼近离散化的数值,并采用反变换的方式,余弦变换离散化的相位数值如式(7)所示:

式(7)中,φ(x,y)为余弦变换后的相位,其余参数含义不变。综合上述设定的处理过程,采用约束与余弦化处理的双重方式控制相位精度,进而控制测绘过程的精度。精度控制完毕后,构建城乡一体化地籍边缘拓展算法,实现对城乡一体化地籍的测绘。
1.3 完成测绘方法的构建
在上述设定的精度控制过程基础上,城乡一体化地籍存在着多种边缘区域,在精确测绘该部分区域时,采用调制传递函数计算边缘区域的可调制参数,数值关系如式(8)所示:

式(8)中,O(x,y)为边缘区域的传递相位;u为响应参数。对应整理上述数值关系中的像方与物方的比值后,实际产生的调制参数变化(如图2所示):
图2 调制参数数值变化
在图2所示的调制参数数值变化下,调制过程属于一个线性非移变过程,对应实际产生的移变,拓展处理调制后的地籍区域,拓展处理如式(9)所示:

式(9)中,L(x,y)为展调制相位;E(x)为分拓展函数。在上述拓展处理过程中,采用三频外差移变拓展函数的外插,预设外插的编码条纹低频处理拓展函数中连续相位,不断计算拓展函数中条纹阶数,控制地籍区域中的相位噪声数值。为控制地籍边界实际产生重叠,在边界区域相位数值关系内,选定双波长中的双质数,取双质数之间的最小间隔,以最小间隔内的互质,排除地籍区域之间的重叠。综合上述处理过程,最终完成基于相位条纹的城乡一体化地籍高精度测绘方法的设计。
2.仿真实验
2.1 实验准备
准备实验所需的条纹阵列探测器,探测器外部安装一个原始条纹相机CCD,负责采集探测器中的原始条纹,探测器以及相机CCD的参数(如表1所示):
在表1参数的探测器及相机参数下,在探测器的另外的接口处连接一个激光雷达原理样机,连接的样机参数(如表2所示):

表1 实验所需的探测器及相机参数

表2 实验所需的激光雷达原理样机参数
连接表2中原理样机参数后,搭建测绘工具的结构,搭建 的结构(如图3所示):

图3 搭建的测绘技术实验环境
在图3搭建的实验环境下,划定相同区域的城乡一体化区域作为测绘对象,在调试工具工作正常后,准备两种传统测绘方法与所设计的测绘方法进行实验,对比三种测绘方法的性能。
2.2 结果及分析
基于上述实验准备,标定15个CCD相机得到地区空间分布点后,控制三种测绘方法处理控制点的数据,定义三种测绘方法得到的高程误差,误差数值关系如式(10)所示:

式(10)中,为计算误差数值;为控制点的测量数据;为数量级参数。在高程误差关系控制下,对应计算三种测绘方法的高程误差,最终数值结果(如表3所示):

表3 三种测绘方法的高程误差 单位:m
在三种测绘方法控制下,对应计算各个控制点实际产生的高程误差,根据表3中的各项误差数值可知:传统测绘方法1产生的高程误差数值为0.085m,对应控制点产生的高程误差最大。传统测绘方法2实际产生的高程误差数值为0.071m,控制点实际产生的误差数值较小,而设计的测绘方法产生的高程误差在0.045m左右,与两种测绘方法相比,所设计的测绘方法实际产生的高程误差数值最小,符合高精度测量的实际。
保持上述实验环境不变,将设定的控制点整合在空间平面内,以横纵轴得到的数值作为平面测绘过程中产生的误差,汇总并绘制三种测绘方法产生的平面误差,误差结果(如图4所示):

图4 三种测绘方法平面误差结果
在三种测绘方法控制下,将标定控制点产生误差标定在二维空间范围内,将横纵数轴产生的误差处理为误差点,根据图4所示的平面误差结果可知:以数值为0的轴向作为零误差标准,传统测绘方法1误差点间的平面距离较大,实际对应产生的平面误差最大。传统测绘方法2误差点间的平面距离较小,该种测绘方法产生的平面误差较小,而所设计的测绘方法平面范围内的数据点无限趋向于零误差数轴,与两种传统测绘方法相比,对应测绘方法产生的平面误差最小。
在上述实验环境下,调用三种测绘方法内的追踪算法,以实际产生误差的测绘数据作为截止观测数据点,定义测绘方法的观测数据点越多,则表示该种测绘方法的定位效果越好,在标定的控制点作用下,最终三种测绘方法产生的观测数据点结果(如表4所示):

表4 三种测绘方法产生的观测数据点数量 单位:个
根据表4中观测数据点数量结果,在定义测绘方法的定位性能后,结合表中统计得到的数据点结果,传统测绘方法1在标定的控制点内得到的观测点数值为256个,对应该种测绘方法的定位效果不佳。传统测绘方法2得到的控制点数值为357个,观测数据点数量较传统测绘方法1多,实际的测绘定位性能较佳。而所设计的测绘方法实际得到的观测数据点为453个,与传统测绘方法相比,所设计的测绘方法的定位效果最佳,适合城乡一体化地籍的测量。
3.结束语
城乡一体化地籍是地域测量工作中最重要的环节,在日常的测绘过程中,常常出现测量误差或是定位不准确的问题,引入相位条纹的概念,设计地籍高精度测绘方法。构建地籍测绘过程中的算法,并保持测绘的精度,能够改善传统测绘方法中误差过大、定位效果不佳的问题。但设计的测绘方法并未使用测绘工具作出规范,在误差控制上还存在一定的研究空间,还需不断地研究改进。