具有安全防护功能的智能盲人服设计
2021-08-31薛哲彬江润恬刘丹宇
金 鹏, 薛哲彬, 江润恬, 刘丹宇, 张 弛
(1. 江南大学 纺织科学与工程学院, 江苏 无锡 214122; 2. 东华大学 服装与艺术设计学院,上海 200051; 3. 江南大学 设计学院, 江苏 无锡 214122)
盲人出行设备[1]是为视力残疾人士所设计的一类智能设备。根据世界卫生组织数据,截止到2018年中国约有1 700万失明人士[2]。我国拥有世界上最长的盲道,但由于设计不合理、易被车辆阻挡等因素,其利用率低下[3];我国登记持证的导盲犬只有百余只,无法满足需求,盲人群体存在着出行困扰[4],因此,针对盲人群体设计开发一种辅助出行的服装设备拥有广阔的发展前景。
本文从盲人实际出行需求入手,分析得到盲人服的设计要点。依据设计要点对服装进行载体与功能2方面设计,并以此进行服装与硬件设备的制作与搭配。在制作完成后对服装功能进行评测,并据此对未来盲人出行设备发展进行展望。
1 盲人出行产品的研究现状
目前,针对盲人出行产品的研究处于快速发展阶段,其中功能较为完备的产品有智能盲杖、手持式导盲产品、辅助性导盲系统、可穿戴式导盲产品4类[5-7]。
智能盲杖主要是在传统盲杖基础上,利用单片机技术、传感技术、无线通信技术等,为盲人提供导盲信息[8-9]。该类型产品使用范围广,贴合盲人使用习惯,但由于盲杖使用习惯及使用时的晃动感,对环境监测数据的准确性会带来一定影响。
手持式导盲产品通常用于室内导盲,其主要是通过使用手持式设备扫描、监测周围环境,根据设备的反馈作用进行行走判断[10]。该类型产品由于其使用的距离传感器的探测原理与功能限制,通常适用于室内导盲,不适用于光线较为强烈的室外导盲[11]。
辅助性导盲系统充分利用了智能手机等终端的功能优势,致力于解决盲人出行时导航问题[12]。这类型产品存在的问题是智能终端大都为触屏设计,不适用于盲人使用,且智能手机受限于探测距离,避障效果有待提升。
可穿戴式导盲产品通常包含服装、眼镜、背包等类别,其大都使用嵌入式技术,满足盲人的出行需求[13]。如朱爱斌等[14]基于双目视觉原理,设计开发了一种可穿戴导盲眼镜。该眼镜利用左右双图像传感器实现障碍物定位与识别,并利用单片机技术将提取信息以蜂鸣器或震动马达的形式反馈给使用者。该类型导盲产品由于其可穿戴性很适合盲人使用,但应注意电子元件对可穿戴载体舒适度的影响。
根据上述分析可知,目前盲人出行产品功能集中于避障、导航功能的设计研究,而对盲人在出行中可能遇到的危险规避功能、安全防护与报警功能研究较为缺乏。据此,本文拟设计制作一种具有安全防护功能的智能盲人服,该盲人服在满足盲人出行避障需求的前提下,增设安全防护功能,提升盲人出行的生理安全性与心理安全感。
2 智能盲人服设计方案
本文从盲人出行环境与需求入手分析得到服装设计要点,依据设计要点将服装设计分为服装载体设计与嵌入式系统设计。服装载体设计主要从警示性、气囊保护的角度进行设计阐述;嵌入式系统设计主要满足盲人对探路、摔倒检测、摔倒保护、摔倒报警功能的需求。
2.1 服装设计要点分析
盲人在日常生活中难以对身边物体进行有效识别,对可能存在的危险难以提前规避;在遇到危险摔倒时难以对自身产生较有效的保护;摔倒后无法对周边事物进行有效判断,在无法自救的情况下可能会产生一定危险;因此,针对盲人服的设计需要考虑以上3个方面的问题。
本文设计以服装为本体,配合嵌入式系统设计完成功能设计与实现。以上3个问题由服装的警示功能、探路功能、摔倒检测功能、摔倒保护功能、未起身报警功能来改善。探路功能可规避道路上可能出现的障碍物与危险;摔倒检测与保护功能用于检验穿着者是否摔倒,并在穿着者摔倒时给予保护;未起身报警功能可在盲人摔倒时判断其是否能自行起身,如果判断为不能,则会向监护人手机及网页发送报警信息。
2.2 硬件系统设计
2.2.1 处理器模块
硬件开发处理器设计使用Arduino Lite处理器开发板,该处理器尺寸为1.8 cm×4.8 cm,采用Atmel ATmega328单片机,支持TX、RX、AREF端,并兼容UNO系统,贴合服装的处理器需求。
2.2.2 探路功能模块
探路功能使用由Arduino Lite控制的距离传感器、蜂鸣器来实现。在本文设计中,使用URM07超声波距离传感器,其尺寸仅为27 mm×27 mm,有效测量距离为7.5 m,探测夹角约为60°。蜂鸣器选用Mini vibration motor,直径约为2 mm,整流方式为电流刷与换向器,可在2.5~3.5 V的直流电压下正常工作。
2.2.3 摔倒检测模块
摔倒检测根据其保护部位分为前侧摔倒检测及其他类型摔倒检测。摔倒检测功能使用由Arduino Lite处理器控制的加速度和倾角传感器实现,通过设置传感器阈值,当传感器检测值超过阈值时,则判定为使用者摔倒。本文设计中传感器使用ADXL345加速度与倾角传感器,其尺寸为20 mm×14 mm,可对±160 m/s2范围内的加速度进行高分辨率(13位)测量,同时也可用于测量静态或动态角度变化,其精度可达到0.25°。
2.2.4 摔倒保护模块
服装的摔倒防护由可多次充放气的气囊实现。当服装检测到穿着者摔倒时,则控制气瓶向气囊充气,以保护穿着者。气囊采用可拆卸设计,材质为高密度锦纶。其中压缩气瓶使用Klattermusen品牌小型高压气瓶,该气瓶质量约为50 g,长为5.5 cm,可在0.2 s内释放约12 g二氧化碳,具有安全稳定、质量轻、对穿着舒适性影响小等优点。针对两侧摔倒及后侧摔倒,气囊主要防护盲人颈部与胯部;针对前侧摔倒,气囊主要防护盲人手肘与膝盖处。
2.2.5 未起身报警模块
未起身报警功能用于在盲人摔倒后,若长时间未自行起身,由处理器控制的无线传输模块向监护人手机及与模块相连的网页端发送报警信息,同时处理器会控制服装上的蜂鸣器报警,以警示周边环境中路人或过往车辆。
对盲人是否起身的判定同样利用ADXL345传感器,通过角度与加速度的变化判断盲人是否起身。报警功能的实现由可装载SIM卡的GSM模块实现。GSM模块的型号为SIM900A,使用外接SIM卡进行GPRS通信。在对盲人无法自行起身完成判定后,Arduino Lite处理器控制GSM模块发送短信与定位信息至监护人手机,短信内容与相关手机号可在编译软件内设置。同时可利用该模块向Sparkfun服务器提供的IP(internet protocol)地址所在的网页传输数据,这一功能可实现对多套盲人服的定位监控与报警信息查询。
2.3 软件系统设计
2.3.1 传感器阈值设定
在进行操作系统的代码编译与上传之前,需对传感器的设定阈值进行确认。依据硬件系统功能,将需确认阈值分为探路功能阈值、摔倒判定阈值、未起身判断阈值。
2.3.1.1探路功能阈值 依据文献[13]所述,对距离传感器的阈值可根据主观需求进行设定。在本文中左右距离传感器阈值设置为1.5 m,前后传感器阈值设置为3 m,传感器将接收到的数据以数字信号形式反馈至Arduino Lite处理器,处理器判断其是否低于阈值,当外部物体距离过近低于阈值时,由处理器控制的蜂鸣器报警以警示穿着者。
2.3.1.2摔倒判定阈值 摔倒判定由加速度与角速度的变化情况共同决定。ADXL345加速度与倾角传感器采集人体加速度与角速度后,以浮点数的形式分别输出其变化情况。
通过区分加速度与角速度的变化值,可对日常动作与摔倒动作进行区分。为将日常动作时传感器加速度与角速度变化值与摔倒动作的变化值区分开,本文使用支持向量机(SVM)算法[15]进行数据区分。支持向量机是一种广义的线性分类器,广泛应用于统计分类以及回归分析中,适用于本文中日常动作及摔倒时数据变化的分类。
1)动作分类。由于盲人的生理特殊性,一般不进行跑步等剧烈运动,因此,将日常动作分为步行、上楼、下楼、站立、坐下、起立、弯腰、蹲起几类,动作集命名为D,如图1所示。摔倒动作由前侧摔倒、后侧摔倒、两侧摔倒、撞击摔倒构成,动作集命名为F。
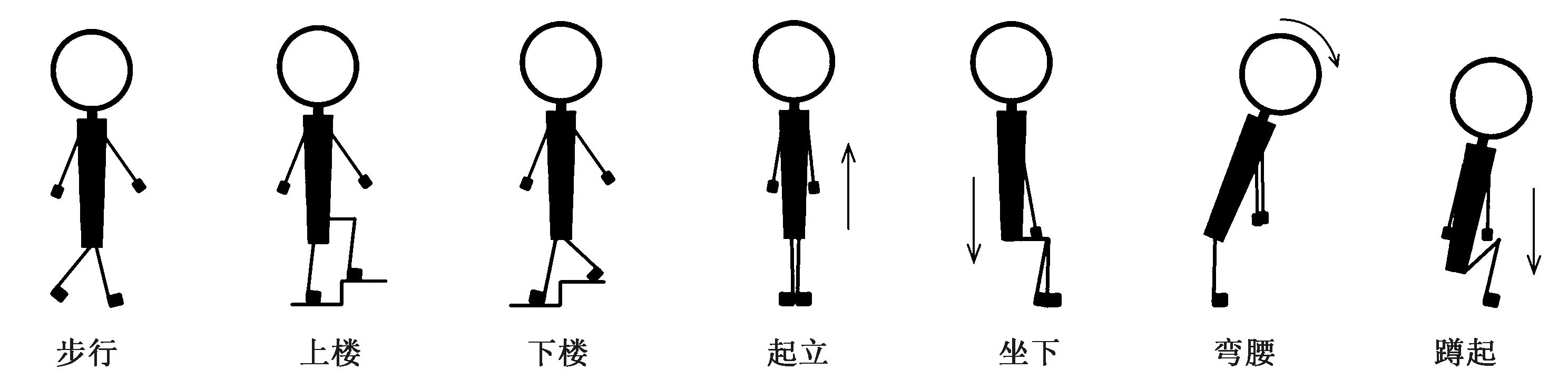
图1 日常动作示意图Fig.1 Daily action diagram
2)数据采集。本文数据采集的软件开发环境为适用于处理器的Arduino Lite软件,测试时传感器将数据变化值传输至Arduino Lite处理器,通过利用Arduino IDE软件编译数据处理程序,获取测试时的相关数据。其中日常动作的数据集命名为Hd,摔倒动作的数据集命名为Hf。
本文选取23名健康大学生参与数据采集工作,大学生中男性16人,女性7人。男性受试者身高为(176±3) cm, 体重为(73±4.6) kg,年龄为19~23岁;女性受试者身高为(161±5) cm,体重为(48±5.3) kg,年龄为18~23岁。测试前将传感器、处理器置于后颈处进行数据收集与处理。测试时受试者先实施1次动作集D中动作,结束后实施1次动作集F中动作,每人重复实验10次,收集数据。表1示出测试数据搜集情况。

表1 动作数据集Tab.1 Data sets of different actions
3)数据预处理与特征值提取。为减少外界对数据干扰,消除数据噪音,采用卡尔曼滤波对数据进行预处理[16]。由于每条数据的采集持续时间比实际动作持续时间长,为减少工作量与算法训练时间,对预处理后的数据进行特征值提取操作。截取数据最大值前后1 s内的数据,据此提取特征值。
本文以合加速度为例进行讲解,合加速度A在一定程度上可表征人体运动的幅度,提取该段时间内合加速度的最大值Amax及其左右临近的2个峰值Amax1和Amax2。计算公式为
式中,ax、ay、az分别表示x、y、z轴方向上的加速度,m/s2。
提取日常运动与摔倒时加速度变化的3个特征值Amax、Amax1、Amax2。其中日常运动加速度特征值的集合命名为Gda,摔倒动作加速度特征值的集合命名为Gfa。
依据上述方法,对日常动作与摔倒动作角速度特征值的集合Gdp与Gfp进行提取整理。
5)支持向量机。本文利用支持向量机对上述集合进行最优分类超平面求解。若上述集合为线性可分,则该算法可划分出一个最大程度的超平面;若上述集合为线性不可分,本文使用高斯核函数将集合映射至高维空间,使其在高维空间中线性可分。编译语言使用Python 3,利用Scikit-learn工具进行实验平台的搭建。函数为
式中:m、n表示特征向量;σ为高斯分布的方差。
6)阈值求解。经过训练计算可得上述集合的特征空间维数为1,最佳分类面为点,其最优分类超平面的值xa1为2.91,xa2为12.15 m/s2,即摔倒动作合加速度阈值为28.52 m/s2(重力加速度取9.8 m/s2, 下同),日常动作合加速度阈值为12.15 m/s2。 同理可得摔倒动作合角速度的阈值为62.3 (°)/s。 据此,对摔倒动作判定阈值设定为合加速度超过28.52 m/s2,合角速度超过62.3 (°)/s时,则认为摔倒动作成立。
由于前侧摔倒与其余类型摔倒防护部位不同,因此,针对前侧摔倒的阈值判定略有不同。区分的依据为Z轴加速度的正负值,前侧摔倒时Z轴加速度为负值,其余摔倒时则为正值,因此,在程序编译时据此进行区分,以判别不同的摔倒动作,控制不同的气囊开关。
2.3.1.3未起身判定阈值 未起身判定阈值的确认与探路功能阈值类似,主观性较强。其阈值主要为加速度与倾角传感器的合加速度变化值、角度与时间。由于在摔倒后,传感器与垂直方向上的倾角数值较大,因此,阈值设定为合加速度变化值小于9.8 m/s2, 倾角传感器与垂直方向倾角大于75°且持续时间超过1 min,即可判定无法自行起身。具体数据也可在处理器程序编译时进行调整。
2.3.2 操作系统及程序编译
本文单片机相关程序均使用Arduino IDE软件完成。编译程序前需要下载相应编码库以支持不同硬件的编译与烧录。
在编译前下载相应编码库,如Serial库、GSM与GPS的支持库等,并将硬件间波特率统一为9 600,在void setup()函数内设置传感器相应阈值,声明引脚的输入输出模式与串口通信模式,在void loop()中写入阈值判定流程;针对单片机与手机端之间的短信互联问题,于void SendTextMessage()函数内部进行编译。代码编写完成后,将代码烧录至处理器。
2.3.3 应用软件设计
为使由GSM模块发送的位置信息通过移动端实时显示,本文设计中盲人服系统移动端的实时显示功能由网页实现。通过在页面中添加新设备,对多个用户进行实时监护,便于社区内部对盲人用户的帮助及保护。通过使用Sparkfun服务器所提供的IP网址,可将由GSM模块发送的经纬度信息转换为详细地图,并在页面中显示穿着盲人服的用户是否摔倒以及摔倒后是否可自行起身,以便于监护人对盲人的实时监护。同时,可在网页中设置电子围栏功能,便于查看用户是否偏离相关活动区域。
2.4 服装载体设计
由于生理原因,盲人难以发觉周围环境中潜在的危险,因此,盲人服应具有一定警示效果。服装的警示功能需要考虑:产生足够的警示效果;对服装结构及穿着舒适性无较大影响;制作成本低,制作工艺简单。考虑以上因素,服装的警示功能由缝制于服装上的反光条实现。反光条的缝制位置为前胸、后背、袖子等部位,反光条材质为高亮度反光聚氯乙烯(PVC)。 服装颈部、胯部、手肘、膝盖处缝合可多次充放气的气囊。
为便于固定传感器,服装采用多口袋设计,另配有带魔术贴的可拆卸式扣带,在使用时绑于下腰、手小臂、大腿处,以便于装配相关硬件,如图2所示。
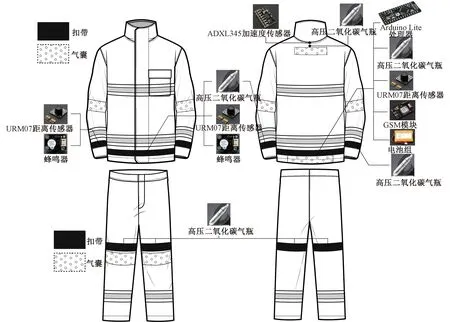
图2 服装结构图与硬件放置位置Fig.2 Clothing structure diagram and placement of hardware
2.5 硬件连接与服装结合
为便于拆卸,提升穿着舒适性与服装可洗性,本文设计中各硬件模块通过装配于带魔术贴的扣带上,并在使用时装置于扣带相应位置。同一扣带上的硬件间使用杜邦线进行连接,不同扣带之间的硬件通过导电纱线连接,导电纱线规格为22.0 tex镀银锦纶纱线。从美观性角度考虑,扣带上预设的接口置于扣带背面。
本文设计中,采用5 V电池组为各硬件模块供电,电源正极分别与Arduino Lite处理器的0号引脚以及URM07传感器、ADXL345传感器、GPS模块的VCC引脚相连,为其供电。同时,Arduino Lite处理器的1、2、3、4、5号引脚分别与URM07传感器的OUT引脚、ADXL345传感器的SDA引脚、SDL引脚、GPS模块的TXD、RXD引脚相连以进行数据传输。处理器的10号引脚与蜂鸣器相连为其供电。各硬件模块之间的接地(GND)引脚相连。
3 实验检测与数据修正
为验证盲人服功能的有效性与稳定性,需进行实验检测。实验分为服装舒适性测试、警示功能测试、探路功能测试、摔倒检测与防护功能测试、未起身报警功能测试5个方面。
3.1 服装舒适性测试
为检测嵌入式硬件是否给服装的穿着带来舒适性影响,本文利用主观评价方法对盲人服及与未嵌入硬件的相同普通服装进行舒适性比较判断。
3.1.1 主观舒适性指标确认
主观舒适性评价能够直观有效地反映一个人对某一服装的主观感受[17]。服装舒适性的主观评价指标分类[18],将其确定为热感、湿感、闷感、黏感、厚重感、活动受限感、硬度、紧身感。主观评价的标尺选用Fritz七级语义差异标尺,即1分(极不)、2分(非常不)、3分(较不)、4分(适中)、5分(较)、6分(非常)、7分(极)[19]。
3.1.2 实验流程与实验结果
参与客观评价实验的人员为10名大学生志愿者,其均为身高(176±3) cm,体重(73±3.3) kg,年龄为20~25岁的健康男性。测试对象为本文研究提出的智能盲人服和普通服装。人工气候室(日本爱斯佩克公司)温度控制范围为-35~65 ℃,相对湿度调节范围为0%~100%。测试前所有受试者将被告知本文实验的具体步骤以及需要他们配合的相关工作。
主观评价测试实验分为5个阶段:第1阶段为静坐10 min;第2阶段为轻度运动,受测试人员需要在跑步机上以3 km/h的速度运动10 min;第3阶段为中强度运动,受测试人员需要在跑步机上以6 km/h 的速度运动10 min;第4阶段进行6次图1所示动作,时长为10 min;第5阶段为静坐10 min。每阶段结束时进行1次主观评价打分。
图3示出主观评价的打分结果,其分值取受试人员的打分平均值。可看出,智能盲人服在热、湿、闷、黏、活动受限感、硬度指标方面与普通服装几乎无区别,但在厚重感、紧身感方面不如普通服装舒适。

图3 舒适度主观评价分值Fig.3 Subjective evaluation score of comfort. (a) Score of warmth; (b) Score of wetness; (c) Score of stuffiness; (d) Score of stickiness; (e) Score of heaviness; (f) Score of restricted activity; (g) Score of hardness; (h) Score of tightness
3.1.3 服装整体舒适性判定
为更好地表征服装的整体穿着舒适性,根据以上测试指标,利用模糊综合评价法对智能盲人服及普通服装的综合舒适性进行评判。本文中服装整体舒适性的结果难以量化,模糊综合评价法可有效解决该问题。
3.1.3.1模糊综合评判法 作为模糊数学中的一类评价方法,其可将模糊的主观评价转化为定量评价[20],对本文中主观舒适度评价的量化具有良好的作用,可将服装的主观舒适性转化为更直观的数字评价。



表2 衡量标尺Tab.2 Measurement scale

W=(0.32,0.27,0.41)
依据上述方法,可分别计算得出热湿性舒适指标、接触性舒适指标、适体型舒适指标各自权重W1、W2、W3。
W1=(0.33,0.37,0.30)
W2=(0.36,0.35,0.29)
W3=(0.53,0.47)
3)构建评价矩阵R:以热湿性舒适指标u1为例,利用盲人服第4阶段结束时的评分数据建立评价表,提取模糊评价矩阵R1。
4)评价矩阵R和权重W的合成
对模糊评价矩阵R1进行加权,根据下式得出热湿性舒适指标u1的模糊综合评判结果S1。
S1=W1·R1
S1=(0,0,0,0.186,0.427,0.313,0.074)
依据该方法可计算得出热湿性舒适指标u1、接触性舒适指标u2、适体性舒适指标u3的模糊综合评判结果Si。将W与Si矩阵相乘可得到服装的二级模糊综合评价矩阵S。并利用下式计算得出服装的综合舒适性评价分值Ni。
Ni=S·ET
式中,E为Fritz七级语义差异标尺矩阵。
经过计算,智能盲人服的舒适性综合评分N1为5.07分,普通服装的舒适性综合评分N2为4.93分,差值为0.14分。依据评测结果可看出,嵌入硬件的盲人服舒适度略微低于同类型普通服装。
3.2 服装警示效果测试
服装警示效果测试主要考察在昏暗环境中服装的醒目效果。实验分为针对盲人服所设实验及对比实验。测试地点位于室内,测试光照强度的仪器选用DT-1300型手持式光照度计(中国聚创环保有限公司),测试时穿着盲人服的受试人员A行走或站立,使上述10名无视力障碍大学生志愿者在距A人员5、10、20、50 m处站定,观察在光照强度为0.2 lx 条件下服装的醒目效果。
警示效果的判断依据为对A人员的提前甄别效果及其身体轮廓及关键部位的可辨识度。分值分为0分(无效果)、1分(效果较差)、2分(效果一般)、3分(效果较好)、4分(效果很好)5档。对比实验的受测试对象为同色系的普通服装,实验流程与条件同上。实验相关数据如表3所示。依据测试数据可看出,在昏暗条件下普通服装几乎无醒目效果,在距离20 m以内盲人服的警示效果良好。

表3 服装醒目性测试数据Tab.3 Test data of clothing eye-catching
3.3 服装探路功能测试
该部分测试通过模拟日常出行环境,检测实际穿着时服装对障碍物的识别效果,从而判断设备的探路功能。测试地点为某单位内部道路,该路段设置有盲道,主要障碍物包括树木、灌木丛、花坛、行人、自行车、垃圾箱等常见物。测试时穿着盲人服的受试人员根据盲道路线进行走动,通过检测盲人服对盲道周围障碍物的识别效果来判定服装的避障效果,其中判定成功的次数为服装成功识别障碍物并成功提醒实验人员的次数。
经过测试,盲人服对后侧及左右障碍物的识别成功率均达到100%,对前侧障碍物的识别成功率可达到95%。服装胸前的距离传感器成功率未达到100%,其原因为部分障碍物低于传感器高度,传感器对过低障碍物识别效果不佳。通过调低传感器高度可有效解决这一问题。同时,在实际使用时传感器高度也可根据穿着者身高进行调整。
3.4 摔倒检测与防护功能测试
为检验盲人服对不同体型特征人群的适应情况,选取10名身高为(175±12) cm,体重为(72±11) kg 的受测试人员。测试内容分为前侧摔倒、后侧摔倒、左侧摔倒、右侧摔倒、撞击摔倒5个部分,每部分实验20次。后测摔倒气囊展开的测试效果如图4所示。

图4 后侧摔倒气囊展开效果测试Fig.4 Tests of back side fall airbag deployment
经过测试,盲人服针对前侧摔倒、后侧摔倒及撞击摔倒的判定成功率为100%,而左侧摔倒、右侧摔倒的成功率为95%。在后侧摔倒与撞击摔倒时,合加速度与合角速度变化比其他几种类型更快,其峰值也更大。为提高摔倒判定成功率,将合加速度阈值下调至27.44 m/s2, 合角速度阈值下调至60 (°)/s。经过测试,阈值调整后的摔倒判定成功率均达到100%。
气囊展开速度使用Arduino Lite软件协助测定。图5示出某次摔倒时串口监测的合加速度与合角速度的变化情况。由于气囊充气完成大约需0.1 s,串口通信的时间以毫秒计,此部分时间可忽略不计,因此,从判定摔倒至气囊展开所需时间约为0.1 s。由图5可知,摔倒动作达到阈值(a点)时仍需约0.5 s才可完成与地面间的碰撞动作(b点),因此,系统对气囊展开的预留时间满足实际需求。
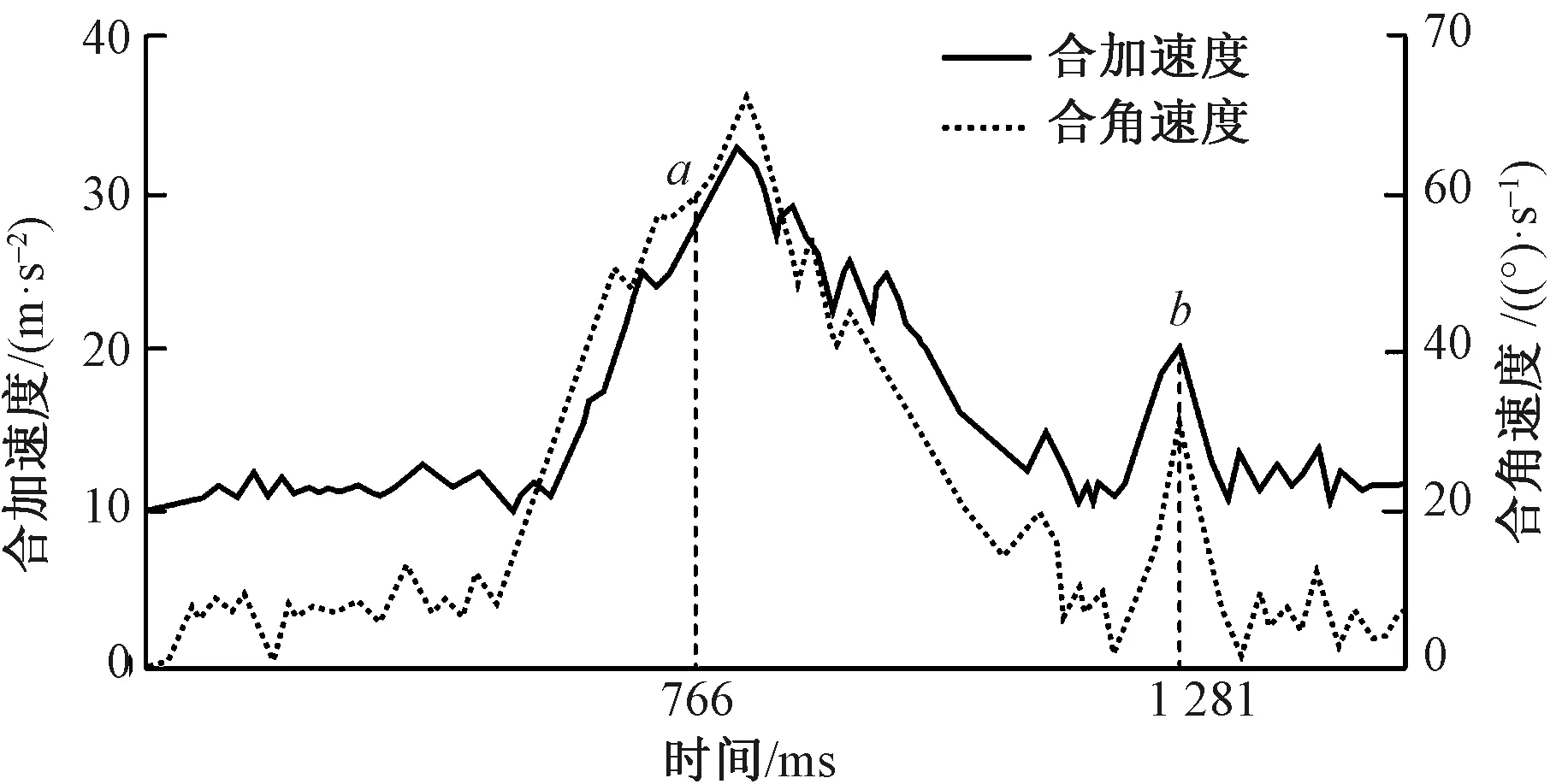
图5 合加速度与合角速度变化情况Fig.5 Change of combined acceleration and combined angular velocity
3.5 未起身报警功能测试
未起身报警功能的测试设置于摔倒检测功能测试之后,在对摔倒判定成功后,处理器进入未起身报警功能的判定程序。测试前需要注意服装上Arduino Lite处理器的无线通信是否良好,并通过AT指令测试电路连接是否存在问题。
对于未起身判定的测试标准可根据实际使用情况进行阈值修改。本次测试的判定阈值为质量变化值小于9.8 m/s2、倾角传感器与垂直方向倾角大于75°且持续时间超过1 min,此时判定为穿着者无法自行起身。在实际穿着时,相关数值可根据使用者具体情况在程序内进行调整。
该部分功能测试地点位于某市大学内,实验由4位受测试人员组成。其中3人穿着盲人服随机分布于学校内部并不断移动方位,剩余1人使用手机与电脑Web端接收相关实验数据以判定服装未起身报警功能的有效性。图6示出实验过程中服装完成未起身判定后Web端接收到的相关页面信息,其中地图红线内部为1号电子围栏范围。

图6 Web报警页面Fig.6 Alarm page of the web
经过测试,未起身报警功能完备,相应报警信息与位置信息可及时发送至程序预设手机号及相应网页。
4 结 论
本文基于智能服装技术,提出一种满足盲人实地出行需求的盲人服设计方案。该方案载体为盲人服,其具有警示功能、探路功能、摔倒检测与防护功能、摔倒报警功能。经过测试,智能盲人服舒适度在厚重感、宽松感方面不如同种普通服装舒适,七分制评分下总体舒适性差值为0.14分;警示效果满足出行需求,昏暗环境中20 m以内警示效果良好;服装对左右障碍辨识度高,对前后障碍物辨识度低于左右障碍,通过调低传感器高度可解决该问题;摔倒检测与防护功能通过使用三轴加速度与倾角传感器检测合加速度与合角速度变化来判定摔倒情况,根据摔倒类型保护肘部、膝盖或颈部、胯部;未起身报警功能可有效保护无法自行起身的穿着者,并及时将报警信息与位置信息发送至监护人手机及Web端。本文设计总体上功能完备,完成度较高,可实地用于日常出行。
本文设计仍存在不足之处:嵌入式硬件与服装的结合方式对服装的宽松感、厚重感方面存在一定影响;硬件元件品控不一,寿命不同,在使用过程中有一定损耗;目前设计仍针对单一个体的个人防护,未来应使用Web、APP等对防护人群与相关硬件进行集中化管理,打造用户社群。
