基于变步长扰动逼近法的移动式在线光伏充电MPPT 技术
2021-08-31高佳俊李维波李齐邹振杰卢月
高佳俊,李维波*,,李齐,邹振杰,卢月
1 武汉理工大学 自动化学院,湖北 武汉 430070
2 西藏大学 供氧研究院,西藏 拉萨 850012
0 引 言
随着科技的不断进步和对环保要求的不断提高,从化石能源转向可再生清洁能源已成为人们关注的焦点之一。对于移动平台而言,其最大的难题表现为:无法在短时间内将蓄电池充满;由于移动平台的空间尺寸约束,无法采用容量太大的蓄电池,这将导致单次充电的储能过少,故其有效使用时间较短[1-3]。然而,如果把思路聚焦到太阳能上,对于周身在较强光照环境下的移动平台而言,采用光伏作为蓄电池的充电能量来源,既可实现蓄电池“边用边充”的在线充电效果,又可兼顾节能环保要求。
目前,移动平台的光伏充电器有2 种主流形式,一种是非隔离型,另一种是隔离型[4-6]。非隔离型的光伏充电器一般采用2 级DC/DC 变换器的主拓扑结构,其中前级DC/DC 变换器用于最大功率点跟踪(maximum power point tracking,MPPT)、后级DC/DC 变换器则用于充电控制。这种方案的优点是2 级结构设计简单、独立运行且协调控制,但是由于该方案中光伏板和蓄电池之间没有隔离,所以共模干扰的问题较严重,且在外部环境比较恶劣时的干扰更为突出,这将明显影响其充电效能。而市面上主流的隔离型光伏充电器分为2 种,一种采用工频变压器,另一种则采用高频变压器。由于移动平台对设备尺寸的约束要求很严格,所以工频隔离方式并不适用。目前,移动平台大多采用高频隔离型充电拓扑,即“光伏板—BOOST 电路—高频逆变—高频变压器—高频整流—DC/DC—蓄电池”的经典拓扑。其中BOOST 电路用于执行MPPT 算法跟踪任务,高频逆变高频变压器旨在解决隔离问题,而DC/DC 变换器则用于实现充电控制。该拓扑结构的优点是在兼顾MPPT 控制和充电控制的同时,减少外界环境的干扰,尤其是光照条件变化的不良影响。不过,如果该拓扑的级数太多,则将限制其变换效率[7-9]。
为了解决光伏板和蓄电池之间的电气隔离问题,以及系统的变换效率限制问题,本文拟提出一种采用高频逆变器与隔离变压器共同作为MPPT载体的移动光伏充电拓扑。通过借助变步长扰动逼近法进行MPPT 算法跟踪,同时将高频整流和后级DC/DC 变换器合并,将充电控制与高频逆变的脉冲调制相结合,最终将高频隔离、MPPT 跟踪和充电控制三大功能集成一体。该方案既继承了高频隔离拓扑的优势,又减少了变换级数,可以最大限度地提高在线充电装置的转换效率。
1 移动光伏充电装置的主拓扑
图1 所示为在线光伏充电装置的主拓扑,主要由光伏板、直流与缓启动、高频逆变器、高频变压器、高频整流器、输出滤波、蓄电池和主控板组成,其中主控板由数字输入(digital input,DI)电路、数字输出(digital output,DO)电路、输入模拟信号采集电路1、输出模拟信号采集电路2、环境信号采集电路、驱动模块和通信模块等组成。
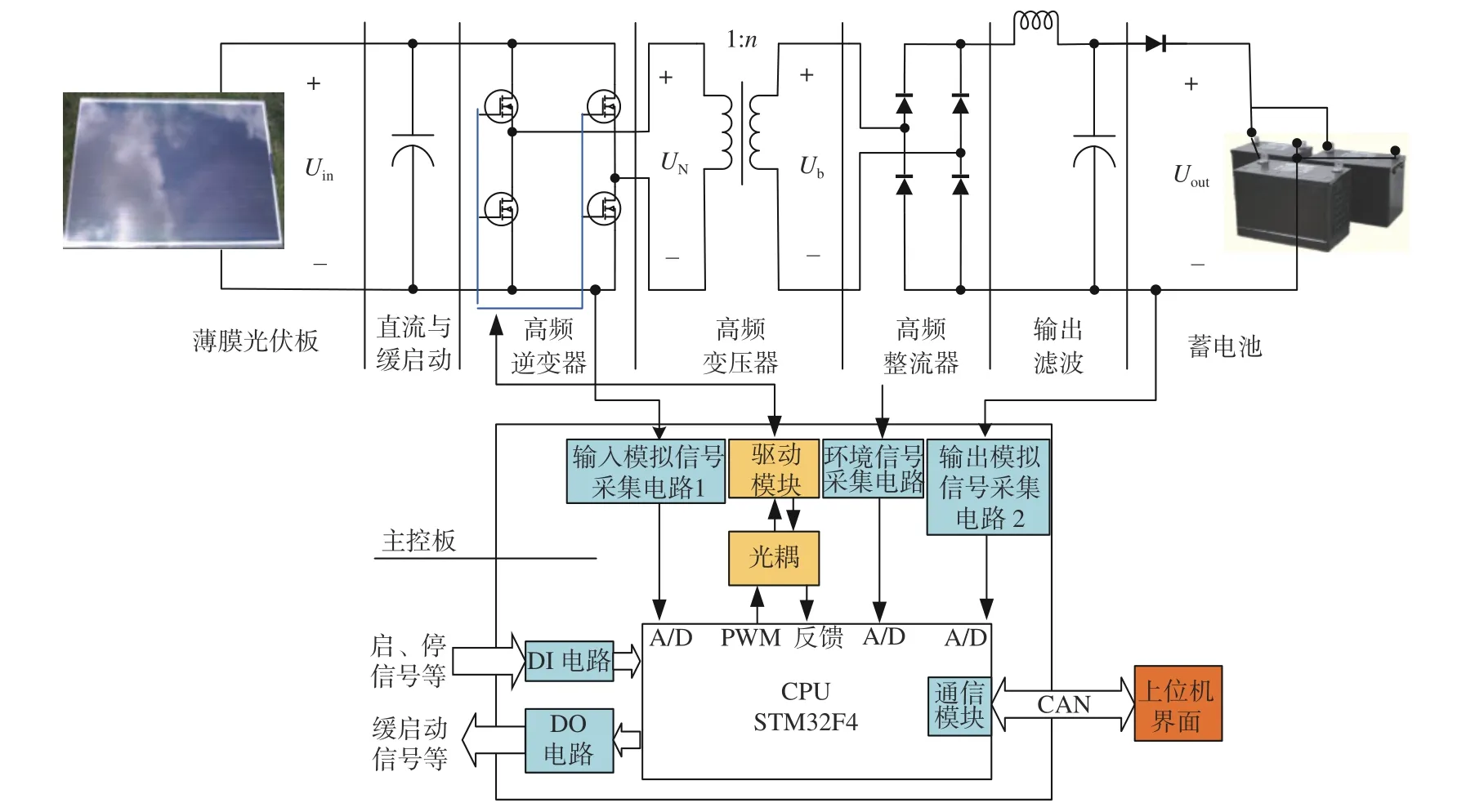
图1 在线光伏充电装置的主拓扑Fig. 1 Main topology of photovoltaic online charging device
图1 中:Uin为高频逆变器的输入电压,即光伏板的输出电压;UN为高频逆变器的输出电压;n为高频变压器的匝数比;Ub为高频变压器的输出电压;Uout为高频整流器的输出电压,即加载在蓄电池两端的充电电压。此外,DI 电路的作用是输入启、停信号;DO 电路的作用是输出缓启动信号;输入模拟信号采集电路1 的作用是采集高频逆变器的输入电压和电流,即光伏板的输出电压和电流;输出模拟信号采集电路2 的作用是采集蓄电池的充电电压和电流;环境信号采集电路的作用是采集功率模块的温度、工作环境的湿度;驱动模块的作用是连接功率模块,以控制高频逆变器中IGBT 晶体管的闭合和断开;通信模块的作用是经由CAN 通信来连接上位机界面。
2 变步长扰动逼近法MPPT 策略
2.1 光伏板的输出特性曲线
本文以某块650 W 的光伏板作为研究对象,开展仿真及工程验证。图2 所示为光伏板在不同温度和光照条件下的I-U输出曲线和P-U输出曲线,其中I,U,P分别为光伏板的输出电流、输出电压、输出功率。图2(a)为光照强度Ir=1 kW/m2时,不同温度条件下的输出曲线;图2(b)为温度T=25 ℃时,不同光照强度条件下的输出曲线。由图2 可知,I-U输出曲线存在一个拐点;而P-U输出曲线是存在一个单峰值的非线性曲线,其峰值即光伏板的最大功率点。当光照强度Ir=1 kW/m2时,随着温度的增加,光伏板的输出电压和输出功率均有所下降;当温度T=25 ℃时,随着光照强度的增加,光伏板的输出电流和输出功率均相应升高。

图2 光伏板的输出特性曲线Fig. 2 Output characteristic curves of photovoltaic panel
2.2 变步长扰动逼近法MPPT 理论
本文所采用的高频逆变器为方波逆变,其与隔离变压器共同作为MPPT 载体,其输入/输出电压满足以下条件:

式中:D为高频逆变器的占空比;k为方波不控整流的变换系数。
将式(1)进行简化,则光伏板输出电压与蓄电池两端充电电压的关系为

由式(2)可知,当高频变压器的匝数比n为固定值时,蓄电池的充电电压Uout取决于光伏板输出电压Uin和高频逆变器占空比D。当太阳光强的变化较小时,如需提高充电电压Uout,则应增加高频逆变器的占空比D;反之,如需降低充电电压Uout,则应减小占空比D。由此可见,为了增加光伏板的利用率以及蓄电池的充电速度,只需通过控制高频逆变器的占空比D,即可确保充电系统尽可能工作在最大功率点,从而实现MPPT 算法跟踪。
目前,常用的MPPT 算法包括恒定电压跟踪法、短路电流比例系数法、电导增量法和扰动观察法[10]。前2 种方法为开环控制,即根据光伏板在标准测试环境下的曲线,控制充电电压达到一个恒定值,该类算法运行简单、成本较低,但在外部环境实时改变的移动平台上,无法实现光伏板最大功率点的有效跟踪。后2 种方法为闭环控制,其中电导增量法需时刻计算功率值的导数,所以算法偏复杂,计算速度较慢;而扰动逼近法可以有效地跟踪光伏板的最大功率点,其运行相对简单、成本也比较低[11-13]。
因此,本文将采用基于变步长的扰动逼近式MPPT 算法,其基本原理是:通过观察光伏板的输出功率及电压变化,来调节高频逆变器的占空比,进而改变充电电压Uout,最终实现最大功率点的跟踪功能。图3 所示为基于变步长扰动逼近式MPPT 算法的流程,其中:Dt和Dt-1分别为当前时刻和前一时刻的占空比,Pt和Pt-1分别为当前时刻和前一时刻的输入功率;Ut和Ut-1分别为当前时刻和前一时刻的输入电压。

图3 基于变步长扰动逼近法的MPPT 算法流程Fig. 3 MPPT algorithm flowchart based on variable step size disturbance approximation method
如图3 所示,基于变步长扰动逼近式MPPT算法的主要流程为:
1) 首先,输入初始占空比D0和干扰步长ΔD。
2) 然后,令Dt-1=D0,Pt-1=0,并采集当前时刻的输入电压Ut和输入电流It,进而计算输入功率Pt、功率变化ΔP以及电压变化ΔU。
3) 最后,根据ΔP和ΔU的变化趋势,调整在线变步长扰动的逼近趋势,即调整光伏充电装置中高频逆变器占空比D的变化趋势。判定原则为:(1)当ΔP>0 且ΔU>0 时,应减小占空比D,令Dt=Dt-1-ΔD;(2)当ΔP>0 且ΔU<0 时,应增加占空比D,令Dt=Dt-1+ΔD;(3)当ΔP<0 且ΔU>0 时,应增 加 占 空 比D,令Dt=Dt-1+ΔD;(4)当ΔP<0 且ΔU<0 时,应减小占空比D,令Dt=Dt-1-ΔD。同时,令Pt-1=Pt,Dt-1=Dt,即将本次循环中当前时刻的功率和占空比,赋值到下一个循环中,并作为下一个循环在前一时刻的功率和占空比。
3 蓄电池的充电控制策略
由于蓄电池电压将随着其剩余电量(state of charge,SOC)的增加而增加,为了同时保证蓄电池充电的速度和安全性,可以通过采集蓄电池两端的电压、电流来判断蓄电池的SOC 情况[14],即

式中:SOCbat(t),SOC0分别为蓄电池的当前电量和初始电量,其中SOC0由蓄电池的自身属性和所采集的初始电压决定;ibat为蓄电池的充电电流;t为充电时间;Cbat为蓄电池的容量。
根据式(3),SOC 的估算流程如图4 所示,其中SOCt和SOCt-1分别为当前时刻和前一时刻蓄电池的剩余电量。首先,输入蓄电池容量Cbat,采集蓄电池的初始电压U0;然后,计算蓄电池的初始电量SOC0,并令SOCt-1=SOC0;最后,采集充电电流ibat,根据式(2)计算当前t时刻的蓄电池剩余电量SOCt。

图4 SOC 估算流程图Fig. 4 Flowchart of SOC estimation
根据蓄电池的SOC 情况,本文将采用三段式充电方法,即:MPPT 最大功率充电阶段、恒压限流充电阶段和浮充电阶段,如图5 所示。
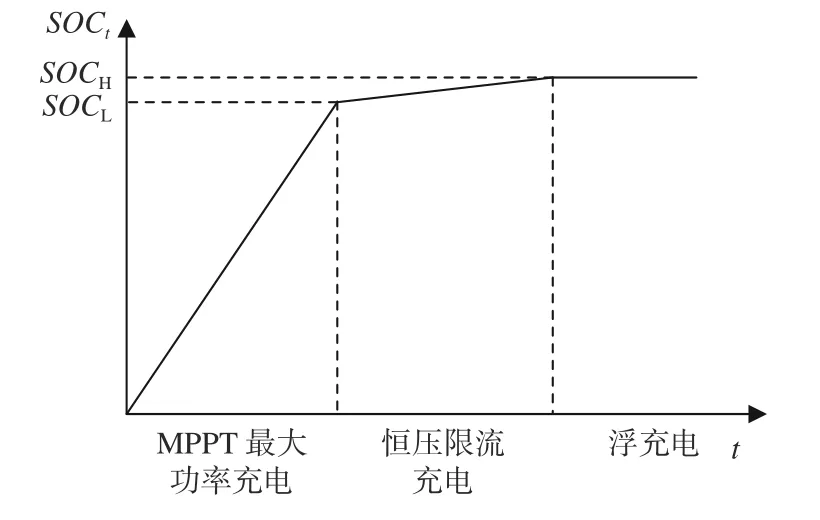
图5 三段式充电示意图Fig. 5 Schematic diagram of three stages charging
1) MPPT 最大功率充电阶段。
在充电初期,蓄电池的剩余电量较少,将采用MPPT 最大功率的方式对蓄电池进行充电,从而使光伏板工作在最大功率点,以确保蓄电池的充电速度。为了在蓄电池容量接近充满时防止过充,应设置最低阈值SOCL,当SOCt>SOCL时,装置即可转入恒压限流充电阶段。
2) 恒压限流充电阶段。
此时蓄电池已经基本充满,为了达到安全充电的目的,应通过降低高频逆变器的占空比来降低光伏板的功率,从而对蓄电池进行低电流充电,以有效避免蓄电池过充。为了防止蓄电池自身放电而导致电量下降,应设置最高阈值SOCH,当SOCt>SOCH时,装置随即转入浮充电阶段。
3) 浮充电阶段。
此时蓄电池已经充满,应进一步降低高频逆变器的占空比,以再次降低光伏板的功率,仅以微弱的电流对蓄电池进行充电,从而使蓄电池电量始终保持在充满的状态。因此,该阶段也意味着整个充电过程的结束。
充电控制策略流程如图6 所示。
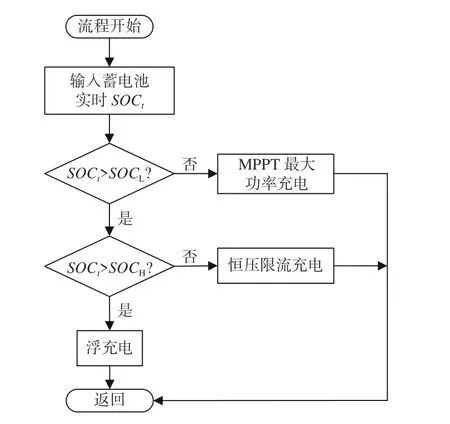
图6 三段式充电控制策略的流程图Fig. 6 Flowchart of three-stage charge control strategy
4 建模与仿真分析
为了验证本文提出的基于变步长扰动逼近法的MPPT 控制策略和蓄电池充电控制策略的可行性及有效性,根据在线光伏充电装置主拓扑(图1),采用Matlab/simulink 仿真软件搭建移动光伏充电装置,其仿真模型如图7 所示,关键性仿真参数如表1 所示。

表1 在线光伏充电装置的关键性仿真参数Table 1 Key simulation parameters of photovoltaic on-line charging device

图7 在线光伏充电装置的仿真模型Fig. 7 Simulation model of photovoltaic on-line charging device
图7 中:“光伏板输出曲线”模块为本文的输入测量,包括光伏板光照强度Ir、光伏板输出电流I_PV、光伏板输出电压V_PV、光伏板输出功率P_PV;“蓄电池状态”和“充电曲线”模块为本文的输出测量,包括蓄电池充电电流I_Battery、蓄电池充电电压V_Battery、蓄电池充电功率P_Battery、蓄电池剩余电量SOC。
4.1 MPPT 控制策略的仿真验证
通过调节光伏板输入的光照强度,模拟现实环境中的正常光照以及遮光环境,从而改变光伏板的最大功率点,随即观察光伏板的输出电压、电流和功率以及蓄电池的充电电压、电流、功率和SOC 状态,即可验证基于变步长扰动逼近法的MPPT 算法跟踪的准确性,其仿真结果如图8所示。

图8 基于变步长扰动逼近法的MPPT 仿真波形Fig. 8 MPPT simulation waveform based on variable step size disturbance approximation method
由图8(a)可知,在0~10 s 内,光伏板工作在标准光照条件下;第10 s 时刻,突然降低光伏板的输入光照强度以模拟现实环境中的遮光情况;第20 s 时刻,恢复到标准光照强度。仿真结果表明:充电装置可以快速跟踪光伏板的最大功率点,从而让光伏板一直运行在最大功率状态对蓄电池进行充电;当光照强度降低时,光伏板的输出功率随之降低,蓄电池的充电速度也相应变慢。
光伏板输出功率P_PV 和蓄电池充电功率P_Battery 的对比结果如图9 所示,根据仿真结果,在线充电装置在中间环节损耗的电能较小,光伏板可以实现对蓄电池的高效充电。
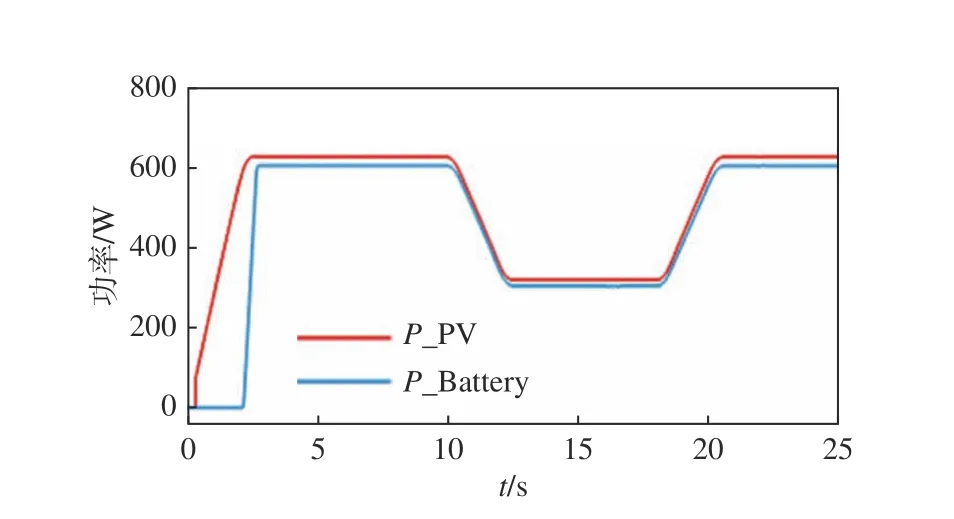
图9 光伏板输出功率和蓄电池输入功率的对比曲线Fig. 9 Comparison curves between output power of photovoltaic panel and input power of battery
4.2 蓄电池充电策略的仿真验证
由于本文将高频逆变器与高频隔离变压器共同作为MPPT 载体,所以Simulink 的采样频率赋值较高。为了在短时间内模拟蓄电池的三段式充电过程,首先将蓄电池的容量减小到0.01 Ah,同时在蓄电池充电策略仿真验证的第一阶段(即MPPT 最大功率充电阶段)中,令光伏板的光照强度一直保持1 000 W/m2,其仿真结果如图10 所示。

图10 三段式充电的仿真波形Fig. 10 Simulation waveform of three stage charging
由图10 可知,在充电初期,在线充电装置采用MPPT 最大功率充电,即光伏板工作在最大功率点,此时蓄电池迅速充电,其蓄电池电压随着SOC的增加而增加。当蓄电池SOC达到SOCL时,根据本文设计的蓄电池充电控制策略,装置进入第二充电阶段,即恒压限流充电阶段。虽然此时光伏板的光照强度依然为1 000 W/m2,但是由于高频逆变器占空比的降低,使得光伏板功率随之降低,进而降低了蓄电池的充电电流,同时维持蓄电池的两端电压恒定。由于蓄电池内阻将随着SOC的增加而增加,所以在恒压限流充电阶段的充电电流会缓慢下降。当蓄电池SOC接近SOCH时,第二阶段结束,装置进入第三充电阶段,即浮充电阶段。此时高频逆变器占空比将进一步减小,使得光伏板功率再次降低,从而维持较低的蓄电池电流,以避免因蓄电池自身放电而导致的电量下降,进入此阶段也意味着整个充电过程的结束。
5 工程化测试
根据在线光伏充电装置主拓扑(图1),研发了如图11 所示的实体样机。
图11 充电装置实物图Fig. 11 Photographs of charging device
为了验证基于变步长扰动逼近法的MPPT 算法跟踪的准确性以及其充电效率,本文对充电装置实物开展了现场测试工作,其在正常光照和遮光2 种情况下的测试结果如图12 所示,各包含15 组测试结果。图12 中:Iin为光伏板的输出电流;Vin为光伏板的输出电压;Pin为光伏板的输出功率;Iout为蓄电池的充电电流;Vout为蓄电池的充电电压;Pout为蓄电池的充电功率。
通过对比图12 的实测结果与图8 的仿真结果可知,虽然光伏板输出功率和蓄电池充电功率实测数据的波动相对较大,但仍然可以将误差保持在较小的范围内。现场测试结果表明,当光照条件发生变化时,该装置可以通过改变高频逆变器的占空比,从而实现MPPT 算法跟踪的功能,其整体充电效率可以保持在92%以上。

图12 充电装置的测试结果Fig. 12 Test results of charging device
6 结 语
针对传统光伏充电装置的典型拓扑及其优缺点,本文构建了移动式在线光伏充电装置拓扑,通过将高频逆变器与高频隔离变压器共同作为MPPT 载体,不但弥补了传统非隔离型光伏充电装置的电气隔离问题,还解决了传统隔离性光伏充电装置中级数多、效率受限等问题。基于此,本文提出了基于变步长扰动逼近法的MPPT 跟踪技术,仿真分析与现场测试结果表明,该在线光伏充电装置可以准确地实现MPPT 算法跟踪,同时,由于采纳了三段式充电方案,还能确保蓄电池快速、安全地充电。然而,该方案目前尚处于车载平台运行阶段,下一步拟开展实船移动平台测试工作。
