基于智能控制的船舶水动力导数敏感性分析方法
2021-08-31欧阳子路王鸿东王检耀易宏
欧阳子路,王鸿东*,2,王检耀,2,易宏,2
1 上海交通大学 海洋工程国家重点实验室,上海 200240
2 上海交通大学 海洋智能装备与系统教育部重点实验室,上海 200240
0 引 言
作为各种智能控制算法与控制策略实施的载体,智能船舶[1-2]与无人艇[3-5]这类结合了传统船舶工业与人工智能新兴技术的产物,已成为近年来学术研究的热点。而这些控制算法与策略的设计基础是船舶操纵运动数学模型。为了对智能船舶与无人艇的运动实现精准预报,一般需要采用非线性数学模型,如Abkowitz 模型[6]和MMG 模型[7],但这些数学模型包含大量的水动力导数,给控制算法与策略的设计与实施带来了问题:一是运算效率低,较高的模型复杂度会降低运算求解效率,减慢计算速度,带给计算机较大的存储压力与运行压力;二是物理意义不明确,较多参数难以从模型试验或计算流体动力学(CFD)求解中获取;三是参数漂移影响大,船舶操纵模型越复杂,水动力导数产生数值漂移的可能性越大,导致设计出的控制参数与控制律在实际工程中缺乏良好的适用性。
针对上述问题,国内外多位学者从敏感性分析(也称“灵敏度分析”)的角度对船舶操纵数学模型进行了简化。Hwang[8]将某水动力导数发生参数漂移后所引起的速度分量变化的最大值定义为该水动力导数的敏感性系数,并进行仿真试验验证了该方法的有效性。Perez 等[9]以船舶四自由度运动数学模型为基础,通过提取横向速度与角速度,定义了艏摇平方损失函数,该损失函数的计算值即为敏感性值。以该理论为基础,方向红等[10]以Mariner 船为研究对象,基于损失函数法对船舶运动数学模型进行了简化与重构;罗伟林等[11]考虑参数漂移效应,采用35°右回转、10°/10°Z 形操舵与20°/20° Z 形操舵这3 种操纵性标准试验进行灵敏度计算,并自行设计了目标函数,得出线性水动力导数、横向速度和转艏角速度的三阶水动力导数在模型中起主要作用的结论。徐峰等[12]直接从敏感性的原始定义出发,基于船舶操纵运动数学模型,推导出了敏感性分析的直接方法并针对简化前、后的15°/15° Z 形操舵进行了仿真试验,结果表明各运动状态吻合较好。
根据目前的研究进展,针对船舶操纵数学模型的敏感性研究多从单个标准操纵性试验(如Z 形操舵或回转试验)入手进行分析与验证,或是将多个标准操纵性试验的敏感性结果进行线性组合分析。然而,若要将控制算法与策略应用到船舶上,整个船舶操纵与运动过程相比其标准操纵性试验将会产生较大差异,且会衍生出带有控制特色的新指标,采用传统分析方法对用于智能控制的船舶运动数学模型进行简化,有可能会产生较大的实际控制误差。为此,在前人的研究基础上,本文拟提出结合标准操纵性试验与比例-积分-微分(proportion-integral-differential,PID)航向控制试验的敏感性分析方法,将控制指标、操纵性指标及整个时历过程典型运动状态变量平方损失进行复合分析,引入K-means 机器学习算法,对上述多维度敏感性指数进行聚类分析,从而得到用于智能控制的船舶运动简化数学模型,并用仿真试验对本文所提方法与模型的有效性进行验证。
1 船舶运动数学模型及操控试验
1.1 船舶运动数学模型
本文所采用的船舶运动数学模型为Abkowitz模型。该模型将船体、螺旋桨和舵看作一个整体,对3 个方向的流体动力作“准定常假设”,即F=f(u,v,r,u˙,v˙,r˙,δ),并将其展开为各运动状态量及其耦合项的泰勒级数之和,最终的数学表达形式如式(1)所示:
式中:m为船舶质量;XG为船舶重心的纵向坐标;Iz为船舶关于Z轴的惯性矩;u,v,r分别为纵向速度、横向速度及转艏角速度; Δu˙, Δv˙, Δr˙分别为纵向、横 向、转 艏 加 速 度 的 扰 动 项;Xu˙,Yv˙,Yr˙,Nv˙,Nr˙为流体惯性水动力导数;Δf1,Δf2,Δf3为作用于船舶的流体动力,包含一阶、二阶、三阶水动力导数。基于Abkowitz 模型,本文选取操纵性标模Mariner 进行研究。
1.2 船舶操控试验
本文采用标准操纵性试验结果与PID 航向控制试验结果相结合的分析方法,将控制指标、操纵性指标及整个时历过程典型运动状态变量平方损失进行复合分析。其中,标准操纵性试验包括回转试验与Z 型操舵试验。Mariner 船在标准水动力导数下的回转试验与20°/20° Z 形操舵试验结果分别如图1 和图2(图中, ψ为航向角,δ 为舵角)所示。对于回转试验结果,本文提取回转半径R、正横距S2和纵距S作为敏感性分析的关键指标;对于Z 形操舵试验,本文提取第一超越角ψOV作为关键指标,具体分析方法在下节展开。

图1 35°右满舵回转试验轨迹Fig. 1 35° right full rudder rotation test track

图2 20°/20° Z 形操舵试验舵角与艏向角时历曲线Fig. 2 Time history curves of rudder angle and heading angle in 20°/20° zig-zag test
PID 航向控制是船舶智能控制中应用最广泛的一种控制方法,同时,也是各智能控制算法与策略实施的基础,其执行流程如图3 所示。本文引入PID 航向控制试验作为敏感性分析的基础试验之一,可以有效测试与计算各水动力导数对控制过程及控制结果的影响程度。在PID 航向控制系统中,船舶期望航向角θ 与当前实际航向角ψ(t)这两者间的差值构成了航向偏差e(t),经过比例、积分、微分运算,可得到舵角实际输出u(t)的数学表达式为

图3 PID 航向控制执行流程Fig. 3 PID heading control execution process

式中:Kp为比例系数;Ti为积分时间常数;Td为微分时间常数。对于PID 控制试验结果,本文提取控制最大瞬态偏差d、控制误差err及u,v的时间序列作为敏感性分析的关键参数,具体分析方法将在下节展开。

式中: max(ψ(t))为整个控制过程中船舶最大航向角;ψ(final_t)为控制状态达到稳定最终时刻的船舶航向角。
2 敏感性分析方法
敏感性分析的核心目的是得到模型中各参数的敏感性系数大小,以便在实际应用中忽略敏感性系数很小的参数,重点考虑敏感性系数较大的参数,这样不仅可以大大降低模型的复杂度[13],还可减少因非线性水动力导数过多而带来的参数漂移[11]。本文将用于智能控制的船舶运动数学模型敏感性系数划分为3 个维度进行分析。
2.1 基于控制指标的敏感性系数
用控制指标R1表征船舶航向控制的特点。由1.2 节,可知R1包括d及err,且可以采用下面的函数表示:式中:H为水动力导数;O为船舶其他参数。基于R1,定义控制指标敏感性系数S1为

1) 在标准水动力导数下通过PID 航向试验计算d*与err*。
2) 取单个标准水动力导数,变化范围为-80%~+80%,变化步长为20%,每次变化后都通过PID航向控制试验计算相应的d j与err j。

4) 重复步骤2)与步骤3),遍历每一个水动力导数。
根据上述步骤,得到期望航向角θ= 20°时基于控制指标的敏感性系数S1如表1(根据式(1),流体惯性水动力导数及控制导数为建模必备参数,故未参与敏感性分析)所示。

表1 水动力导数基于控制指标的敏感性系数Table 1 Sensitivity coefficients of hydrodynamic derivatives based on control index
2.2 基于复合评价函数的控制过程敏感性系数
除了对航向控制典型指标的分析,在整个航向控制过程中,各运动状态的时历演变同样重要,因其反映的是系统的动态性能。基于Perez等[9]提出的损失函数概念,针对PID 航向控制的特殊性,定义复合评价函数Jcontrol如式(6)所示。

式中:psi*为标准水动力导数下船舶航向角在整个控制过程时间序列上构成的向量,其维数为N*1;psi j为水动力导数偏移后的向量。该式计算的是两向量的夹角余弦,机器学习及统计学经常采用该值来衡量样本向量之间的相似程度。本文借助该数学概念,考虑到 |1-η|在本场景数值上较小,采用sigmoid 函数对其进行了放大激活。PID航向控制的动态性能对某水动力导数的变化越敏感,psi*与psi j间的差异便越大,sigmoid(|1-η|)的值将越大。综上可知,式(7)综合考量了纵向速度、横向速度与航向角的动态性能关于水动力导数的敏感性。基于上述数学分析,得到期望航向角θ= 20°、单水动力导数偏移50%时的敏感性系数S2如表2 所示。
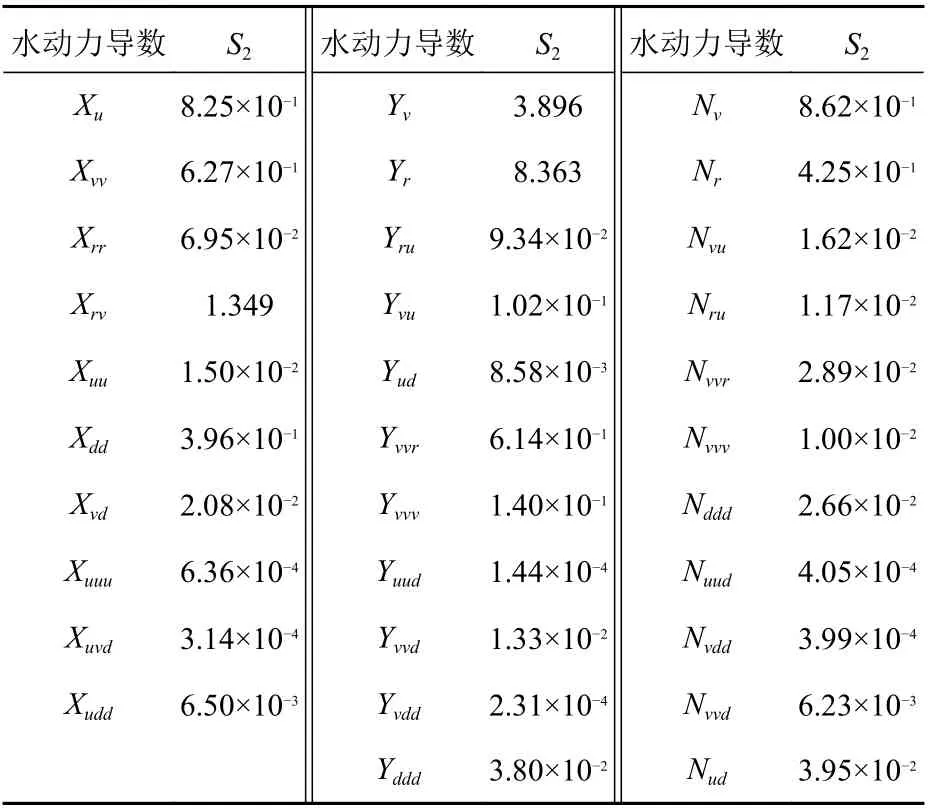
表2 水动力导数基于复合评价函数的控制过程敏感性系数Table 2 Sensitivity coefficients of hydrodynamic derivatives based on composite evaluation function of the control process
2.3 基 于 标 准 操 纵 性 试 验 指 标 的 敏 感 性系数
2.1 节和2.2 节分别对PID 航向控制结果与动态性能这2 个维度的水动力导数敏感性进行了分析,主要关注的是水动力导数变化对控制性能的影响。本节则回归标准操纵性试验,如回转试验与Z 形操舵试验,分析水动力导数变化对航行性能的影响。
用标准操纵性试验指标R3表征船舶航行性能的特点,由1.2 节,R3包括R,S2,S,ψOV。类似于2.1 节,基于R3定义标准操纵性试验指标S3如式(8)。

表3 水动力导数基于标准操纵性试验指标的敏感性系数Table 3 Sensitivity coefficients of hydrodynamic derivatives based on standard maneuverability test index
3 基于多维敏感性数据集的水动力导数聚类分析与仿真验证
由上节,得到了从不同维度出发描述水动力导数的敏感性系数S1,S2,S3,即每个水动力导数对应3 个敏感性系数。根据以上数据,得到水动力导数在构造用于智能控制的运动数学模型时关于敏感性高低的类别划分,并采用机器学习K-Means聚类算法进行了分析。
聚类是将一个大的数据集划分为具有相似特征或表现的若干子集。与分类不同,聚类无需事先得到数据集中某些数据的分类标号,从部分标签中提取分类原则,而是秉持子集与子集之间数据差异程度最大、同一子集里的数据差异程度最小的原则来对大数据集进行划分。因此,该思想与方法非常适合本文多维且无对运动数学模型影响权重大小标签的敏感性数据集。
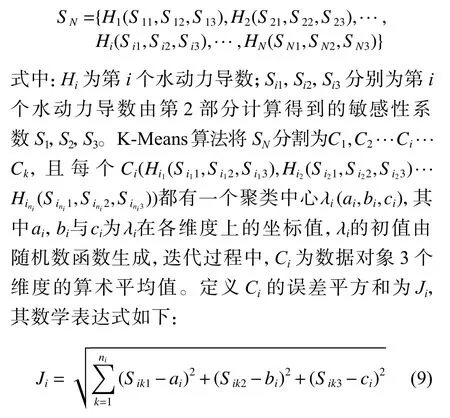
在聚类算法中,K-Means 算法是实际应用中使用最广泛的一种算法[14],该算法由MacQueen[15]于1967 年率先提出,其核心思想为把某数据集中N个数据对象,以“每个聚类中的数据对象到该聚类中心的误差平方和最小”的思想为基础,划分为k个聚类。具体到本文,对于包含N个(N为参与敏感性分析的水动力导数数目)三维数据点的敏感性数据集SN:
在以上数学定义的基础上,基于多维度敏感性系数的K-Means 水动力导数聚类分析算法的实施步骤如图4 所示。

图4 K-means 聚类分析算法实施步骤Fig. 4 Implementation steps of K-means cluster analysis algorithm
根据图4 所示运行算法,得到基于多维度敏感性系数的水动力导数聚类分析结果如表4 所示,表中A,B,C 为水动力导数聚类标签。表5 所示为各聚类中心与原点之间的欧氏距离。

表4 基于多维度敏感性系数的水动力导数聚类分析结果Table 4 Cluster analysis results of hydrodynamic derivatives based on multi-dimensional sensitivity coefficient

表5 各聚类中心与原点之间的欧氏距离Table 5 Euclidean distance between cluster centers and origin
根据聚类结果,Yv,Yr,Nv,Nr这4 个一阶位置导数与旋转导数属于同一聚类A,且A 类的聚类中心与原点间的欧氏距离值最大。显然,A 聚类中的数据对象是聚类算法根据三维敏感性系数,判断在构造用于智能控制的运动数学模型时影响权重最大的水动力导数,这些导数在建模时是不能忽略的。Nvvv,Nvvd等20 余个水动力导数属于同一聚类C,且C 类的聚类中心与原点间的欧氏距离值最小。显然,C 聚类中的数据对象是用于控制建模时影响权重最小的水动力导数,这些导数在控制建模时可以忽略,且在模型试验中也不必对它们进行测试计算。Xu,Xrv,Yvvr,Nvvr属聚类B,其影响权重被聚类算法自动划分为A,C 之外,且B 类的聚类中心与原点间的欧氏距离值介于A,C 之间,表明B 所包含的对象对构造用于智能控制的运动数学模型的影响介于二者之间,为保证控制算法与策略设计时的精度,应对这些导数给予测试与计算。
只考虑聚类A,B 的水动力导数,即可得到本文所提的简化模型,记为Model A。除流体惯性力项与一阶控制导数项外,Model A 包含的水动力导数有8 个:Yv,Yr,Nv,Nr,Xu,Xrv,Yvvr,Nvvr,相比完整模型(记为Model),已得到很大的简化。同时,为了验证Model A 在用于智能控制时的有效性与优越性,引入徐峰等[12]于2013 年提出的简化模型(记为Model B)进行了对比。Model B 是由标准操纵性仿真试验经分析与计算得到,该模型包含的水动力导数有7 个:Yv,Yr,Nv,Nr,Xu,Xrv,Xδδ。本文 中Model A 与Model B 的 主要区 别 在于,认为三阶水动力导数项Yvvr与Nvvr在船舶智能控制时对控制过程与结果的影响不可忽略,二阶水动力导数Xδδ的作用不明显。
针对Model,Model A 与Model B,在相同控制参数及相同初始运动状态下做PID 航向控制仿真试验,其中Model 与Model A 表现出的实际航行轨迹如图5 所示,3 个模型在控制过程中其航向角输出、转艏角速度r、纵向摄动速度u与横向速度v的时历曲线如图6 所示。
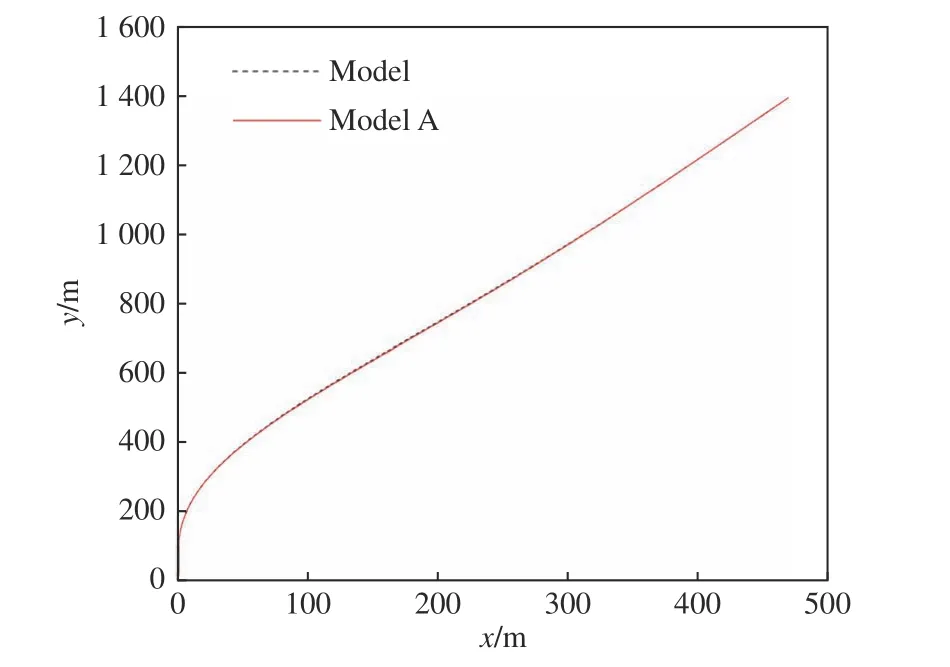
图5 Model 与Model A 的PID 航向控制试验航行轨迹Fig. 5 PID heading control experimental trajectory of Model and Model A
由图5 可知,本文所提Model A 在PID 控制下所表现出的实际航行轨迹与完整模型Model 吻合较好,表明从最终的控制结果来看,本文所提模型具有较好的精度与工程实用价值。由图6 可知,除纵向摄动速度u外,相比Model B,本文所提Model A 与完整模型的变化趋势在航向角输出、转艏角速度r和横向速度v方面更加贴合,尤其是在曲线的高、低峰值上,Model B 表现出了较大的状态漂移,而Model A 则几乎与完整模型的数值一致。这表明了本文所提敏感性分析与聚类分析方法的有效性,尤其是引入基于控制指标的敏感性系数与基于复合评价函数的控制过程敏感性系数后,在控制结果与控制过程上对水动力导数进行多维敏感性计算与评价,使得Model A 在进行操控运动预报时具有更好的准确度。

图6 Model,Model A,Model B 各物理量的时历曲线对比Fig. 6 Comparison of time history curves of physical quantity with Model, Model A and Model B
从Model A 与Model B 的差异角度出发,本文的结果还表明,在控制方面,某些三阶水动力导数的影响权重不仅不弱于,甚至是强于二阶水动力导数。例如,Model B 所考虑的二阶水动力导数Xδδ尽管其敏感性系数S2的数值(3.96×10-1)比本文所提的需要考虑的三阶水动力导数Nvvr相应的数值(2.89×10-2)大,但Xδδ的S1(5.00×10-3)与S3(2.22×10-1)均远小于Nvvr相应的数值(1.45×10-1与1.806),因此,本文聚类算法通过综合判断分析,将Xδδ划分到了建模可以忽略的聚类C。仿真试验结果也表明,忽略Xδδ仅轻微影响到了纵向速度的精度,对航向控制输出无较大影响。由此可以看出,本文所提多维敏感性分析方法具有全面性与优越性。
为进一步考察船舶在执行路径跟踪这类复杂的控制任务时,Model A 对运动过程的预报精准度是否满足工程需求,开展了基于间接航迹控制策略的路径跟踪仿真对比试验。外环航迹控制环均采用视线(LOS)制导法,中环航向控制环均采用PID 控制算法,跟踪的路径点如表6 所示。基于Model,Model A 和Model B 这3 种模型对船舶操控运动进行预报,得到航行轨迹与航向角时历曲线分别如图7、图8 所示。

图8 航向角时历曲线对比Fig. 8 Comparison of time history curves of heading angle
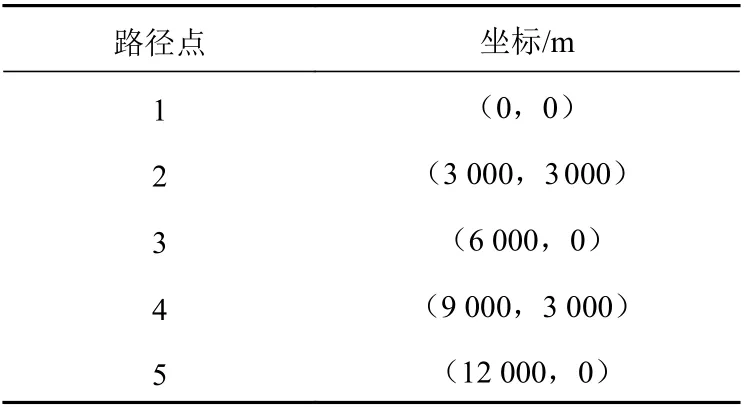
表6 路径跟踪点Table 6 Path tracking point
从航向角时历曲线上看,在0~550 s 时间区间内,Model A 与Model B 这2 个简化模型与完整模型几乎完全贴合,但是由于Model A 与Model B均在建模中忽略了大量二阶与三阶水动力导数,导致在550~800 s,1 200~1 600 s 和1 880~2 100 s这3 个区间内,简化模型与完整模型的差异开始体现,主要表现在高、低峰值的大小与时滞上。这3 个时间区间对应的是船舶操舵转艏和航行通过图中3 个设定的“拐点”的过程。该现象表明:简化模型舍弃高阶水动力导数后,对船舶航行状态预报结果的影响主要体现在较为激烈的转艏动作上。从实际航行轨迹结果上看,Model A 模型预报的航行轨迹相比Model B 更贴近完整模型Model,尤其是在激烈操舵的航迹段切换过程中,如图7 中局部放大图,Model B 表现出了较大的船位“漂移”(这里的“漂移”是指与完整模型Model 轨迹之间的差异,而非与预设路径之间的跟踪误差),而Model A 则几乎与完整模型一致。这表明本文所提Model A 模型在平稳循迹的稳定状态与激烈操纵的大舵角转向状态均具有更好的预报精度。
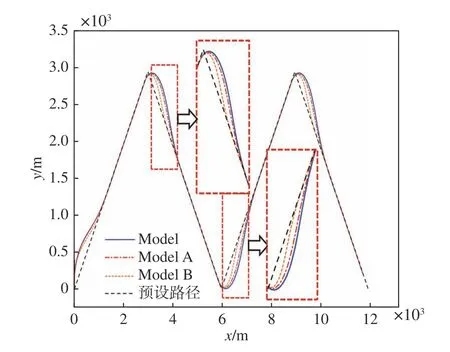
图7 Model,Model A 与Model B 的路径跟踪航行轨迹Fig. 7 Path tracking experimental trajectory of Model , Model A and Model B
4 结 语
为了获得用于智能控制的船舶运动简化数学模型,本文提出结合标准操纵性试验与PID 航向控制试验的敏感性分析方法,将控制指标、操纵性指标及整个时历过程典型运动状态变量平方损失进行复合分析,得到了包含基于控制指标的敏感性系数S1、基于复合评价函数的控制过程敏感性系数S2及基于标准操纵性试验指标的敏感性系数S3的数据集,通过引入K-means 机器学习算法对上述多维度敏感性指数进行聚类分析,完成了水动力导数敏感性强弱的自动划分,进而对模型进行了简化。通过比较本文简化模型、前人简化模型和完整模型的PID 航向控制试验与路径跟踪试验仿真试验结果,验证了本文所提敏感性分析方法的有效性,证明本文所提模型具有更高的操控预报精度。未来,可进一步探究在不同海洋环境载荷下简化模型的建立。
