大飞机空速异常辅助决策功能空速构建方法研究
2021-08-30吴佳驹苏幸君朱妍
吴佳驹,苏幸君,朱妍
(1.航空工业第一飞机设计研究院总体设计研究所,西安710089)
(2.中国飞行试验研究院技术中心航电所,西安710089)
0 引 言
空速是飞行员重点关注的飞行参数之一,空速异常通常会引起较为严重的飞行事故,并且难以通过地面检查完全排除该故障。自20世纪90年代以来,因空速异常引发的大飞机事故多达十数起,轻则导致飞机返航,重则导致飞机坠毁。
当空速异常发生时,主要依赖飞行员进行危险状态改出操作,然而空速异常多伴随着相关系统的异常,短时间内会触发大量告警信号,致使飞行员工作负荷剧增;同时,在复杂且多变的飞行环境下,受到人体生理和心理承受能力的限制,飞行员决策的正确性也将受到影响。
国外主要在传感器正常状态下,开展了空速气动补偿方法研究,以获取更准确的修正空速值。国内主要在飞机过失速状态下,开展了大气数据融合方法研究,以提供可靠的大气参数状态反馈。
国内外针对传感器故障时的飞行员辅助方法研究较少。因此,本文设计大飞机空速异常辅助决策功能空速构建方法,在空速异常时,将协助飞行员完成快速正确地操纵,提高飞机的生存率。
1 空速异常辅助决策功能
1.1 功能定义
当飞机发生空速异常时,电子化显示操纵流程,综合利用机载系统状态信号和传感器信号,辅助飞行员进行异常信号判断,并给出安全飞行操纵提示,保障飞行安全。
1.2 功能原理
大飞机空速异常辅助决策功能包括人机交互界面设计和空速构建方法研究,功能原理如图1所示。本文重点研究空速构建方法。
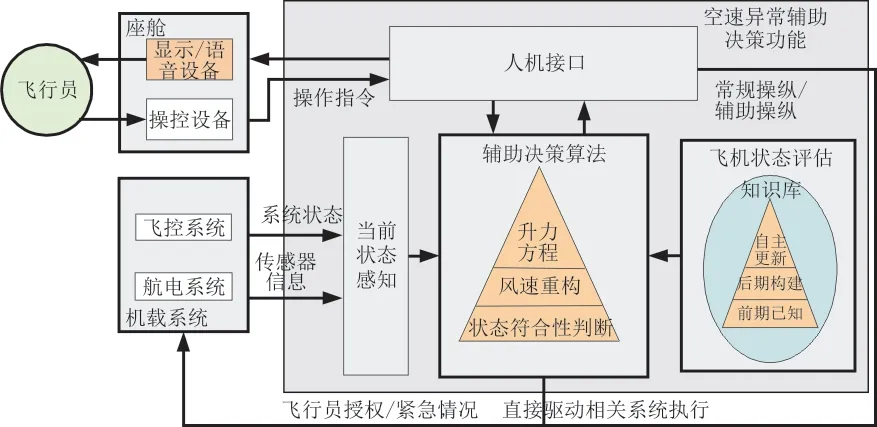
图1 空速异常辅助决策功能原理Fig.1 Principle of airspeed anomalies auxiliary decision-making function
人机交互界面设计:基于快速检查单的内容和重构的空速,以电子条目化的形式显示由飞行员确认的辅助内容,供飞行员在紧张时间压力下快速参考,完成故障改出操纵,界面如图2所示。
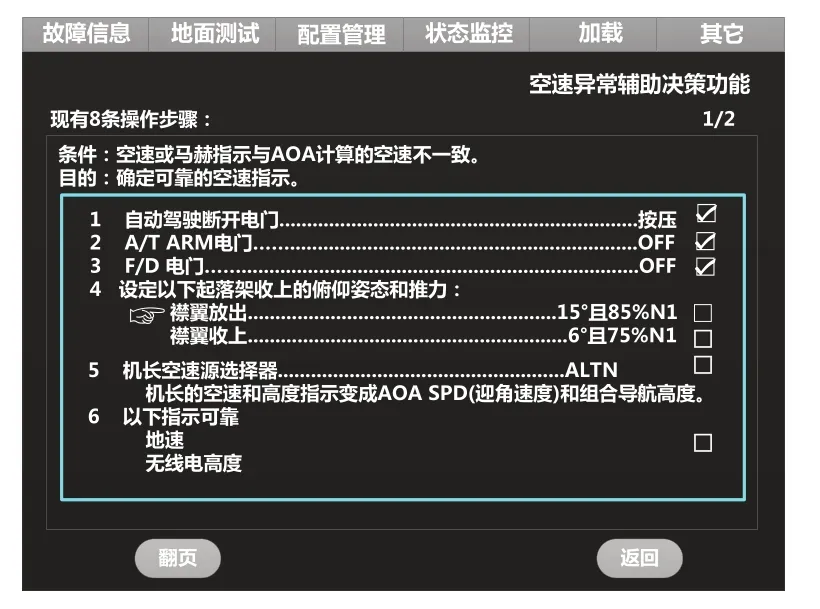
图2 电子条目化界面设计Fig.2 Design of electronic itemization display
空速构建方法研究:基于不同的飞行阶段和飞机性能,通过升力方程、风速重构、飞行状态符合性判断方法,确定当前真实的空速,辅助飞行员操纵。
2 空速构建方法
飞机指示空速来自大气数据系统,一般情况下,大飞机配备三套大气数据系统:一套将数据给主驾送显,一套给副驾送显,还有一套作为备份。
以三套大气系统为例,传感器故障包括非共模故障和共模故障两类。当发生非共模故障时,传感器的信号值一致;当发生共模故障时,传感器的信号值一致,余度表决无法识别。
空速信号的综合判断流程如图3所示。
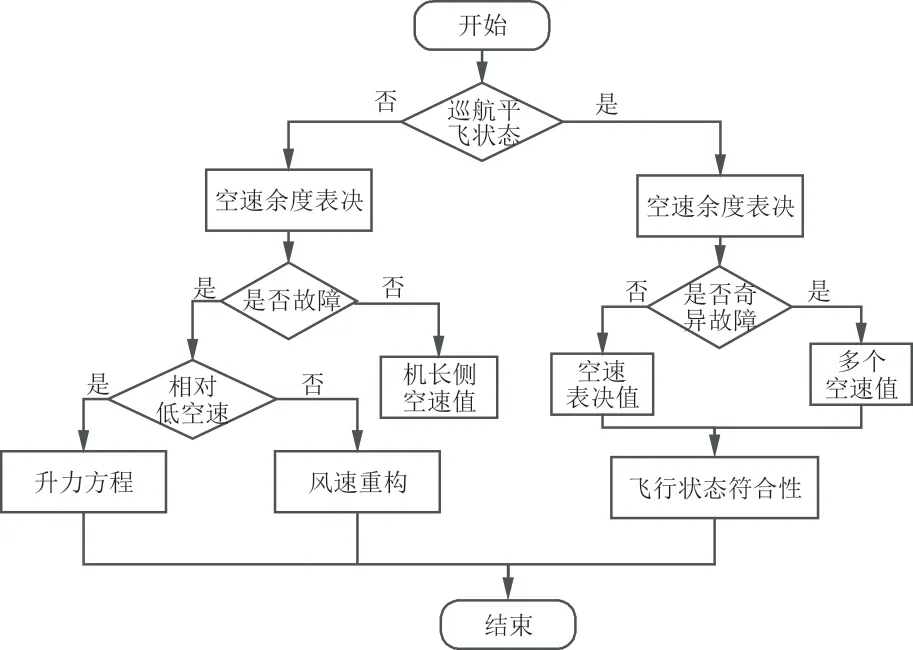
图3 信号综合判断流程Fig.3 Comprehensive judgment process of signals
当大飞机处于非巡航平飞状态,对采集的空速信号进行余度表决,判断信号的正确性。如果信号正确,则三套大气数据系统工作正常,继续使用机长侧的空速值作为当前的真实空速;如果信号故障,在相对低的速度的飞行包线中,采用升力方程重构空速,否则采用风速重构空速。
当三套大气传感器发生共模故障,余度表决方法将无法识别故障,左侧算法将采用机长侧的错误空速值,引发飞行安全问题。针对该情况,在大飞机巡航平飞状态时,无论故障是否为共模故障,均可通过飞行状态符合性方法识别故障信号,给出真实空速,辅助飞行员完成危险状态改出。
升力方程、风速重构、飞行状态符合性等空速构建方法将在下文进行详述。
2.1 余度表决
以大运飞机为例,将三套大气机解算的空速信号按由大到小的顺序排队,通过两两信号的差值判断信号状态,可能的状态如表1所示。

表1 空速信号余度表决Table 1 Airspeed signal redundancy voting
当传感器设备出现非共模故障时,通过余度表决,可以判断信号是否正确。当传感器设备出现共模故障时,三套大气机的数值会出现同等突变,余度表决将无法识别出故障数值。此时,如果飞机处于巡航平飞状态时,将自动通过2.4节的“飞行状态符合性判断”方法识别出真实的空速。
2.2 基于升力方程重构空速
由于空速管暴露在外部环境中,并且会被能够部分或全部堵塞传感器的物质干扰,产生错误的压力测量值,开发独立于空速管估计空速的替代方法是有必要的。
(1)升力方程原理
在相对低的速度的飞行包线中,使用升力方程较为准确。升力方程与垂直负载因素、迎角、质量和速度参数有关,通过迎角、垂直负载因素和质量可以重构实时的等效速度。升力方程的公式为

n
为垂直负载因数;m
为飞机的质量;g
为重力加速度;S
为参考面积;C
为升力的气动力系数的梯度;α
为迎角;α
为零升力迎角;q
为动压。
ρ
为空气密度;v
为飞行速度(真空速)。联立式(1)~式(2),可得空速为

空气密度为

P
为当地大气压;P
为标准物理气压;T
为实际绝对温度。
T
为摄氏温度。
T
为H
点的摄氏温度;T
为对流层参考点的温度;H
为与参考点的相对高度差。当地大气压为

H
为气压高度。输入信号及其来源如表2所示。
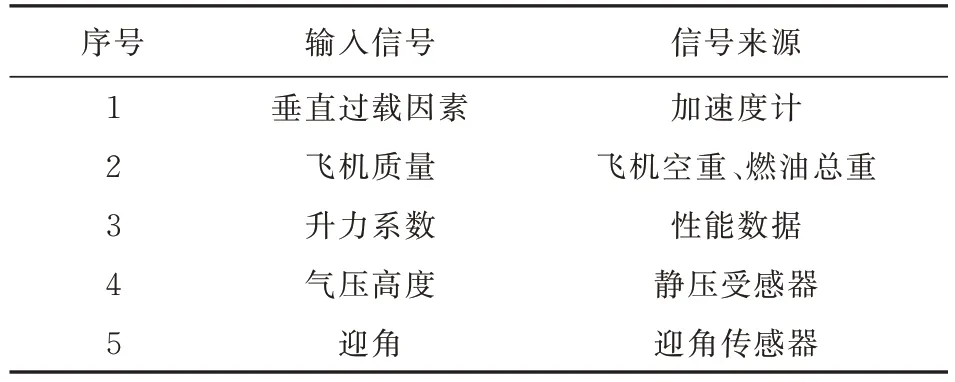
表2 输入信号及其来源Table 2 Input signals and their sources
在相对低的速度飞行时,在适当的迎角范围内,大飞机的升力系数与迎角基本呈线性关系。本文将使用最小二乘法进行升力系数的曲线拟合,算法原理为:
设 (x
,y
)是 一 对 观 测 量 ,且x
=[x
,x
,…,x
]∈R
,满足以下理论函数:

f
(x
,w
)的参数w
的最优估计值,对于给定m
组(通常m
>n
)观测数据(x
,y
)(i
=1,2,…,m
),求解目标函数
w
(i
=1,2,…,m
)。对于无约束最优化问题,最小二乘法的一般形式为

L
(x
)(i
=1,2,…,m
),为残差函数。对于未定型的大飞机,在典型的马赫数和典型的迎角下,进行风洞试验,得到典型状态点的升力系数,并对试验得到的升力系数进行曲线拟合,从而得到迎角、马赫数全包线下的升力系数。通过实时计算升力系数,可代替飞行员手动查阅性能手册。对于已定型的大飞机,性能数据准确、充实,可直接选取升力系数进行计算。
以大运飞机为例,当速度为0.2Ma
时,基于15组不同迎角下的升力系数值,使用最小二乘法依次进行1~9次的曲线拟合,如图4所示,可以看出:在相对低的速度飞行时,大飞机的升力系数与迎角近似为线性关系。
图4 大飞机升力系数的曲线拟合Fig.4 Curve fitting of lift coefficient of large aircraft
(2)仿真验证
在面积S
=486 m,g
=9.81 m/s下,选取5组典型点,进行算法可靠性验证。例1,取配平点1的状态参数为:m
=143 000 kg,H
=1000 m,α
=13.133 9°。计算得升力系数为1.159 7,空气密度为1.077 kg/m,飞行速度为66.31 m/s。通过升力方程计算的平衡点速度为67.28 m/s,误差值0.97 m/s,误差百分比1.44%。
例2,取配平点2的状态参数为:m
=143 000 kg,H
=1000 m,α
=5.225 0°。计算得升力系数为0.520 4,空气密度为1.077 kg/m,飞行速度为101.49 m/s,平衡点速度为100.92 m/s,误 差 值0.57 m/s,误 差 百 分 比0.56%。
例3,取配平点3的状态参数为:m
=160 000 kg,H
=1 000 m,α
=14.973 7°。计算得升力系数为1.281 8,空气密度为1.077 kg/m,飞行速度为68.40 m/s,平衡点速度为67.28 m/s,误差值1.12 m/s,误差百分比1.66%。
例4,取配平点4的状态参数为:m
=143 000 kg,H
=3 000 m,α
=6.929 9°。计算得升力系数为0.662 8,空气密度为0.879 kg/m,飞行速度为99.57 m/s,平衡点速度为98.58 m/s,误差值0.99 m/s,误差百分比1.01%。
例5,取配平点5的状态参数为:m
=143 000 kg,H
=8 000 m,α
=0.942 1°。计算得升力系数为0.162 8,空气密度为0.560 kg/m,飞行速度为251.60 m/s,平衡点速度为242.09 m/s,误 差 值9.51m/s,误 差 百 分 比3.93%。
由仿真结果可知,通过升力方程重构的马赫数,在大飞机0.8Ma
速度内,可用于空速的重构,结果较为准确。2.3 基于风速重构空速
在相对高的速度的飞行包线中,升力方程将不准确。此时,需通过风速重构空速,算法原理如图5所示。

图5 通过风速重构空速原理Fig.5 Principle of airspeed reconstruction through wind speed
当空速正常时,通过地速和真空速实时计算风速,存入风速数据库;当空速异常时,由于风速传感器可能出现故障,需要判断风速传感器的信号是否正确。基于经验选取风速数据库中近八拍的风速平均值,与当前风速传感器值进行对比,若误差小于风速平均值的5%,则传感器正常,可以使用风速传感器值。
由风速和故障时刻的地速计算真空速,结合当前飞行高度、温度信号,确定真实的指示空速,供飞行员进行故障状态改出。各信号及其来源如表3所示。
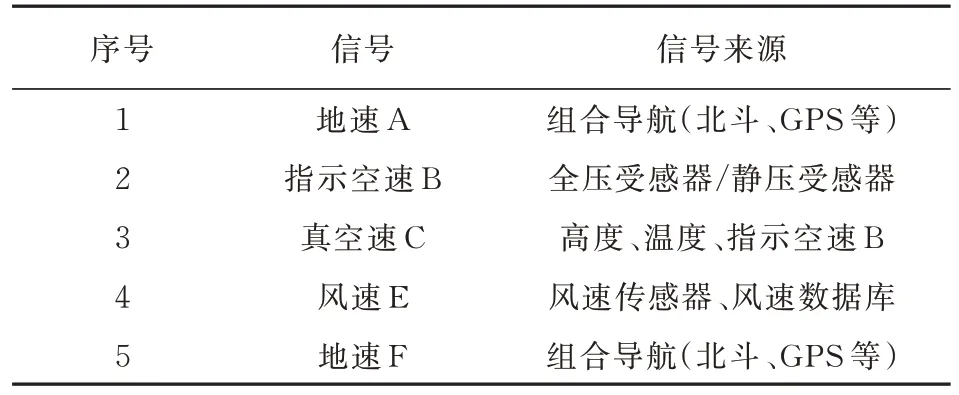
表3 信号及其来源T able 3 Signals and their sources
(1)风速计算原理
飞机风速的计算公式为
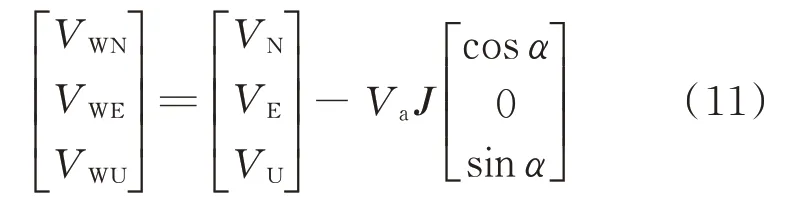
V
为北向风速;V
为东向风速;V
为天向风速;V
为北向速度;V
为东向速度;V
为天向速度;V
为真空速;α
为真攻角;J
为机体坐标系到地理坐标系的转换矩阵。J
的计算公式为
θ
为俯仰角;ψ
为真航向角;γ
为横滚角。风速V
计算公式为
ψ
计算公式为
风向为风速矢量与正北的夹角,以正北为基准顺时针为正。
在仿真时,大气扰动使用大气紊流的Dryden模型,速度自功率谱函数如下:
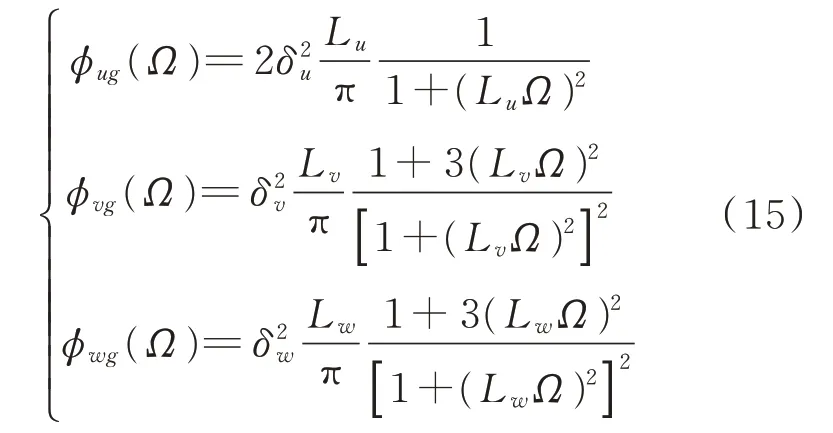
ϕ
(Ω
)为水平前向风;ϕ
(Ω
)为侧向风;ϕ
(Ω
)为垂直风;Ω
为空间频率;L
,L
,L
为紊流尺度;δ
,δ
,δ
为风速的均方值。(2)仿真验证
在飞机总质量143 000 kg,重心0.260 7,高度1 000 m,马赫数0.3,襟翼收起,起落架放下,真空速100.92 m/s,迎角5.225°,侧滑角-4.114 1°,油门开度10.68°的平衡状态下,开展试验。
仿真总时长200拍,每拍0.02 s,在仿真0.2 s时,加入大气紊流,紊流尺度533.4 m,翼展60 m,仿真结果如图6所示。

图6 加入大气紊流的仿真结果Fig.6 Simulation results of atmospheric turbulence
从图6可以看出:对于小幅度的大气紊流,自动飞控可完成飞行状态调节,且在0.2 s空速异常时刻,通过风速可重构出正确的空速101.41 m/s。
2.4 飞行状态符合性判断
在大飞机的飞行剖面中,巡航阶段占据多数时间。基于大飞机的平衡状态点,构造平衡状态点知识库。当在巡航阶段平飞时,从知识库中选取空速,与余度表决的空速值对比,如果差值大于临界值,将进行不匹配告警,并建议切换到人工模式进行安全控制。临界值的设定来源于外场飞机飞参数据。目前,临界值选取为余度表决值的10%,随着试飞验证,临界值将不断完善。算法原理如图7所示。

图7 飞行状态符合性判断算法原理Fig.7 Principle of the algorithm for judging compliance of flight state
大飞机纵向力和力矩平衡方程为
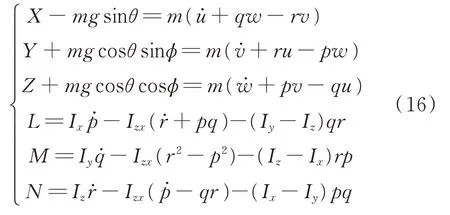
X
,Y
,Z
分别为体轴坐标系下x
,y
,z
轴方向飞机所受的合力;L
,M
,N
分别为体轴坐标系下x
,y
,z
轴方向飞机所受的力矩。(1)平衡状态分析
在飞行包线范围内,选取大飞机的平衡点。在总质量143 000 kg,重心0.260 7,襟翼收起,起落架放下的条件下,给出50组不同高度、速度、迎角下的状态初值,进行批处理,得到相应的状态平衡点。
对状态平衡点的高度、真空速、迎角、升降舵偏角、油门杆参数进行归一化处理后,进行多元线性回归分析,得到回归模型以构建平衡状态点知识库。以二元线性模型为例,回归模型为

类似的使用最小二乘法进行参数估计:
F
统计量值为679.294,F
校验的p
值为0,误差方差为0.000 7。由计算结果可知,相关系数接近1,回归性好,检验的p
值<0.01,拟合模型有效。绘制试验状态点的高度、迎角、真空速值,如图8所示,可以看出:与计算结果相吻合。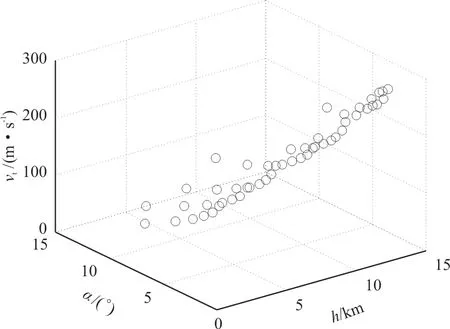
图8 多元线性回归分析Fig.8 Multivariate linear regression analysis
在飞行包线内,自变量为高度、真空速、迎角、升降舵侧滑角、油门开度参数,构建真空速知识库。试验状态点的预估真空速与模型仿真的真空速的差值如图9所示。

图9 预估真空速差值Fig.9 Estimated true speed difference
从图9可以看出:预估真空速差值的最大值为13.53 m/s,最小为-14.82 m/s,以模型仿真的真空速为基准,计算真空速差值百分比,最大为7.06%,在误差范围8%以内,平衡状态点知识库可以作为重构空速的来源。
(2)仿真验证
在 总 质 量143 000 kg,重 心0.260 7,高 度1 000 m,马赫数0.3,襟翼收起,起落架放下,真空速100.92 m/s,迎角5.225°,侧滑角-4.114 1°,油门开度10.68°的平衡状态下,开展试验。仿真总时长200拍,每拍0.02 s,在仿真0.2 s时,注入空速共模故障和高度共模故障,飞行高度增加50 m,真空速增加0.05Ma
,仿真结果如图10所示。
图10 空速异常仿真结果Fig.10 Simulation results of airspeed anomalies
从图10可以看出:飞机将进入新的平衡点,参数为:高度1 050 m,真空速117.7 m/s,迎角3.604°,侧滑角-3.027°,油门开度11.49°;通过知识库计算的真空速为119.28 m/s,与仿真的真空速误差为1.34%,可作为巡航阶段平飞状态的空速重构值。
3 结 论
(1)针对传感器故障时飞行员辅助方法研究较少的问题,本文设计了大飞机空速异常辅助决策功能空速构建方法。通过余度表决判断算法、飞行状态符合性判断算法、基于风速的空速构建算法和基于升力方程的空速构建方法,可有效识别空速故障信号,并构建真实的空速值,辅助飞行员完成故障改出操纵。
(2)考虑到模型和算法的数学本质,本文提出的空速异常辅助决策功能空速构建方法同样可用于其他大飞机。
