无人机飞行有效载荷计算与载荷平台研究
2021-08-30董一巍钱华敏叶倩雯郭翔尤延铖王尔泰
董一巍,钱华敏,叶倩雯,郭翔,尤延铖,王尔泰
(1.厦门大学 航空航天学院,厦门361005)
(2.厦门大学 深圳研究院,深圳518000)
(3.同济大学 航空航天与力学学院,上海200092)
0 引 言
在飞行器领域,高速无人机由于其独特的长航时、高机动性、低成本、短周期等任务特点与研发特性逐渐得到广泛关注。飞行载荷是高速无人机结构在巡航工况下主要承载的外力。在无人机结构设计与校核时需要对飞行载荷预先进行计算与分析,以确保无人机结构设计合理而不冗余。载荷计算平台是对飞行载荷进行计算与处理的计算机语言程序,是高速无人机研发过程中必须开发的软件之一。在传统载人飞机的载荷设计中,在方案设计和初步设计阶段,按照工程方法和设计经验进行载荷预计;在详细初步设计阶段,采用风洞试验对测点进行压力测量,再根据积分得到整机载荷分布;后续载荷平台编写也必须适配风洞试验得到载荷格式与插值方法。这种研发流程不适应无人机的研制要求:一方面无人机设计具有“低成本、短周期”的特点,而风洞试验“耗时长、成本高”;另一方面无人机研发新概念层出不穷,传统工程方法和设计经验不适用。随着计算流体力学原理与假设不断完善、计算机计算能力日益提高,通过计算流体力学(CFD)仿真飞行载荷的方法逐渐得到广泛关注。
在飞行载荷计算领域,FAR23通过平衡载荷确定每个部件的结构临界载荷,从而计算空气载荷、惯性载荷、净载荷和着陆载荷。T.Iwasa等建立了估算V型带夹分离激波飞行极限载荷的简化计算方法,增加了一个适当的包线裕度来估算飞行极限载荷;张辉通过引入CFD计算结果,实现对线性方法中的气动力影响系数矩阵的非线性修正,采用模态法求解静气弹配平方程得到飞机非线性的飞行载荷;谭林林等基于改进的组合包线法对某型民用飞机总载荷进行筛选;马凯超等针对舰载运输机副翼飞行载荷计算方法进行研究,得到设计载荷下的机动工况;彭小忠等对飞行载荷临界筛选方法的优劣进行了比较;邓立东等提出一种满足其型号要求的飞行载荷设计流程,但是没有进一步给出载荷算法;彭小忠等针对大型运输机的惯性载荷与气动载荷,给出了不同翼型剖面下理论计算方法与结果;孙本华开发了一种针对军用飞机飞行载荷的计算软件,并通过数据分析验证了其可靠性;刘毅提出了一种民用飞机平尾的飞行载荷计算方法。总体上看,目前针对飞行载荷的计算方法主要基于风洞插值输入与理论计算,而基于新兴计算流体力学方法计算飞行载荷的研究非常少;载荷平台开发研究主要基于平台计算流程与方法,缺乏完整的开发要求与载荷平台架构实例搭建。
根据飞行载荷研究背景与现状分析,本文提出一种通过计算流体力学仿真得到的飞行载荷计算方法,该方法主要针对飞行器初步设计阶段,考虑大机动下惯性载荷影响,以流体网格作为计算单元,将飞行器近似视作梁结构,筛选标准为飞行器及机翼的内弯矩与剪力;基于该方法建立载荷平台的完整开发流程,并已应用于某型高速无人机设计实践中。
1 载荷计算方法
飞行载荷根据受载原因,可以分为由升力产生的气动载荷与由机动动作产生的惯性载荷,二者相互独立,可进行叠加计算。考虑到计算单元远小于飞行器尺寸,为降低计算复杂度并提高计算效率,作出以下假设:
(1)忽略网格曲率,近似认为网格是由端点构成的多边形平面;
(2)假定单个网格质量均匀分布;
(3)将网格气动载荷与惯性载荷的分布力近似认为作用于网格质心的集中力。
1.1 气动载荷计算
气动载荷计算单元采用三角形网格单元。某型飞行器的气动网格单元如图1所示。
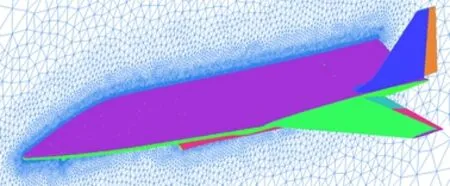
图1 算例三角形网格单元示意图Fig.1 A triangle grid cell diagram for case study
调用给定气动工况下对应气动数据库。将单个网格标记为Mash,依次标记其顶点分别为Point,Point,Point,分别记其坐标为(
x
,y
,z
),(x
,y
,z
),(x
,y
,z
),其 压 强 数 据 分 别 为P
,P
,P
。基于计算假设,根据几何关系,可以对该网格面积S
与网格等效作用点(x
,y
,z
)加以计算,如式(1)~式(2)所示。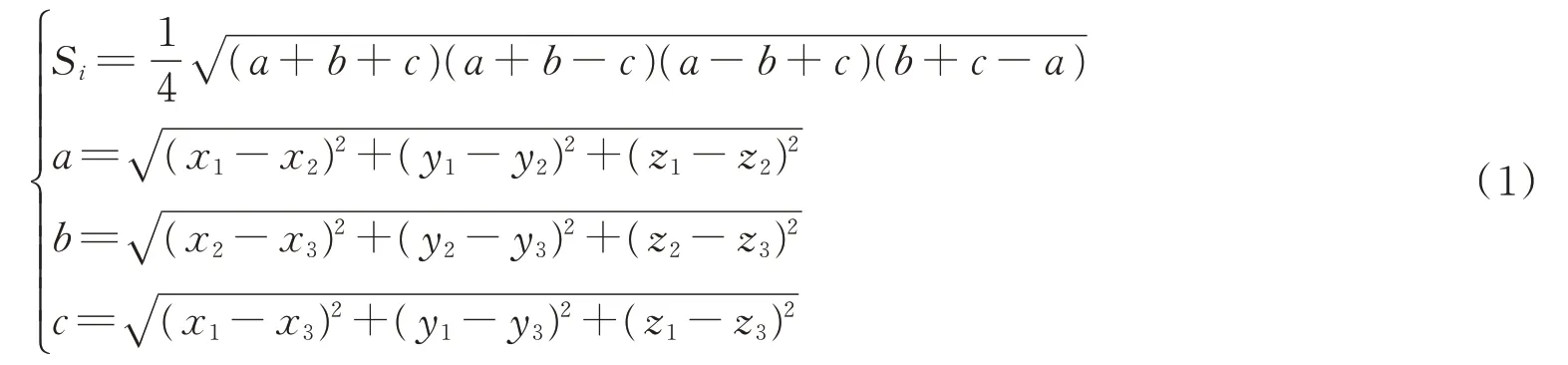
P
通过节点距离加权反比方式确定,计算方法如式(3)所示。
w
为权函数;L
为距离函数。根据压强定义,网格气动力方向与平面法向量方向一致,平面法向量n
可由式(4)表示。
F
为网格气动力,其大小可由式(5)求得。
P
为环境压强。1.2 惯性载荷计算
根据达郎贝尔原理,提出一种网格惯性载荷计算方法,分别对线加速度、切向加速度与法向加速度进行解析,并计算投影到坐标轴的结果。
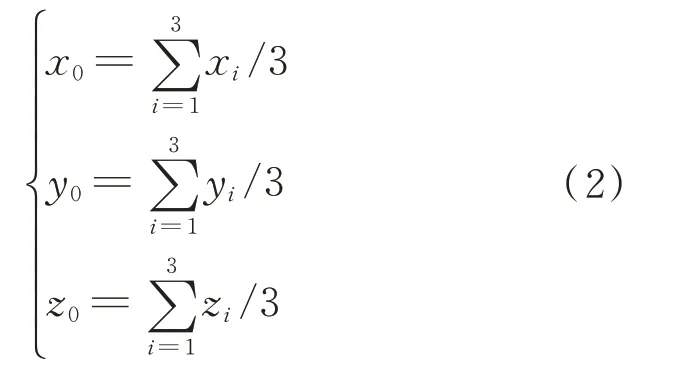
对计算网格而言,其运动状态与受力分析如图2所示,面元惯性力用式(7)表示。

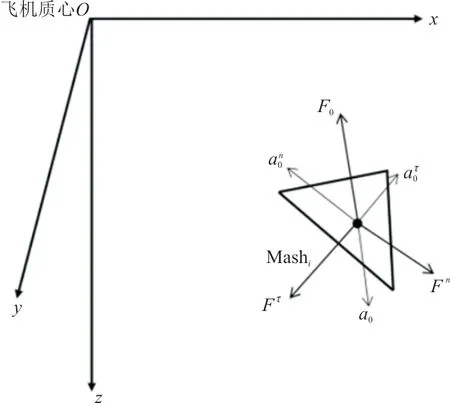
图2 三角形网格单元运动状态与受力示意图Fig.2 Motion state and force of triangular mesh element
对于线性惯性力F
,将机体姿态线速度分解到坐标轴上,分别得到机体质心线速度分解量a
,a
,a
。线性惯性力数值可以由式(8)表示:
F
,将姿态角加速度分解到坐标轴上,分别得到机体质心角加速度分解量ω
,ω
,ω
。 由 角加速度产生的切向惯性力F
,F
,F
的数值可由式(9)表示,引入方向矩阵n
后投影到坐标轴正方向,可由式(10)表示。
根据式(1)~式(12),最终得到单个计算网格单元的飞行载荷计算方法。将网格单元沿机身进行积分后就可以得到全机飞行载荷与机翼等关心部件的受载特征。
2 载荷平台开发
在实际高速无人机研发过程中,对飞行载荷的计算仅从算法角度研究是不够的。这主要由以下原因造成:
(1)算法只能计算单个网格单元的受载情况,实际应用于全机载荷分布需要遍历所有计算网格,这部分工作量仅依靠人工几乎无法实现。
(2)单一飞行工况无法完整描述全机的危险载荷情况。飞机各个部位的最危险载荷往往出现在不同算例中,必须基于平台发展相应的筛选方法。
(3)计算飞行载荷需要进行处理才能进行后续有限元仿真,对无人机来说主要的后处理步骤有载荷配平、剖面划分等。
因此,针对实际高速无人机设计需要开发与计算载荷相关的飞行平台,用于辅助飞机设计与校核。飞行平台需要开发集成的功能主要有:
(1)数据储存:对飞行工况的气动计算结果、姿态仿真储存结果、飞行器质量分布等进行预先写入与储存。
(2)载荷计算:根据设计算法,遍历所有网格,解算网格惯性载荷与气动载荷,并进行叠加、解算投影到正轴数值。
(3)区域积分:定义网格的标识坐标,设计区域输入功能积分,给定区域内的所有网格载荷数值。显然区域设计若包含整机,即能得到无人机机身的载荷分布情况。
(4)载荷配平:由于实际质量分布与姿态仿真时理想质量的差异,导致初步计算气动载荷、惯性载荷与重力不能满足空间力与力矩平衡方程。需要集成力与力矩功能对其进行修正配平。
(5)载荷筛选:高速飞行器往往需要计算成千上万种姿态与气动载荷的组合飞行载荷,需要集成筛选功能,设计合理的判据提取危险工况进行进一步分析。
(6)加载导出:对危险的筛选工况设计合理剖面,对对应有限元加载格式进行导出。导出的加载数据也需要经过配平检查,若不符合平衡方程需要配平模块微调。
载荷平台能够对气动外形设计、巡航路线仿真、零部件与总体结构设计进行迭代反馈。依托载荷平台进行飞机设计的流程如图3所示。
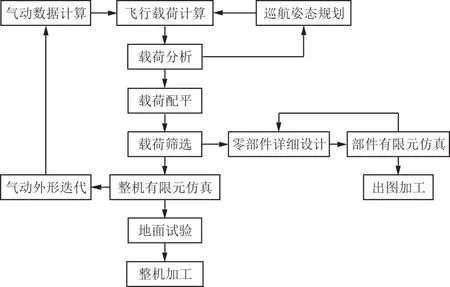
图3 载荷平台下无人机设计流程步骤Fig.3 Design process steps of UAV under load platform
考虑到载荷平台的实用性与型号间的继承与通用关系,对于平台在操作性和使用维护性上还需要有如下要求:
(1)需要具有良好的人机交互性能,操作界面简洁,配套编写相关使用手册指导各模块操作。
(2)需要具有较强的可维护性,为后续可能补充的功能提前预留接口。
(3)需要具有鲜明的图形可视化功能,数据输出为图像处理软件格式。
基于飞行载荷算法与载荷软件平台需求,结合型号总体部分实际要求,本文建立一种适用于某型高速无人机结构设计的载荷平台,能够实现载荷计算、后处理、筛选等功能。该平台通过MATLAB编写,通过部分工况测试验证其有效性。该平台GUI界面与组织架构分别如图4~图5所示。
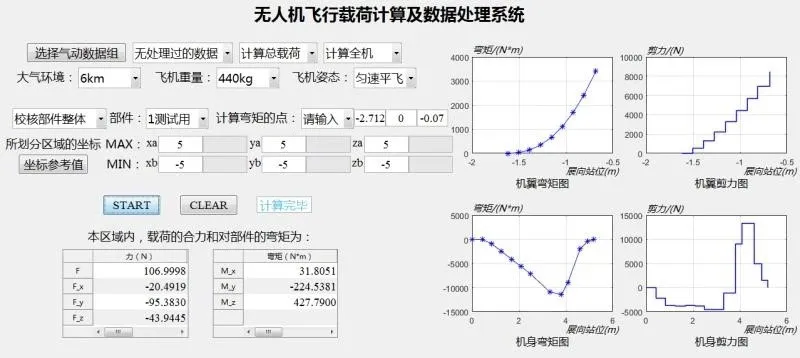
图4 载荷平台模块可视化界面Fig.4 Visual interface of load platform module

图5 载荷平台模块组织架构Fig.5 Load platform module organization structure
3 算例分析
通过对开发完成的部分功能进行测试与分析,并对数据结果进行分析,基于图像与数据趋势验证本文方法的正确性和计算能力。
3.1 载荷配平算例
本平台设计载荷通过对已计算飞行载荷用配平方法获得,假定三方向角速度ω
,ω
,ω
与角加速度ω
,ω
,ω
未知,联立解算空间力与力矩平衡方程。由于未知量与方程个数一致,能够求解出角速度配平校正值ω
′,ω
′,ω
′与角加速度配平校正值ω′
,ω′
,ω′
,再将其代入飞行载荷计算方法得迭代配平后飞行载荷数值,配平后飞行载荷能够满足力与力矩平衡方程,可以进行有限元输入。某工况下配平前后z
方向加载载荷对比如图6所示。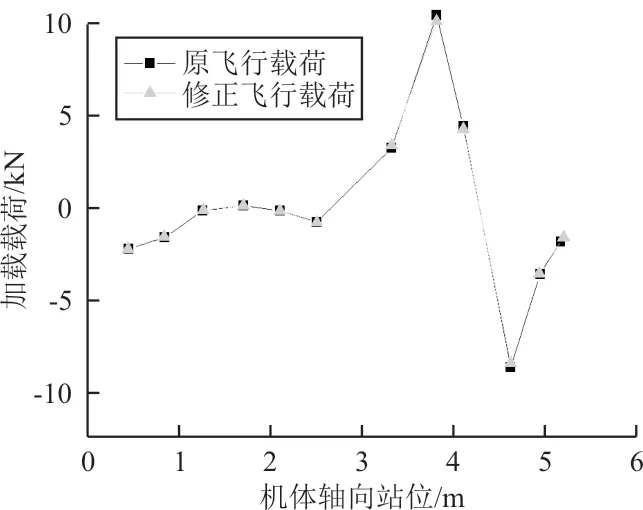
图6 整机配平前后载荷对比图Fig.6 Comparison of load before/after complete balancing
从图6可以看出:飞行载荷修正后与原载荷趋势非常接近,最大修正载荷位置位于3.80 m剖面处,修正量为2.7%。这是因为该剖面附近是飞机油箱与机翼结构规划位置,结构自重最大,惯性载荷修正后影响也最大。从趋势与极值数值上看,载荷配平修正功能是正确可靠的。
3.2 载荷分析算例
飞行载荷数据分析确定各项载荷占比对飞机包线规划反馈与结构设计具有重要参考价值。尤其是机翼等受载严重部件更需要对飞行载荷中载荷占比进行解算,从而了解机动动作对受载的影响。选用一组机翼小机动工况算例,验证载荷分析中总载荷分布情况与惯性载荷分布情况,结果分别如图7~图8所示。
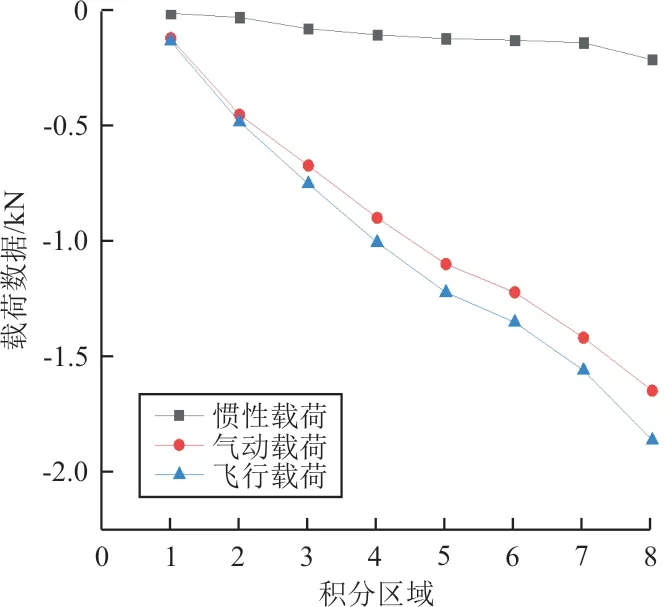
图7 机翼总载荷分布配比Fig.7 Wing total load distribution ratio
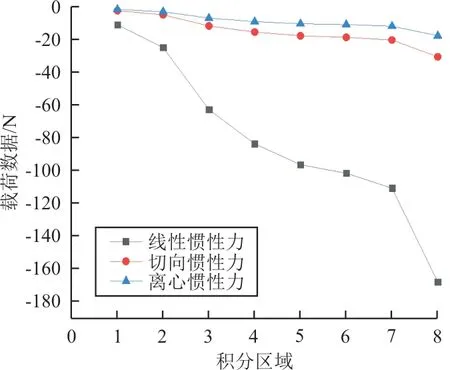
图8 机翼惯性载荷分布配比Fig.8 Wing inertia load distribution ratio
对于小机动工况,气动载荷是飞行载荷的主要来源,线性惯性力是惯性力的主要来源,图7~图8中的数据能够印证这一分析,验证了载荷分析功能的合理性。
3.3 载荷筛选算例
本平台载荷筛选判据采用单值包线法,关心的物理参数选用剪力与内弯矩,即选定合适的剖面,计算并绘制整机与机翼的剪力图与弯矩图。筛选每个区间内的极值,其对应的工况定义为危险工况。囿于篇幅,此处仅展示部分工况包线与筛选结果。整机剪力图与弯矩图如图9~图10所示。机翼剪力图与弯矩图如图11~图12所示。剪力方向以指向地面方向为正,弯矩方向以逆时针方向为正。其中第一组数字代表内外副翼舵偏角度,第二组数字代表俯仰角,第三组数字代表飞行器质量。

图9 整机剪力计算包线图Fig.9 Shear force calculation envelope of the UAV
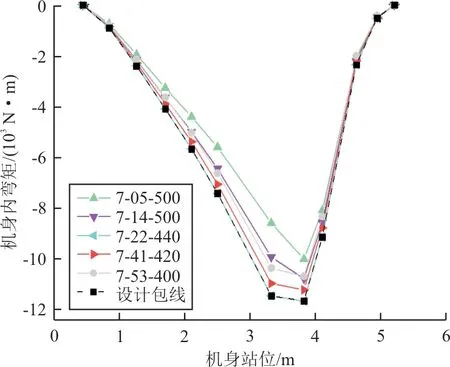
图10 整机内弯矩计算包线图Fig.10 Calculated envelopment of bending moment for UAV
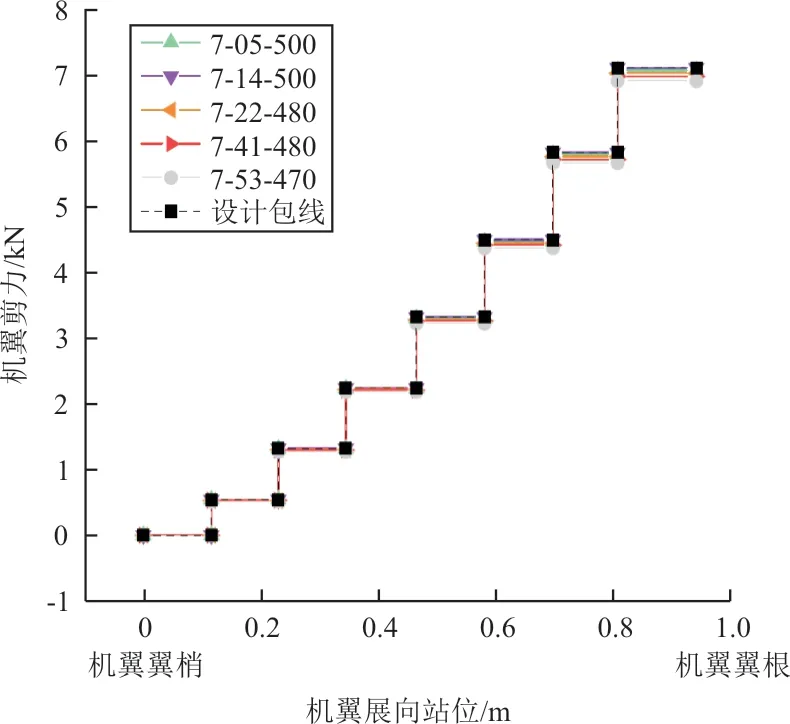
图11 机翼剪力计算包线图Fig.11 Calculated envelope of wing shear
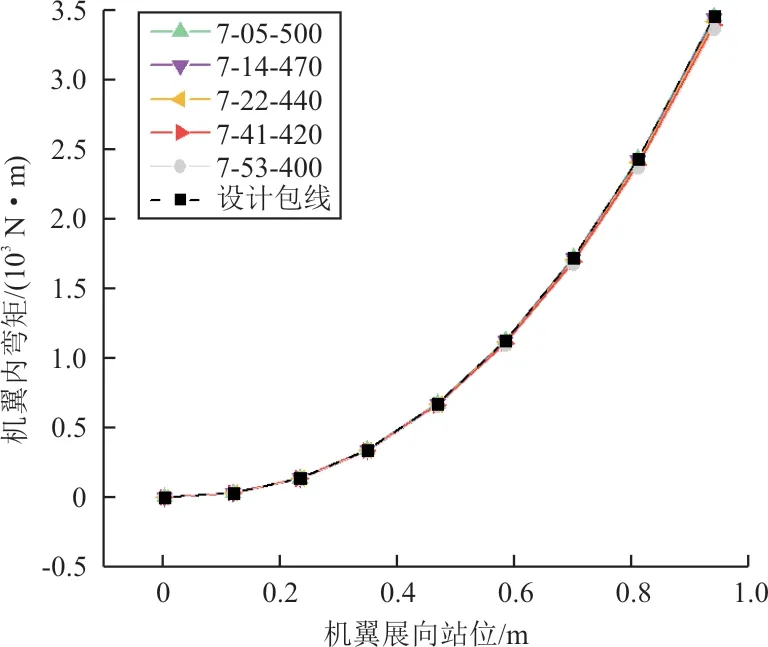
图12 机翼内弯矩计算包线图Fig.12 Calculated envelopment of airfoil internal bending
从图9~图10可以看出:整机受载最严苛位置位于整机中后段。这是因为该部分布置了油箱与动力系统,局部自重较大,此外机翼传递升力位置也位于该剖面处。综合来看,整机剪力与包线计算趋势与数值具有合理性。
从图11~图12可以看出:机翼最大剪力与弯矩位置位于翼根处,符合机翼类似悬臂梁的受载内力分布特征。
根据载荷配平、载荷分析与载荷筛选算例,每个数据平均计算时长为4 s,验证了开发载荷平台功能的正确性与参与高速无人机研发的实践价值。后续可以根据总体需求,进一步集成完善多型号适用、支持多值包线筛选、计算发动机载荷与停车载荷等功能。
4 结 论
(1)本文建立了一种以计算流体力学作为气动载荷输入手段的飞行载荷计算方法。考虑大机动条件下惯性载荷的影响,根据飞行载荷中载荷占比推算危险构件,以此建立机动动作和整机受载情况间的关系,从而为飞机包线规划反馈与结构设计提供参考。
(2)本文建立了以流体网格作为计算单元的载荷平台开发方法,提出了高速无人机载荷平台功能需求与使用需求,并据此开发了适用于某型号无人机的载荷计算平台。通过数据分析,验证了设计算法与所开发平台处理数据的正确性与实用性。可为其他型号高速无人机处理平台搭建提供参考与借鉴。
