一种对深空探测器信标信号的无源定位方法
2021-08-29沈小马吕斌涛叶建设卞韩城
沈小马,吕斌涛,孙 威,刘 阳,叶建设,卞韩城
(1.北京无线电测量研究所,北京 100854;2.北京跟踪与通信技术研究所,北京 100094;3.酒泉卫星发射中心,酒泉 732750)
引 言
深空探测器按照探测目标可分为月球探测器,如“嫦娥三号”(Chang'E-3,CE-3)和“嫦娥四号”(Chang'E-4,CE-4)落月探测器、“嫦娥五号”采样返回探测器,太阳探测器、行星及星际探测器(如火星、木星、小行星的采样返回式探测器等),可帮助人类研究太阳系及宇宙的起源、演变和现状,进一步了解空间现象和地球自然系统之间的关系,进而拓展人类生存的空间。深空采样返回探测器具有体积小、重量轻、速度快、示位能力相对较弱,在地球返回时的着陆区范围较大,返回时机受地面气象条件关联性大的特点。对携带样品的高速弹道式再入深空返回器实现快速空间定位、安全回收,提高着陆预报精度,是确保整个深空探测航天工程任务圆满顺利完成的关键。根据搜救任务组织模式,构建测控信息网、搜救卫星信息网和区域定位信息网[1]。在返回阶段,测控信息网目前使用主动式靶场测量雷达和S频段统一测控设备[2-3]对返回式探测器进行跟踪探测。
搜救卫星信息网使用国际救援组织的搜救卫星(COSPAS-SARSAT)[4-5],对返回式探测器的信标信号进行定位和解调,将定位结果传至中国极低轨道搜救任务控制中心。区域定向信息网中使用飞机和直升机载超短波定向仪对信标信号进行搜索测向[6]。主动式靶场雷达和统一S波段(Unified S-Band,USB)测控设备使用地面单站部署形式,当着陆位置偏差较大时,由于地球曲率条件限制,对返回式探测器的低空测量能力受限,着陆点预报误差也相应增大。刘磊等[6]对到达时间差(Time Difference Of Arrival,TDOA)无源定位系统的原理与影响因素进行了分析,可以应用到对返回式探测器的无源定位中。杨洁等[7]提出基于修正Rife算法的雷达信号载频估计,可以应用到对信标调制包络的频率估计中。
搜救卫星信息网对返回式探测器的测量实时性较差。机载超短波定向仪对返回式探测器信标的测角精度不高,不能直接获取距离信息,测向交叉定位误差较大。针对以上不足,需要拓展其它测量手段,增强对返回式探测器定位性能,提高搜索效率。通常对各类无线电辐射源(含无线电信标)的定位可以使用无源定位手段,定位体制包括长基线时差定位、测向交叉定位、单站无源定位等[7-8]。长基线时差定位相比其它手段精度较高,因而得到了广泛应用,应用领域包括移动通信和防空警戒[9]。
本文基于多站长基线时差定位原理[10]和信标信号包络具体特性分析,提出了一种对返回式探测器信标信号的长基线时差体制多站无源定位方法。实现了对深空返回式探测器进行快速精确定位,并通过仿真计算表明定位精度满足使用需求。
1 长基线时差体制无源定位
时差定位法基于辐射源发射的信号到达两个观测站的距离差(距离差=时间差×光速)规定了一组以两观测站为焦点的双曲线[11]。因此若在二维平面内有3个观测站组成两条基线,则两组双曲线的交点就决定了平面内目标的位置,如图1所示。

图1 双曲线定位Fig.1 The hyperbolic location
目标到各副站的距离为

目标到主站的距离为

目标到各副站距离与到主站的距离差为

根据3个时差测量值,可以得到3个距离差,通过方程求解可以得到目标的三维坐标(x,y,z)。由式(3)得到


以r0为参变量,令
由式(6)和式(7)代入式(5)得到
使用行列式方法求解得到如下系数

则对应目标位置的表达式为
将式(19)带入式(2),得到

其中二次方程的系数为
代入式(19)得到目标位置。当已知各站位置,并测量3个时差,可确定目标位置。由此得到了基于时差测量的4站三维目标定位解法。
2 信标信号时差测量分析
2.1 信标信号特性
在返回式探测器上通常会安装信标机,在探测器出黑障或开伞后发射无线电信标信号,一般使用甚高频(Very High Frequency,VHF)和特高频(Ultra High Frequency,UHF)频段。为了区别于其它信号,对信号进行特定调制。典型的是使用幅度调制,调制包络为单频正弦波。在地面使用多个接收处理站对信号进行测量,通常包括一个主站和多个副站。对于多站系统而言,主站和某个副站接收AM调制形式信标信号S0(t)和S1(t)分别为
其中:t 为时间;ma为调制度;Tm为正弦调制信号周期;τ为主、副站接收信号时差;fc为射频载波频率;φ0为主站调制信号初相;为副站调制信号初相;θ0为主站载波信号初相;θ1为副站载波信号初相。
正弦调幅信标信号时域波形如图2所示。对于空间上分置的两个接收站,若接收机本振间不相参,则多个站接收信号的中频相位无特定关系,而调制包络体现了信号间的时差关系,两路有时差关系的信标信号正弦包络如图3所示。

图2 信标信号时域波形示意图Fig.2 The beacon signal waveform of time domain

图3 信标信号正弦波包络时差相差对应关系Fig.3 The phase difference and time difference for sinusoidal envelope of the beacon
与脉冲调制信号所不同是信标信号的调制包络为正弦连续波,特征时间不如脉冲前沿显著。包络变换缓慢,利用幅度特征点提取特征时间比较困难。利用正弦信号相位与频率之间的关系,可以得到主、副站信号的到达时差为


由式(25)可知,时差测量问题转化为求正弦包络信号的频率和初相问题,其中对调制包络频率参数估计尤为重要。
2.2 调制包络频率相位估计及时差测量
对调制正弦波包络频率估计可以使用常规的Rife(双谱线)算法[12],但该算法对信噪比要求较高,并且被估计频率位于量化频率点附近时频率估计误差较大。因此采用改进的Rife算法[13]进行频率估计,其采用频移技术将信号的频谱移动 Δk量化单位,使得被估计频率尽量接近两相邻谱线中心,然后再进行估计。
移频因子Δk为

基于频移和DTFT技术,采用改进的Rife算法频率估计公式为

改进的Rife算法具有稳定良好的频率估计性能,计算量较小,易于硬件实现,能对信号进行实时处理。
根据调制包络频率估计,基于DTFT算法对正弦包络初相为


通过对主站及其副站接收信号包络的频率和相位估计,并利用式(25)可以得到对应的时差。
2.3 时差解模糊
当信标信号包络的调制周期为Tm,对于最大±Tm/2的时延不会产生模糊,对应主、副站间距离小于c·Tm/2测量时不会产生模糊,其中 c为光速。布站时应尽量保证基线长度满足时差不模糊要求。
当主站与某个副站间距离大于c·Tm/2时,则目标到达两站间的时差会出现模糊现象,此时需要进行解模糊处理。
首先利用其它主、副站间距离小于c·Tm/2的时差进行定位,确定目标粗略位置;其次基于粗略位置信息,求出站间距离大于c·Tm/2的主、副站的粗略但无模糊时差ΔT1。利用系统测量的精确但有模糊时差Δt,求解模糊数k,进而得到精确且无模糊时差ΔT2为
代入所有无模糊的时差,进一步求解得到目标的精确位置。
2.4 信标信号时差测量精度仿真
信标信号时差测量精度仿真时,对理想信标信号加上不同信噪比对应的窄带噪声,采样率取1 MHz,处理时长取1 s,使用式(28)的方法计算包络信号的初始相位,根据式(25)计算时差,蒙特卡罗次数按500计,统计时差的均方根误差,得到在不同信噪比条件下,信标信号时差测量精度,如图4所示。

图4 不同信噪比条件下信标信号时差测量精度Fig.4 The relationship between TDOA precision and SNR of the beacon
3 信标信号无源定位精度分析
3.1 无源定位精度
在三维无源定位场合中,需要用4个观测站进行时差测量,目标到各个观测站的距离差为[4]

其中:目标位置(x,y,z),主站坐标(x0,y0,z0),副站坐标(xi,yi,zi),(i=1,2,3)。
对距离差求偏导得

等价于

其中:c为光速。
定位误差协方差矩阵为
其中:στ为时差测量误差。计算目标定位圆概率误差

根据分析区域内目标不同位置,可以得到目标定位圆概率误差分布。
3.2 信标信号无源定位精度仿真
对返回式探测器进行搜索时,通常使用直升机在理论着陆点周围采用四方形进行空中布站,边长取40 km,分析区域取(±150 km)×(±120 km)。时差精度按240 ns设定。信噪比与距离平方成反比。利用式(32)~(36),得到目标的圆概率误差分布,结果如图5所示。
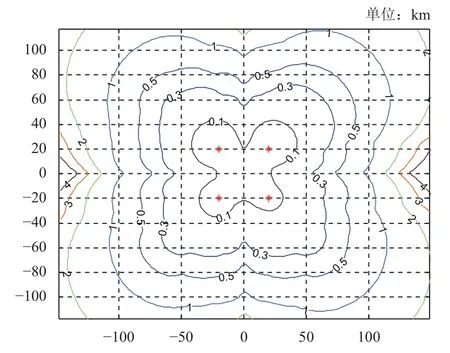
图5 时差定位系统圆概率误差分布图Fig.5 CEP distribution of TDOA location system
从图5可以看出在四方形布站条件下,目标距离越远时定位误差越大,而且定位误差随目标角度变化不大,近似各向同性分布。在100 km半径范围内定位误差小于1 km,可以满足返回式探测器搜索定位需求。
3.3 航迹跟踪精度仿真
返回式探测器通常在开伞至着陆前发射信标信号,时差体制无源定位系统可以对运动过程中的返回器目标进行跟踪,站址为四方形布站,边长40 km,仿真航迹和布站如图6所示。对定位点迹使用常规α-β滤波[11],目标定位跟踪时距离误差和方位误差如图7~8所示。

图6 目标轨迹和站址分布图Fig.6 Distribution of Target track and Station
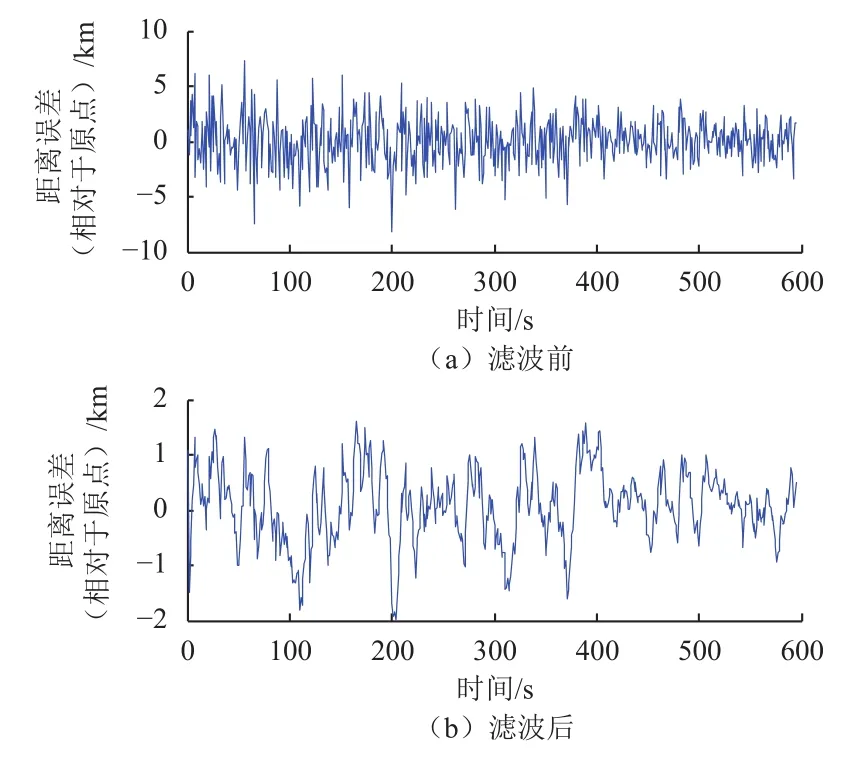
图7 时差定位目标跟踪距离误差Fig.7 Distance Error of tracking of TDOA location system

图8 时差定位目标跟踪方位误差Fig.8 Azimuth Error of tracking of TDOA location system
可见对返回式探测器的信标信号进行时差定位处理,经航迹滤波后,距离误差小于1 km,方位误差小于1 min,定位性能优良,可以满足实际工程中的搜索定位需求。
4 目标速度测量分析
4.1 速度测量
对于主动雷达而言,通常测量目标的多普勒频率,也就是目标回波的载波频率和发射波形载波频率的差值来计算目标速度[14]。多普勒频率与目标速度以及波长的关系为

其中:v为目标径向速度;λ为载波波长;fc为载波频率;fd为多普勒频率。
对于无源定位系统而言,作为纯接收系统信标信号不能发射频率精确值,不能像主动雷达直接获得目标的多普勒频率,但可以测量多个接收站接收信号频率差值,来对目标进行速度估计。
由于水平布站时各站高度差别不大,目标在垂直方向的速度引起多普勒频差较小,通常可以忽略不计,对目标速度的估计可使用二维模型,运动目标发射主副接收站接收的信号频差Fd为

使用最小二乘算法对目标速度进行估计得到

使用时差定位的目标位置和测量的目标多普勒频差,可以求得目标速度。
4.2 仿真分析
设置目标速度设为40 m/s,多普勒频差均方根误差设为1 Hz。目标仿真航迹和布站如图9所示。利用式(43)得到速度估计误差,如图10所示。仿真结果速度误差均方根误差优于1.5 m/s。
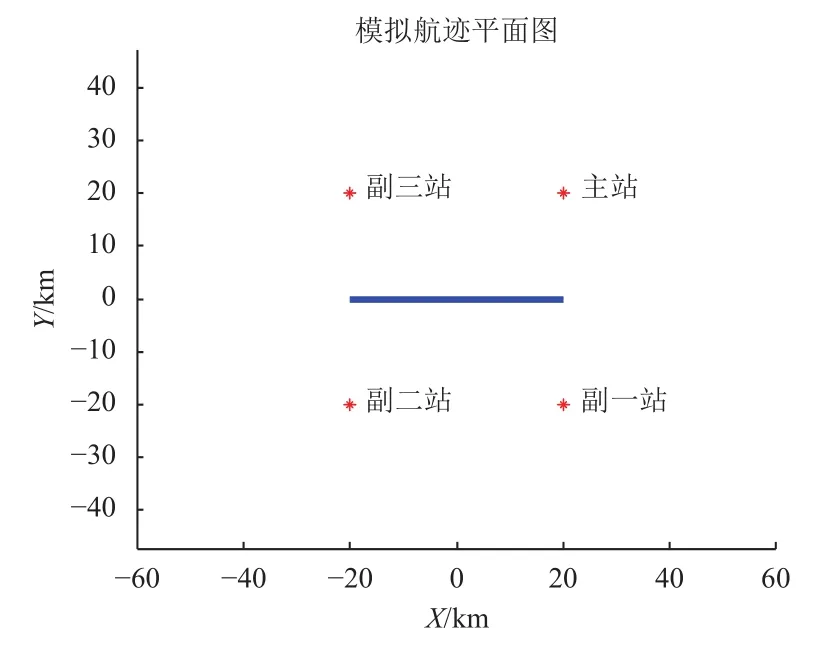
图9 目标轨迹和站址分布图Fig.9 Distribution of Target track and Station

图10 速度估计误差Fig.10 Velocity Error of the Target
5 结 论
本文提出了针对返回式深空探测器信标信号的长基线无源时差定位方法,通过对信标信号包络频率、相位以及时差等参数的测量算法分析和定位精度仿真,结果表明在适当布站情况下对100 km范围内返回器定位误差优于1 km,可以作为对现有测控信息、搜救卫星信息和区域定位信息的有效补充,具有一定的工程实现意义。这对于高动态小目标、大着陆范围的返回式深空探测器解决了低空探测难题,显著提升了着陆预报精度,为后续深空探测活动及任务规划奠定了技术基础。