CRH380BJ-A型高寒综合检测列车制动系统研制
2021-08-28李宏伟呼功崛周春梅
亢 磊,李宏伟,乔 峰,刘 琨,呼功崛,周春梅
(中车长春轨道客车股份有限公司,吉林 长春 130062)
CRH380BJ-A型高寒综合检测列车(以下称高寒检测列车)是为满足我国高寒低温地区时速350 km线路检测维护需要设计的,该车作为目前世界上真正意义的具备高寒地区时速350 km运营经验的、检测项点齐全的、检测精度高的综合检测列车,对保证高寒地区轨道设备设施的正常检测具有无可替代的作用。本文将根据高寒检测列车技术指标和检测设备功能的技术要求,详细介绍制动系统的研制方案、功能组成、控制功能原理、设计计算和试验验证等内容。
1 系统配置及参数
高寒检测列车为8辆编组,满足检测系统和检测人员生活工作的功能需求。其中01/03/06/08车为动车,02/04/05/07车为拖车,每辆车配置一个制动控制模块。01/08车的1轴和03/06车的1轴、4轴配置撒砂装置;03/06车各配置一个主供风单元;02/07车各轴设置停放制动装置,各配置一个辅助供风单元,且3轴为按运行方向的常用制动隔离轴;04车的2轴为常用制动隔离轴,4轴采用无制动力的轮轨力检测轮对。图1为高寒检测列车制动系统装置配置图。

图1 高寒检测车制动系统装置配置图
高寒检测列车最高持续检测运行速度为350 km/h,最高试验检测速度为380 km/h,满足低温-40 ℃的检测环境,最大常用制动减速度0.8 m/s2,紧急制动减速度1.0 m/s2,制动冲动极限0.75 m/s3,各初速度等级的紧急制动(EB、UB)距离满足表1要求。

表1 各初速度等级紧急制动距离要求
制动系统遵守“故障导向安全”的多级冗余设计原则,采用了由微机控制的直通电空(EP)制动和制动管(BP)控制的间接制动构成的空气制动系统,同时制动系统与牵引系统相结合实现动力制动的电制动功能。
2 系统组成
高寒检测车制动系统主要由制动及防滑控制系统、供风系统、基础制动装置组成,主要实现常用制动、紧急制动EB、紧急制动UB、停放制动、乘客紧急制动、防滑控制及轴抱死检测、备用制动和回送救援、压缩机供风控制管理、撒砂控制等控制功能。
2.1 制动及防滑控制系统
制动及防滑控制系统主要由电子制动控制单元(EBCU)、气动制动控制单元(PBCU)及相关功能气路控制模块组成,实现制动系统的功能控制、故障诊断等功能,通过TCN列车网络实现分层控制管理,通过硬线及网络接口实现制动控制信号的采集、逻辑运算控制及诊断。
(1) 制动及防滑控制系统网络拓扑图如图2所示。制动及防滑控制系统共用列车成熟稳定的TCN网络,全列8辆编组分为2个MVB控制单元,单元内的通信由车辆数据总线MVB来完成,单元间的通信通过网关(GW)由列车总线WTB完成。
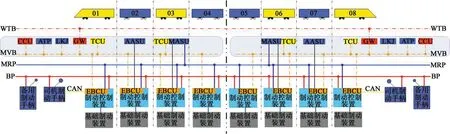
图2 制动及防滑控制系统网络拓扑图
(2) 制动及防滑控制系统控制架构如图3所示。构架主要分3个层级实现制动控制的管理,分别为列车制动管理、单元制动管理和本地制动控制[1]。

图3 制动及防滑控制系统控制架构图
列车制动管理器(TBM)由占用端头车EBCU担当,且EBCU1.1和EBCU1.2冗余,主要用于制动管理、主供风单元管理、制动试验和制动管充风管理。
01/08车的EBCU作为单元制动管理器(SBM)进行本MVB单元的管理,且EBCU1.1和EBCU1.2冗余,负责通过MVB收集本单元内每个EBCU 最大可用空气制动力和实际空气制动力、每个牵引控制单元(TCU)最大可用电制动力、每车的车重等信息,汇总后通过MVB/WTB向TBM进行上报,同时接收TBM 通过MVB/WTB发送的制动指令,并通过MVB 发送至本MVB单元内各EBCU和TCU。
本车EBCU作为本地制动控制单元(LBCU)实现对本车的制动控制、防滑控制和故障诊断等功能,负责计算本车最大可用空气制动力和实际空气制动力等,通过MVB将信息发送至SBM,同时接收SBM发送的制动指令,实现本车的制动控制。
(3) 制动控制系统与制动环路和列车指令线接口如图4所示[2]。制动系统通过电气接口接收和发送制动指令和制动状态信号,实现制动系统基本的功能控制。制动控制系统的主要电气接口分为硬线信号接口和网络信号接口。
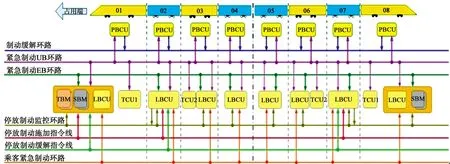
图4 制动控制系统与制动环路和列车指令线接口
制动控制系统与司机制动手柄接口包括常用制动子模式开关量信号和制动指令模拟量信号,司机制动手柄输出信号由指令转换模块采集并通过CAN总线发送给TBM。制动控制系统与列车安全环路和列车指令线存在指令接口,根据列车安全环路状态和指令线信号的定义进行相应级别制动的施加和缓解。
制动控制系统与TCU之间的硬线信号为ED电制动激活信号。
制动控制系统与列车网络CCU通过单元MVB和WTB总线协议实现网络接口信号的传输,网络接口信号包括状态信号、指令信号等,实现制动系统控制和诊断信息交互功能。
2.2 风源系统
风源系统包括主供风系统和辅助供风系统。
(1) 主供风系统由2套主供风单元组成,全部供风单元工作时可以提供2 496.0 L/min压力空气。计算所得的最大用风量为1 117.1 L/min,可以满足制动系统及其他用风系统(门、卫生间、空调、受电弓、空气弹簧等)的需求。制动控制系统通过网络和硬线指令对主供风单元进行管理控制。
(2) 辅助供风系统是在动车组总风压力不足且车辆无中压供电导致主供风单元无法启动时,通过蓄电池DC 110 V电源启动辅助空压机对受电弓、主断路器、车顶隔离开关供风,使高压系统正常工作实现供电,制动控制系统负责对辅助供风单元进行控制。
2.3 基础制动装置
高寒检测车每个动轴上配备了2套轮盘式基础制动单元,每个拖轴上配备了3套轴盘式基础制动单元。每个基础制动单元由制动盘、夹钳单元和闸片构成。
(2) 制动夹钳单元主要包括常用制动夹钳单元和带停放制动缸的夹钳单元,为适应高寒风雪环境需要,夹钳单元与制动盘间隙加大为3~6 mm,制动缸增加安全阀装置,杠杆螺栓增加快速注油脂装置。
(3) 制动闸片采用大间隙粉末冶金闸片,摩擦粒子为浮动式结构,能够提高盘片接触均匀性,使制动盘各部分热负荷更加均匀,同时增加了摩擦块之间的间隙尺寸,防止摩擦碎屑和冰雪杂质在摩擦块之间的堆积。
制动盘及闸片可以满足动车组连续两次从400 km/h初速度下的紧急空气制动要求,根据热容量计算,制动盘的最高温度低于700 ℃。
3 制动系统控制功能
3.1 常用制动
常用制动按照制动级别的模式曲线进行控制,包括直通电空制动(EP制动)和动力制动(ED电制动),在动轴上优先施加电制动,尽量降低EP摩擦制动的磨耗。在某种制动指令、负载条件和速度下,电制动可以在没有其他制动支持的情况下独立满足制动要求。如果电制动力不足,在拖轴上施加EP制动。当在动轴的电制动不能使用时,则动轴采用空气摩擦制动代替。当列车速度小于16 km/h时,进行空电转换,使所有轴均施加摩擦制动[3]。
常用制动指令来自制动手柄和CCU,由TBM接收和计算,通过MVB/WTB网络实现列车级的制动力分配。其中来自CCU的指令包括自身用于限速控制的常用制动指令、自动速度控制(ASC)的常用制动指令以及通过CCU转发的列车安全控制系统(ATP)的常用制动指令。
常用制动分为正常制动模式、比例制动模式和雪天制动模式。正常制动模式时,优先在动轴施加ED电制动,其次在拖轴上施加EP电空制动,当制动力要求值进一步增加时,动轴在电制动的基础上额外施加EP空气制动;比例制动模式是为了在所有轴上达到相同的黏着系数,在不利黏着的情况下,制动效果可以得到很大改善;雪天制动模式是为了在冰雪天气下清除和清扫制动盘上的冰雪,在列车所有轴上施加相同持续的微小摩擦制动力。
由于04车2轴设置轨道检测梁装置,为避免常用制动时车轴产生振动而影响轨检设备的检测效果,在04车2轴的常用制动控制中增加了轴制动隔离功能。当施加常用制动时,隔离模块电磁阀得电,通过总风管的隔离控制风压驱动气控阀隔离2轴制动缸压力,通过排风口将2轴制动缸内的风压排空,实现隔离保证轨检设备的正常检测。为保证紧急制动距离要求,在紧急制动时隔离功能不启用。
3.2 紧急制动EB
紧急制动EB触发源包括司机制动手柄置EB位、停放制动意外施加停放监控环路断开、司机警惕装置ASD和CCU触发等,本车LBCU通过紧急制动EB环路断开指令和CCU网络指令冗余执行紧急制动EB。通过司机制动手柄施加的紧急制动EB 可直接通过手柄进行缓解,其余方式触发的紧急制动EB 均为零速联锁。紧急制动EB过程中,本车LBCU 进行单车制动控制,按预设的速度模式曲线进行制动力控制,动车和拖车均切换至高阶制动压力状态,动车优先使用电制动,不足部分由本车空气制动补充,拖车仅施加空气制动。
LEC作为一种作业条件危险性评价方法,简单实用,通过LEC评价,可以量化确定城南污水厂工程建设过程中各类有害因素可能造成的潜藏祸患程度。其中,L、E、C分别代表3个自变量,D为因变量:
LBCU在紧急制动EB过程中监控车辆减速度。当本车LBCU检测到减速度不足时,向SBM发送“减速度不足”MVB信号,TBM综合各SBM的减速度不足网络信号发送“减速度不足”的硬线信号,断开紧急制动UB环路。
3.3 紧急制动UB
紧急制动 UB 触发源包括司机制动手柄置于UB 位、按下紧急制动按钮、转向架监控环路断开、ATP 和CCU触发等。如图5所示,紧急制动UB触发时,紧急制动UB环路断开的同时CCU通过MVB/WTB网络冗余要求LBCU激活直通制动充排风电磁阀冗余输出紧急级别预控压力。
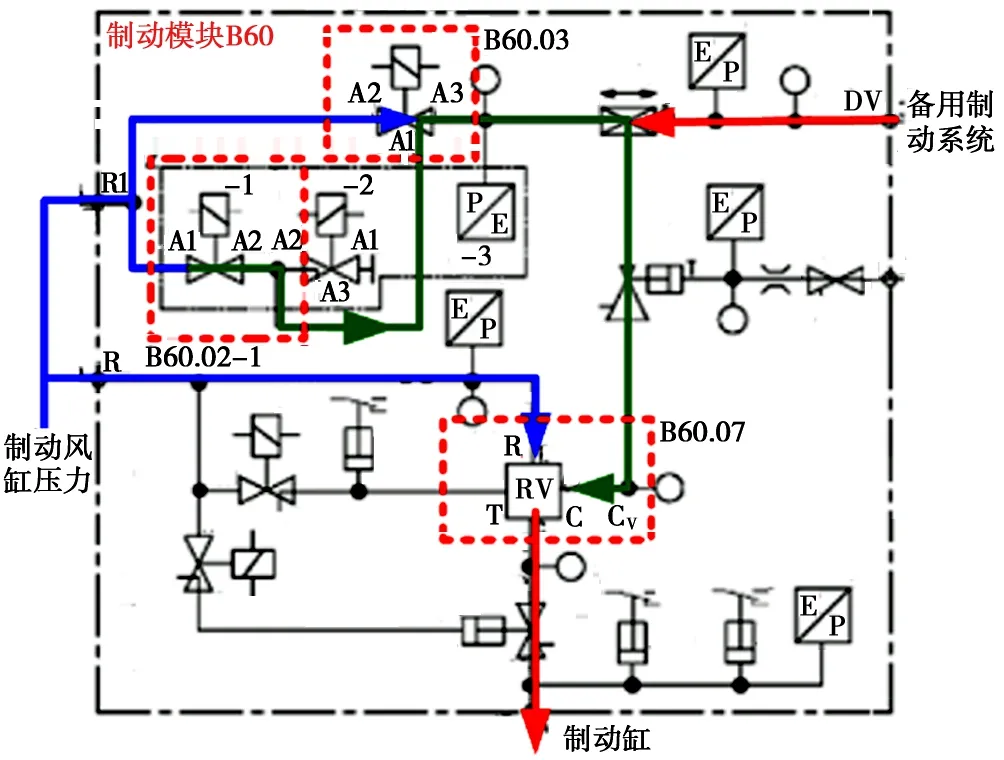
图5 紧急制动UB气路控制图
紧急制动 UB 时,如电制动可用,将参与制动以减小机械磨损。无论电制动是否可用,紧急制动距离均满足要求。为充分利用黏着并防止制动盘热容量超标,紧急制动UB 时实行空气制动力分级控制,即在相同的预控压力条件下,高速时施加低阶空气制动力,低速时施加高阶空气制动力,其中动车高低阶压力切换点由车速(80 km/h、255 km/h)和电制动力是否可用确定,拖车高低阶切换点由车速(300 km/h)确定。
紧急制动UB时,每个车的直通制动紧急制动电磁阀B60.03通过紧急制动UB环路断开得电,使制动缸风压直接产生中继阀B60.07所需的预控制压力Cv,直通制动充排风电磁阀B60.02-1产生冗余的紧急制动预控制压力Cv,制动管通过得电的紧急制动排风阀完全排风,通过备用间接制动冗余产生紧急制动的预控制压力Cv,同时司机制动手柄、紧急制动按钮触发时均可使制动管直接排风[4]。
3.4 停放制动
02/07车每轴设置一个停放制动缸,可保证列车长时间安全地停放在20‰的坡道上,并具有1.2倍的安全系数。司机通过施加停放制动按钮和缓解停放制动按钮激活列车指令线来实现停放制动的施加和缓解,在列车整备模式或等待连挂模式时,CCU可以激活停放制动施加列车指令线实现停放制动的自动施加,停放制动施加或缓解后,停放施加或缓解按钮指示灯由SBM相应控制点亮。
制动控制系统对停放制动进行监控,避免列车运行时停放制动意外施加。本车LBCU通过停放制动缸压力传感器对本车停放制动状态进行监控,当车辆速度大于3 km/h检测出停放制动施加时,本车LBCU将断开停放制动监控环路间接断开紧急制动EB环路,列车施加紧急制动EB,同时LBCU通过MVB/WTB 传达列车运行时停放制动施加信息至TBM,TBM可通过MVB/WTB网络冗余施加最大常用制动。
3.5 乘客紧急制动
乘客紧急制动触发源为乘客紧急制动手柄。操作乘客紧急制动手柄将断开乘客紧急制动环路(PEBL),TBM 监测PEBL状态并控制施加乘客紧急制动。操作乘客紧急制动手柄后,该信号将同时发送至本车LBCU,本车LBCU 将手柄操作状态通过WVB/WTB网络报送至TBM,TBM 根据车LBCU 上报状态同样会控制施加乘客紧急制动。
TBM接收到乘客紧急制动请求,将立刻施加最大常用制动。乘客紧急制动施加司机室会产生声光报警信号。司机将制动手柄置于OC 位可随时缓解乘客紧急制动,声音报警信号将消除,当列车停止,乘客紧急制动手柄恢复后,光报警信号将消除。
3.6 防滑控制及轴抱死检测
高寒检测车每个轴都安装有符合UIC标准的防滑保护装置,实现列车的防滑保护功能,有效防止车轮擦伤,提高黏着利用率,每车LBCU通过接收来自每个轴的速度传感器检测的速度信号,对每个轴的速度和减速度进行监测,空气制动防滑由本车LBCU进行控制,动车的电制动防滑由TCU进行控制。防滑控制装置利用采集到的速度传感器信息计算速度、减速度,并结合相应判据进行防滑控制。防滑控制模块主要有速度、减速度、参考速度计算,滑行判断,防滑控制、防滑阀输出超时保护,电制动减量控制等功能。
每辆车均设置相互独立的、冗余的不旋转轴检测装置(DNRA),符合UIC标准,动车的轴抱死功能分别由制动系统和牵引系统完成,拖车轴抱死功能由制动系统EBCU1和EBCU2分别完成。车辆DNRA检测到某一根轴的速度与参考速度的差值达到设定值并满足持续时间时,则认定该轴抱死,并将DNRA 监测信息发送至MVB,CCU根据DNRA检测状态触发列车最大常用制动并使列车自动限速40 km/h运行。
3.7 备用制动及回送救援
如果直通电空制动发生故障,列车可启动备用制动继续运行,备用制动采用分配阀控制模块实现阶段制动和升压一次缓解功能,在备用制动启动后,通过备用制动控制模块和备用制动手柄控制制动管的减压量来控制制动力的大小,并要求列车限速80 km/h运行。回送救援时,通过机车进行制动管的减压控制,实现列车的阶段制动和升压一次缓解功能。备用制动激活后,直通制动和电制动将不能使用。
3.8 供风单元控制管理
TBM负责列车主空压机控制,保证总风风压在850~1 000 kPa的正常工作范围内,满足制动系统和其他系统的用风需求。列车配置有2套主供风单元,制动控制系统对主空压机分3种模式控制。
(1) 正常模式:当总风风压降到850 kPa时,TBM激活首选主供风单元进行供风,当总风风压降低到830 kPa时,TBM激活第二个主供风单元进行供风,当总风风压降低到800 kPa时,TBM激活2套主供风单元错峰启动供风。
(2) 紧急驱动模式:如TBM对供风单元管理失效或网络通信故障列车进入紧急驱动模式,供风单元控制采用紧急驱动模式,LBCU进行本车供风单元控制,通过压力传感器检测到总风压力小于780 kPa,控制本车供风单元启动,当总风压力大于1 030 kPa,控制本车供风单元停机。
(3) 测试模式:在制动试验中,TBM会根据试验需要通过SBM控制相应单个供风单元启动。
辅助供风单元包括辅助空压机,当总风压力不足时,用于保证动车组正常升弓。辅助空压机供电正常条件下,CCU通过网络发送辅助空压机控制使能信号,由LBCU控制辅助空压机启停。如辅助空气压力低于550 kPa,则控制辅助空压机启动;如辅助空气压力高于700 kPa,LBCU 控制辅助空压机停机。为防止辅助空压机频繁启停,当90 min内辅助空压机启动次数超过2 次或运行时间超过10 min,本车LBCU在90 min内不启动辅助压缩机。
3.9 撒砂控制
为改善轮轨黏着条件,提高牵引制动性能,高寒检测车的01/08车1 轴,03/06 车1轴和4轴均安装有撒砂装置。当01车为主控端时,01车1轴、03车4轴和06车1轴撒砂功能有效;当08车为主控端时,08车1轴、06车4轴和03车1轴撒砂功能有效。
司机通过操作司机台撒砂开关手动控制列车撒砂,当撒砂开关拨至全轮对撒砂位时,CCU将撒砂指令和列车行驶方向信息通过列车网络发送至各动车LBCU,由动车LBCU根据运行方向控制本车撒砂装置撒砂;当撒砂开关拨至前轮对撒砂位时,占用端头车LBCU控制本车撒砂装置进行撒砂。
制动控制系统具备自动撒砂功能,动车LBCU在两种情况下激活自动撒砂:一是检测到本车空气制动严重滑行,二是TCU通过MVB通知LBCU检测到电制动发生滑行或牵引发生空转。
4 制动计算
根据既有平台动车组,针对高寒检测车4车4轴为测力轮对,不施加空气制动,需要将损失的制动力重新分配,按照各级制动减速度要求适当增加各车的制动力。紧急制动时,通过重新设定动车和拖车的空重车调整阀DBV曲线,将动车和拖车的制动力都适当增加,满足紧急制动距离要求,空重车调整曲线及紧急制动减速度曲线(不带风阻)见图6。

图6 空重车调整曲线及紧急制动减速度曲线(不带风阻)
根据上述减速度的定义和列车风阻减速度进行紧急制动EB、紧急制动UB的制动距离S计算,计算结果均能满足紧急制动距离要求。计算公式为:
式中:vk——离散化速度;
k——离散点编号;
Ns——离散点数量;
v0——制动初速度;
tU_max——制动缸升压时间tu和冲动极限要求的升压时间tu_I中取最大值。
制动距离计算结果如表2所示。
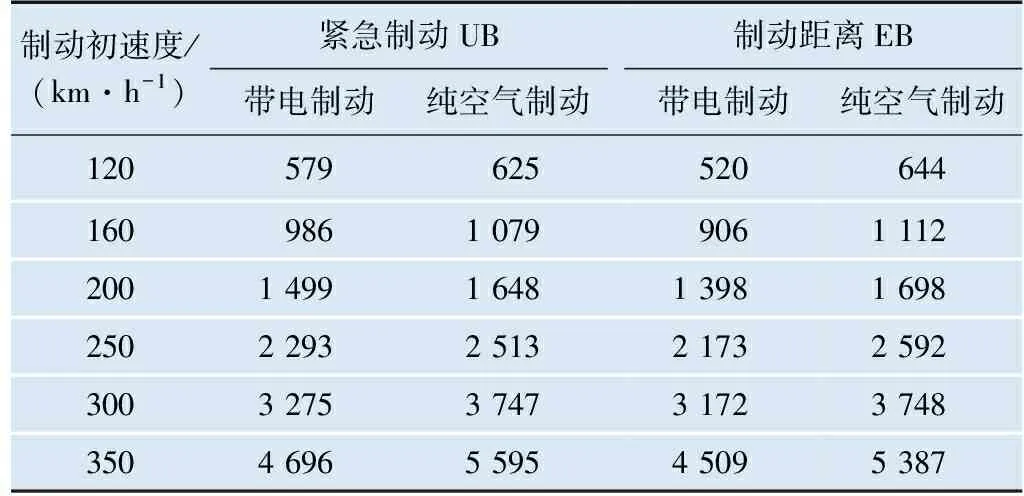
表2 紧急制动(UB、EB)制动距离 m
5 试验及结论
2016年4月高寒检测车在中车长客股份公司生产下线,为保证列车制动系统性能,从生产到正式交付运营过程中进行了一系列的调试试验工作,包括制动系统整列静态、动态调试,试验环线及高速客运专线试验段的制动系统功能验证测试,制动系统型式试验,以及制动系统故障模拟等试验,所有试验结果均满足试验大纲及设计要求。高寒检测车先后多次在大西高铁、郑西高铁、哈大高铁、京沈高铁等高速客运专线上承担了检测任务。高寒检测车的试验和运用实践证明,该车制动系统性能稳定,满足设计指标要求,为今后研制更加先进的高寒高速检测列车制动系统积累了宝贵的经验。
