无人机航空摄影测量技术在城市调查中的应用
2021-08-27齐永波
齐永波
(广东省核工业地质局二九二大队,广东 河源 517000)
城市调查是城市中长期规划和发展的基础,也是摸清城市土地资源利用现状的主要途径,因此如何快速获取城市调查成果是城市调查着重解决的问题[1]。本文以无人机航空摄影测量技术在广东省河源市和平县城市调查中的应用为例,分析该技术的应用效果和精度质量,为同类调查测量提供参考。
1 仪器设备及应用流程
本次城市调查采用无人机1台,型号为南方ZR⁃M66;无人机数据和航空影像数据处理软件1套,型号为Smart3D(ContextCapture Center)、IDATA 3D V1.0;内业数据处理软件1套,型号为Cass10.1。本次城市调查应用流程见图1。
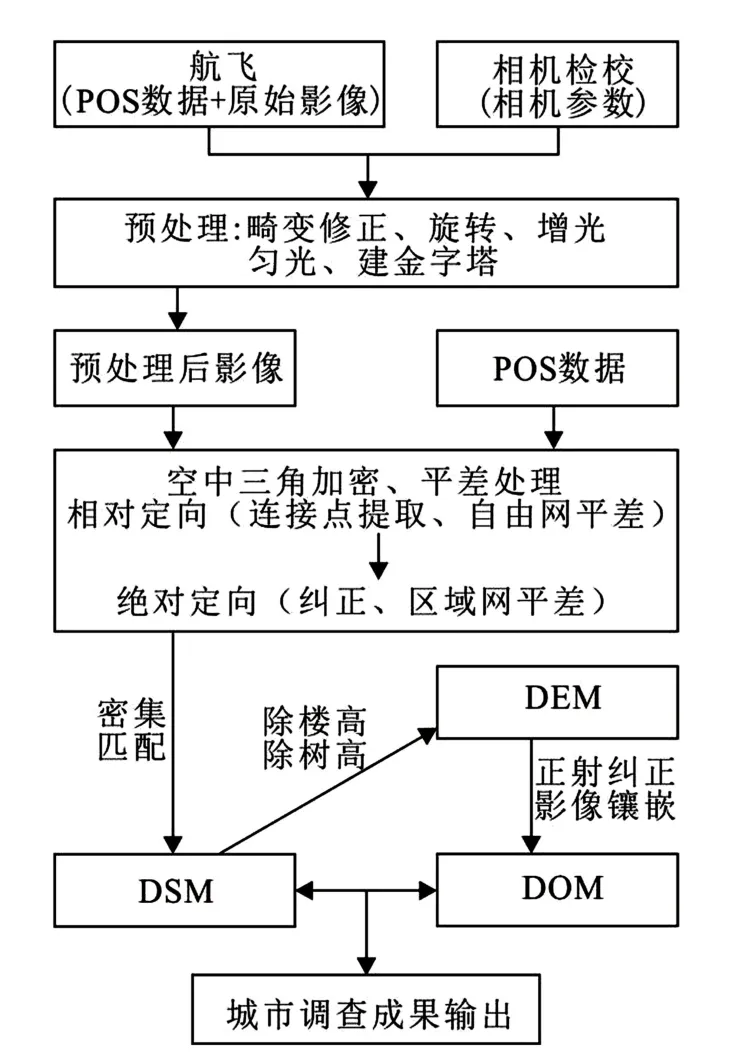
图1 无人机航空摄影测量技术在城市调查中的应用流程图
2 无人机航空摄影测量技术在城市调查中的应用
2.1 像控点布设及测量
(1)布设原则。像控点测量是提高城市调查精度的基础,其像控点的布设应遵循以下几点原则:①像控点应选择目标清晰的、无争议的地物;②为尽可能地降低或者消除影像投影差对影像数据匹配质量的影响,像片所选像控点的位置距像片边缘1~1.5 cm;③像控点应选择在视野开阔的区域,即应避免遮挡[2];④像控点的选择一般选择在田角、房角等区域,且与周边地物应形成较明显的灰度反差;⑤像控点应选择在交通便利、容易保存的区域,能够提高像控点的再利用程度。此外,布设的像控点尽量在测区保持分布均匀,一般采用九宫格布点法,航线两端及中间均隔一或两条航线布设平高点,既能保证成图精度,又能减少外业工作量。
(2)像控点选择。首先向各镇区自然资源所确定好镇区的航拍范围,使用Google影像图大概确定范围内均匀分布的若干像控点位置,再根据现场实际情况确定像控点标志。考虑到航飞区域相对航高较低,像控标志布设为L型,均选取内角点作像控点测量。所有像控点测量时都至少从2个角度拍照并保存。在有地物的地方直接选择在影像清晰的明显地物上,宜选在交角良好的细小线状地物交点、明显地物折角顶点、原始影像中大于0.2 mm的点状地物中心,同时应是高程变化较小的地方,易于准确定位和测量。
(3)像控点测量。本次测量使用2000国家大地坐标系,使用广东省CORS卡连接CORS网络,RTK采集使用控制点采集方式,分别采集2个测回,测回间RTK重新初始化,每测回采集5个历元,历元间隔2 s。测量时PDOD值≤4,HRMS≤0.03 m,VRMS≤0.05 m,取成果报告结果值为最终成果。
2.2 飞行参数确定及航拍质量
无人机遥控器,飞行前首先导入测区覆盖范围的KML航拍范围文件,或现场遥控器内自行标注范围。使用Google Earth Pro软件确定该航拍范围内高程落差,确定起飞点位置后,再根据最高处的高程来确定航高,航高一定要比测量区域最高点高出60 m以上,依据地形而定。飞行正射时选择关闭畸变校正,规划航线,选择航向重叠率为80%和旁向重叠率为78%。航空摄影测量选择6—9月上午10时至下午3时之间,该时段内的天气相对较好,如风速较小等。飞行测量完毕后获得的最终像片纹理清晰,色调柔和,部分地区略有阴影,总体上资料质量可靠,能够满足内业作业要求。航测镜头(正射)影像效果如图2所示。
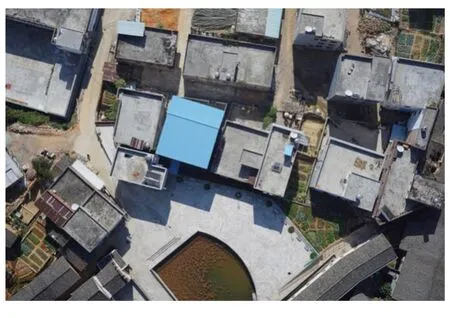
图2 航测镜头(正射)影像图
2.3 空中三角测量及数字正射影像制作
空中三角测量利用Smart3D(ContextCapture Center)影像处理软件进行,是消除航空影像数据中因遮挡等而存在“留白”问题的主要方法之一,通过POS数据结算实现。在数据解算过程中首先构建自由网,再对其进行同名点的匹配,获得相对定位的空中三角测量的同名点点云,再根据航空影像拍摄过程中自动存储的POS数据进行绝对定位平差,在此基础上实现空中三角加密解算。因此,空中三角测量的主要步骤包括:①数据预处理:对摄影数据进行分析、鉴别,包括飞行范围、记录数据、飞行质量、剔除多余片;②建立工程文件,添加该项目所有架次的航摄图片;③导入POS数据;④选择输出坐标系(CGCS2000);⑤选择3D Maps选项模板(生成DSM和正射影像图);⑥首先进行初始化处理,快速检测,查看快速处理得到的成果图(将分幅影像图拼接成一张影像图),检查快速处理质量报告,再次进行初始化处理中的全面高精度处理,建立影像金字塔,进行像片中同名特征点匹配[3];⑦导入控制点,绝对定向;⑧选择重新匹配并优化,输出空三质量报告,检查报告中区域网空三误差、自检校相机误差和控制点精度等。待空中三角加密测量完成后,选择软件处理选项中点云和纹理、DSM、正射影像和指数处理选项,其他参数选项可选择默认处理,即可输出该区域内正射影像图。
2.4 精度对比
为分析无人机航空摄影测量在城市调查测绘中的精度,本文在测绘区域内随机抽取10个控制点及周边的点云数据,将其平均值作为该点的坐标;同时,采用全站仪对上述10个点进行外业测量,进而对比二者之间的精度误差,如表1。由表1可知:使用无人机航空摄影测量技术获得的点云数据的三维坐标与全站仪测量获得的结果基本一致,其中平面位置中误差为±0.15 m,中误差最大值为±0.24 m,最小值为±0.04 m;垂向上(高程)的中误差为±0.098 m,中误差最大值为±0.308 m,最小值为±0.005 m。本次测量精度完全满足城市调查的精度要求。

表1 无人机航空摄影测量与全站仪测量精度对比
3 结束语
无人机航空摄影测量技术在城市调查中具有效率高、成本低、精度高等优势,同时能够减少大部分因人为操作失误等而造成的问题,成果质量均满足国家相应标准,能够适应现代化建设的基本需求。该技术广泛地应用于城市调查中,将有效提高土地资源规划以及权属确定等工作的效率和质量。
