计及油缸作用的起重机伸缩臂参数振动分析
2021-08-26刘士明赵越赢孟丽霞
刘士明,赵越赢,孟丽霞
(沈阳建筑大学机械工程学院,辽宁 沈阳 110168)
1 引言
伸缩臂是轮式起重机最重要的承载部件,当吊臂起升、下降或突然卸载的过程中,伸缩臂结构可能发生参数共振现象。在我国《起重机设计规范》GB∕T3811-2008中,将起重机伸缩臂静力稳定性分析模型等效为变截面阶梯柱,经研究证明是符合工程实际的[1-2]。因此,在计及油缸作用的起重机伸缩臂参数振动分析中,根据受力特点起升平面内伸缩臂简化为根部弹性支撑、上端自由的变截面阶梯柱模型,起升平面外伸缩臂简化为根部固支的变截面阶梯柱模型。文献[3]提出了解决周期载荷作用下的动力稳定性问题,以结构动力不稳定区的形式进行表达。文献[4]通过梁柱的动力微分方程,研究了直杆在周期载荷作用下的动力稳定性。文献[5]研究了周期载荷下复合材料悬臂梁的动力不稳定性,推导其动力学方程,并对不同参数组合成的组合梁进行参数振动分析。文献[6]应用Hamilton原理研究了双柱悬索拉线塔塔柱参数共振,根据Bolotin提供的方法建立临界频率方程,从而得到塔柱的主要动力不稳定区。然而,上述方法只适用于一些简单且截面连续变化的结构,不适用复杂杆系结构。因此一些学者尝试应用有限单元法求解结构的动力稳定性问题。文献[7]釆用有限元方法研究空间杆系结构的动力失稳区域,通过Ansys和Matlab软件进行编程模拟,并将分析结果与Bolotin方法进行对比。文献[8]采用有限单元法建立了空间网壳结构动力失稳的主动控制方程,通过研究发现可以通过主动控制避开或减小结构动力失稳区域。文献[9-10]采用有限单元法研究了起重机在周期载荷作用下起升平面外的伸缩臂的动力稳定性,对起升平面内没有研究,且忽略了变幅油缸的影响。
因此,将考虑变幅油缸的影响,运用Hamilton原理结合有限单元法,建立以Mathieu方程形式表达的伸缩臂参数振动方程,研究起重机伸缩臂动力不稳定区域,为起重机伸缩臂的设计计算提供依据,以指导工程实际应用。
2 伸缩臂参数振动的等效模型
在以往的伸缩臂稳定性分析中,为了方便计算,都忽略了变幅液压缸的影响,得到的结果很难符合实际工程中的需求。为充分考虑变幅油缸的影响,建立计及变幅油缸的伸缩臂平面内的受力模型,如图1所示。在起升平面内液压油缸提供转动的自由度,假设油缸的刚度为无穷大,则伸缩臂油缸以下的基本臂即l0段连同变幅油缸可以等效为一个转动刚度为K1的弹性支撑。

图1 油缸转动刚度计算模型Fig.1 Cylinder Rotational Stiffness Calculation Model
文献[11]给出了K1的计算方法,长度为l0的两端铰接柱在顶端受力矩M时其柱段转角为:

当令M=1时,得到柱端柔度,其倒数就是所求的液压油缸的转动刚度:

因此,起重机伸缩臂在轴向周期载荷P(t)作用下起升平面内动力稳定性分析等效模型,如图2所示。即为根部弹性支撑的多级阶梯柱模型。

图2 平面内伸缩臂的动力稳定分析模型Fig.2 Dynamic Stability Analysis Model of Telescopic Arm in Plane
在起升平面外变幅油缸不能承受载荷,因此,根据受力特点将起重机伸缩臂在轴向周期载荷P(t)作用下起升平面外动力稳定性分析模型等效为伸缩臂根部固定的悬臂阶梯柱模型,如图3所示。

图3 平面外伸缩臂的动力稳定分析模型Fig.3 Dynamic Stability Analysis Model of Out-of-Plane Telescopic Arm
3 参数振动方程和临界频率方程
由参考文献[9]可知,忽略轴力P(t)引起的轴向位移,根据能量原理,单元的动能T e、弯曲应变能、外力做功的值为:

式中:f y(x,t)—单元的横向位移;l—单元长度;E—弹性模量;A—截面面积;I—惯性矩;ρ—密度。
令梁单元的质量矩阵为M e,线性刚度矩阵为K e0,单位几何刚度矩阵为S e,根据非线性有限元理论得到:

设周期载荷P(t)=P0+P tcosθt,将式(6)和式(7)代入拉格朗日方程,得到无阻尼时系统的参数振动方程:

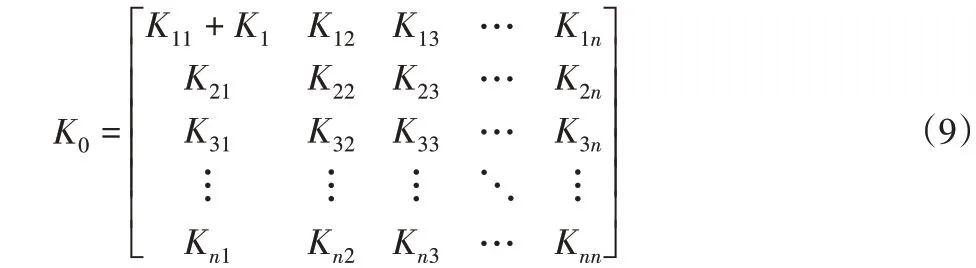
在组装系统的整体刚度矩阵时,考虑到液压油缸提供转动刚度的影响,应将油缸的等效弹簧刚度K1加到刚度矩阵K0中:
考虑阻尼时,整个系统的参数振动方程变为:

在工程上常将其它形式的阻尼按照它们在一个周期内能量耗损相等的原则,折算成等效粘性阻尼,则此时系统的阻尼矩阵的表达式为:

式中:α—频率无关的常数。
将式(11)代入式(10)得到考虑阻尼时伸缩臂的参数振动方程为:

式中:β—无量纲阻尼系数
式(10)和式(12)是Mathieu方程,由方程性质可知,方程的解具有周期性,周期分别为2T和T。令其解的表达式分别为:


将式(13)和(14)分别代入式(12)中。令sin(kθt∕2)和cos(kθt∕2)的同类项系数等于零,得到两个齐次线性方程组,令矩阵的系数行列式为零,则可得到有阻尼时的临界频率方程:

工程实际中最危险的是k=1(第一动力不稳定区域)和k=2(第二动力不稳定区域),所以令k=1、2,则有阻尼时第一和第二动力不稳定区域的临界频率方程分别为:

令β=0,可得无阻尼时的第一和第二动力不稳定区域的临界频率方程:

4 算例分析
以工程中常见的五节起重机伸缩臂为例,研究伸缩臂在周期载荷P(t)=P0+P tcosθt作用下伸缩臂的动力稳定性即参数振动,其平面内和平面外动力稳定性计算模型,如图4、图5所示。

图4 平面内五节臂计算简化模型Fig.4 Simplified Model for Plane Five-Section Arm Calculation

图5 平面外五节臂计算简化模型Fig.5 Simplified Model for Out-of-Plane Five-Section Arm Calculation
变截面阶梯梁的总长度为L=30m,各段长度分别为l1=0.24L,l2=0.19L,l3=0.19L,l4=0.19L,l5=0.19L。弹性模量E=200GPa,截面惯性矩I1=1.1786×10-2m4,I2=I1∕1.3,I3=I2∕1.3,I4=I3∕1.3,I5=I4∕1.3,密度ρ=7800kg∕m3,变幅油缸上铰点以下基本臂的长度l0=3m,图中l′=l1-l0。为了便于分析动力不稳定区域,设P0=0,主要研究其第一、二动力不稳定区。横坐标定为载荷幅值P t,纵坐标定为临界振动频率θ*,做出伸缩臂在平面内和平面外的动力稳定性分析曲线,如图6、图7所示。将平面内外的第一动力不稳定区叠加比较,如图8所示。
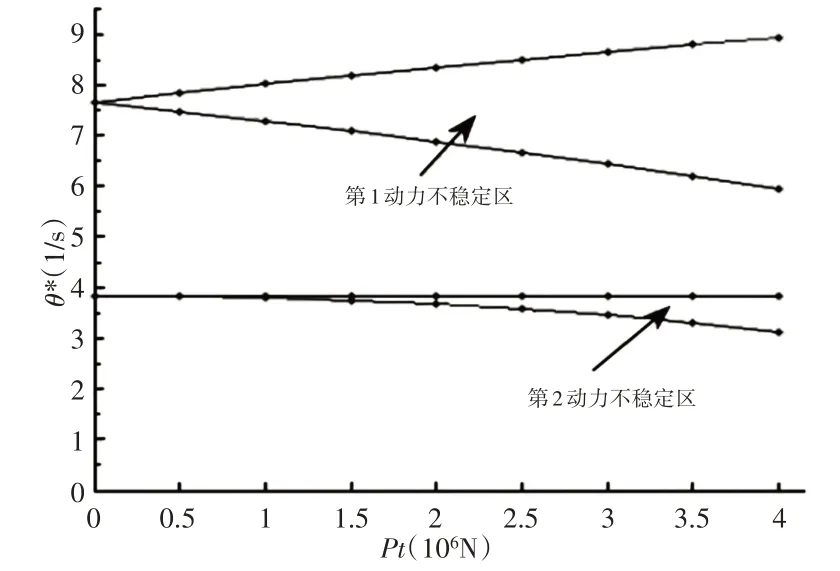
图6 平面内动力稳定性曲线Fig.6 In-Plane Dynamic Stability Curve

图7 平面外动力稳定性曲线Fig.7 Out-of-Plane Dynamic Stability Curve

图8 平面内和平面外动力不稳定区比较Fig.8 Comparison of In-Plane and Out-of-Plane Dynamic Instability Regions
使用Newmark积分获得图8中A、B、C、D、E、F六个位置的动力学响应,以此来验证结构的动力不稳定区域。这6个点的振动频率和幅值,如表1所示。当阻尼为零时,平面内点A~F的动力响应,如图9~图14所示。
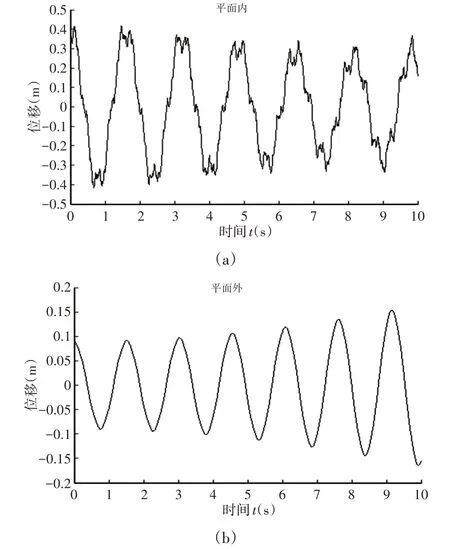
图9 A点平面内和平面外的动力响应Fig.9 Dynamic Response in and out of Plane A
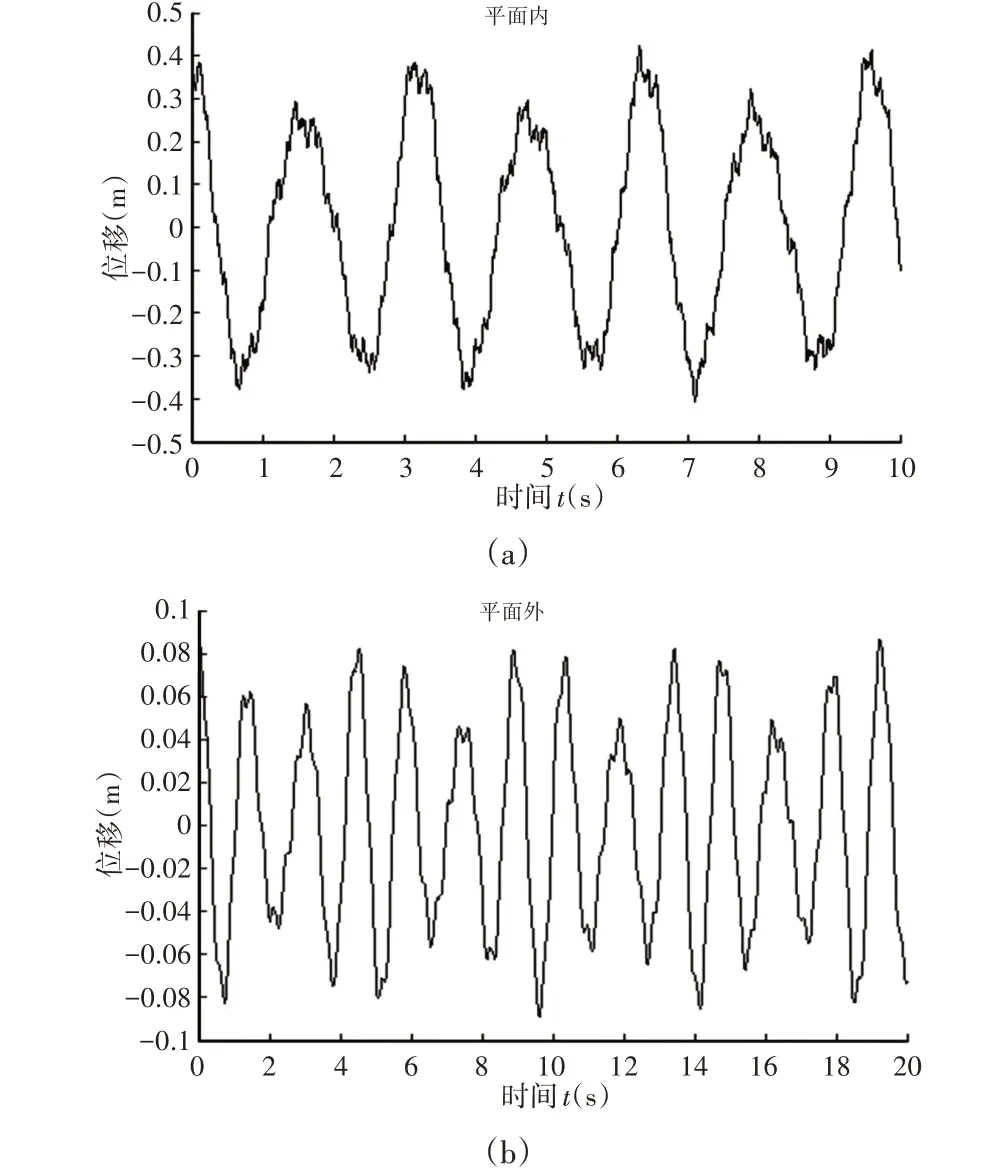
图14 F点平面内和平面外的动力响应Fig.14 Dynamic Response in and out of Plane F
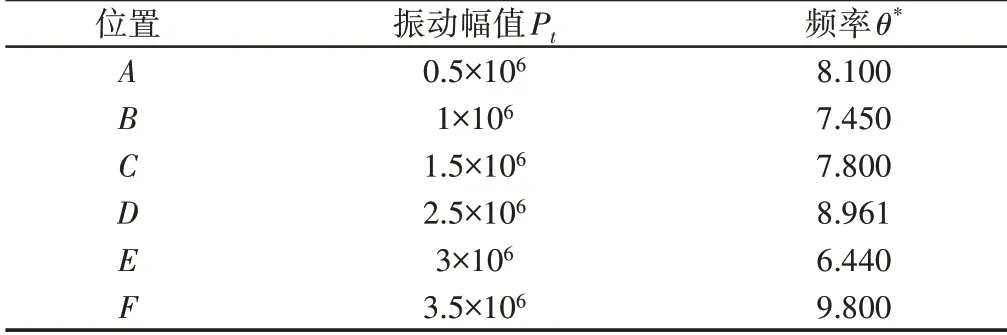
表1 A~F 6个点的振动幅值和频率Tab.1 Vibration Amplitude and Frequency of 6 Points from A to F
由图9可以看出,A点在平面内是有限位移的稳定振动,在平面外振动幅值随时间的增长逐渐增大,所以A点在平面内是稳定的,在平面外是不稳定的;由图10看出,B点在平面内是不稳定的,在平面外是由频率不同但振动幅值相差很小的两个简谐振动合成的,是稳定的;由图11看出,C点在平面内外的振动幅值均随时间成指数增长,是不稳定的;由图12看出,D点在平面内是稳定的,在平面外振幅由相对稳定逐渐减小,因此在平面外处于动力稳定和不稳定区的边界上。
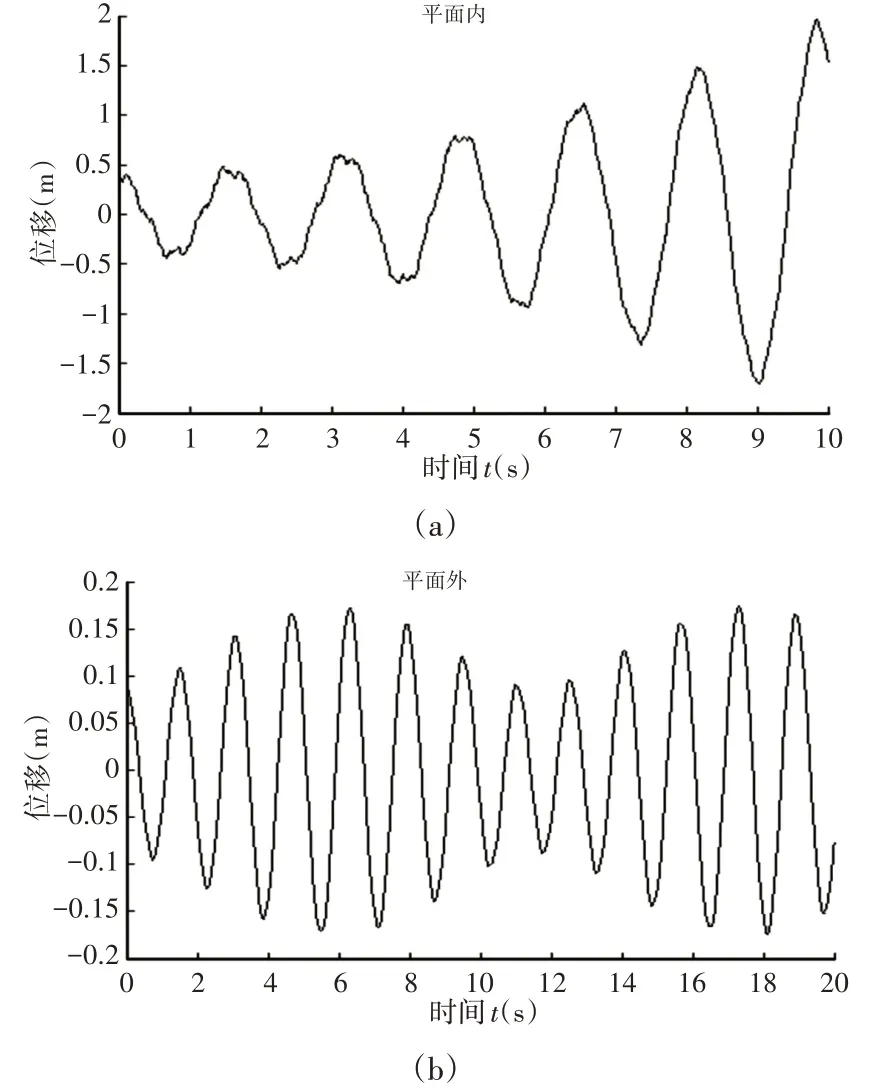
图10 B点平面内和平面外的动力响应Fig.10 Dynamic Response in and out of Plane B

图11 C点平面内和平面外的动力响应Fig.11 Dynamic Response in and out of Plane C

图12 D点平面内和平面外的动力响应Fig.12 Dynamic Response in and out of Plane D
由图13看出,E点与F点的情况正好相反,E点在平面内处于动力稳定和不稳定区边界上,在平面外是稳定的;由图14看出,在平面内外,F点均为稳定的;由上述结论可以得出,结构在平面内和平面外的稳定情况是不完全相同的,为了安全施工,应同时考虑平面内和平面外的稳定性。当存在阻尼时,动力不稳定区发生改变,如图15所示。将平面外有阻尼和无阻尼的第一动力不稳定区比较,可以看出虚线部分(阻尼为0.2)的面积小于实线部分(无阻尼)的面积,说明阻尼使动力不稳定区的面积减小即系统更稳定。

图13 E点平面内和平面外的动力响应Fig.13 Dynamic Response in and out of Plane E

图15 五节臂平面外第一动力不稳定区Fig.15 Five-Section Arm First Dynamic Instability Zone

图17 有阻尼B点动力响应Fig.17 Damped B-Point Dynamic Response
当阻尼为0.2时,对图中3个点进行动力响应分析,如图16~图18所示。对比发现,A,B两点振动幅度随时间减小最终趋于稳定,得出阻尼使A点由动力不稳定变为动力稳定状态,B点从边界变为稳定状态,C点的动力稳定性没有变化。由上述结论可以看出,阻尼的存在会改变动力不稳定区,使动力不稳定区域减小。

图16 有阻尼A点动力响应Fig.16 Damped A-Point Dynamic Response

图18 有阻尼C点动力响应Fig.18 Damped C-Point Dynamic Response
5 结论
(1)建立了计及变幅油缸作用下伸缩臂起升平面内和平面外参数振动分析模型,推导了起重机伸缩臂的参数振动方程和临界频率方程。
(2)以典型的五节起重机伸缩臂为例,绘制了伸缩臂动力稳定和不稳定区域,并取六点进行动力响应分析。分析结果表明:伸缩臂起升平面内和平面外可同时发生参数共振现象,平面外的临界频率略高于平面内的临界频率。6个特殊点的动力学响应结果表明,伸缩臂参数振动分析的结果是正确的。
(3)通过分析阻尼对伸缩臂动力稳定性的影响可知,阻尼的存在能减小动力不稳定区域,且在振动幅值Pt较小的情况下伸缩臂不会出现参数共振现象。