新工科背景下运动控制实践教学项目探索
2021-08-24陈岚萍
陈岚萍
(常州大学 信息科学与工程学院, 江苏 常州 213164)
0 引言
为适应工业4.0及中国制造2025行业发展[1~3],常州大学自动化专业主动对接长三角地区智能制造产业规划发展需要和企业技术创新要求,优化学科专业布局,发展视觉导向机器智能技术工科领域,改革常州大学自动化专业传统的工程人才培养模式,积极发展新兴工科,打造常州大学自动化专业的升级,提升人才培养质量。培养学生了解掌握以数字化为导向的创新产业升级带来的前沿机器人控制新技术,完善新工科背景下工程创新人才应具备的知识结构,提升学生综合素养和工程关联力,以适应新经济生产的要求。常大自动化专业建设视觉导向机器运动控制及虚拟仿真综合创新平台,集成了自动化专业多门核心专业知识,如自动控制原理、电机拖动、PLC技术、运动控制系统、电气控制等,因而尝试突破原有的局限于传统实验的运动控制实训,引入机器人控制先进技术,将其改革为综合性的创新工程项目教学,促使学生了解目前市场的需求以及较为前沿的智能自动化控制及相关领域的先进技术,激发学生的创新能力[4],培养学生自主设计和实施运作智能运动控制系统,提高解决实际工业问题的能力。此创新实践工程项目教学运用最新的自动化创新实验平台,学生在此平台上可全方位了解各个模块的应用,掌握如何设计及搭建实践的工业自动化系统。通过实践工程项目旨在提高学生的实践创新能力,提高学生的先进专业技术应用能力,提高工程教育认证所要求的复杂工程能力,提升学生就业竞争力[5~7]。
1 创新教学项目实施思路
目前,在长三角地区,工业机器人创业项目居多,且江苏省制定了“十三五”智能制造发展规划及2018-2020年三年行动计划[8]。常州大学自动化专业发展规划方向正是迎合地方新型经济技术的发展,将传统的运动控制方向实践类课程进行教学创新,提出了结合先进的视觉检测和机器人控制技术的视觉导向机器运动控制实践工程项目改革,作为新工科教育的探索。它依托自动化创新实验平台开展应用实践教学,改变传统的教学模式,旨在将原本分散的专业知识集合成一个新的整体,鼓励学生按照工业自动化个性设计要求,设计基于视觉的检测及运动控制创新课题,集成平台的各种典型功能模块设计实施自动化综合工程,通过典型的工业机器视觉应用系统可应用于生产线零部件组装、产品检测、生产线的监控、机器运动控制、电气设计以及产品的分类和识别等。学生可全方位了解各个模块的应用,掌握如何设计及搭建实际的工业自动化系统。该项目融合了机械、电子、自动化、计算机技术等各个领域的学科知识,可开设大量相关专业综合项目课题,提高学生的实践创新能力,从而提高学生的先进专业技术应用能力。通过此创新项目,能让学生了解目前市场的需求以及较为前沿的自动化及相关学科的工程技术,激发学生的创新能力,培养学生自主设计实施系统,提高解决实际工业问题的能力,提升学生就业竞争力[9~11]。
1.1 实践项目选题
传统的项目选题限制学生自主创新性,选题内容应结合当今前沿的新工科技术,注重实际的应用背景,以学为中心,采取小组合作项目式学习的方式践行项目教学理念,将工业生产控制中的实际问题,跨学科整合出项目。激发学生挖掘出感兴趣且新颖实用的题目,且每个小组题目由学生们自拟,教师确认其可行性,充分发挥学生的主观能动性。同时,学生会由此产生探索新知识的欲望,积极尝试项目内容的创新设计,并乐于沉浸其中,激发出更多的创造力。有效地培养学生分析、提出方案并解决工程实际问题的能力及项目开发、设计、技术改造与创新的能力。
1.2 项目可行性分析
该实践教学课程设计不同于毕业设计,综合性实践通常为3~4周,所以工作量和难度应该适当可控,在有限的时间内,选题既要让学生感兴趣,积极参与且有成就感,同时,需要通过团队合作完成,让善长硬件的同学负责项目系统的电气设计,让擅长编程的同学负责系统程序编写等,让擅长理论钻研的同学负责算法设计,让小组真正成为合作的小组,训练实践创新能力。在掌握创新平台的基本操作和设计方法后,由教师和学生根据工程问题来创设项目,解决实际问题。如设计视觉导向机器运动控制项目,包括商标条码检测,瓶盖表面瑕疵的手机检测与分拣,工件定位及抓取,机械手点胶或绘制图案、工件组装,多关节机械臂动作控制等,这些都是学生根据实际工业中所碰到的问题,创设项目,理论与实践结合。
1.3 考核评价体系
常州大学自动化专业教学创新工程项目要求在教学的过程以学生为中心,更要求教师在学生活动的过程中要适时的指导,及时的组织评价,以教师评价、自评、互评结合,及时反馈学生学习效果为导向,使创新项目按照合理有序的方向进行。在评价中渗透此教育理念,引导学生养成良好的自主学习思考习惯、发展创新思维。如教师在学生完成某个项目的学习任务后,根据项目要求提出设计要求,在规定时间内完成;学生针对自身与其他成员参与学习活动的态度、合作精神、创造精神等方面进行自评,进行自我调整,自我完善,提高学生在小组合作学习中的能力和学习效果;教师在学生完成每一个项目后,不光只关注他们的结果,更关注他们在完成过程中是否有创新,是否有自己独到的地方,及时给予肯定和支持。
2 自动化创新教学项目设计
2.1 创新实践平台设计
常州大学自动化专业要求学生通过搭建运动控制系统,配合机器视觉对机器臂进行智能导向,包括视觉检测模块、通讯模块、机械运动模块和电气控制模块。采用摄像头、光电传感器作为检测装置,来获取图像图片,通过图像处理算法测量产品尺寸、识别产品瑕疵;对于物体遮挡等复杂环境下进行图片处理时,可考虑机器学习等人工智能算法提高处理效率。运动控制部分包括PLC分拣检测产品,或运用步进伺服电机作为执行装置来调整机械手臂位置,通过控制算法实现机械臂的多轴运动控制动作,实现定位功能抓取、轨迹绘制等功能;对于运行空间存在障碍物等复杂环境下可考虑设计路径规划提高动作响应效率。
2.2 创新实践教学项目设计内容
1)视觉检测
可模拟实际工业检测中对各种目标物体的轮廓检测;目标物体的尺寸测量;表面瑕疵等缺陷检测;静止或移动目标物体的定位、颜色检测等,设计的各功能模块可切换使用,也可组合使用。通过此部分,锻炼学生掌握工业自动化生产中对于各种目标物体的自动化检测的实现方法,包括光源控制、坐标标定、图像检测、图像采集、图像处理及识别算法设计,图1所示为视觉检测及分拣控制系统。

(a)传送带产品检测
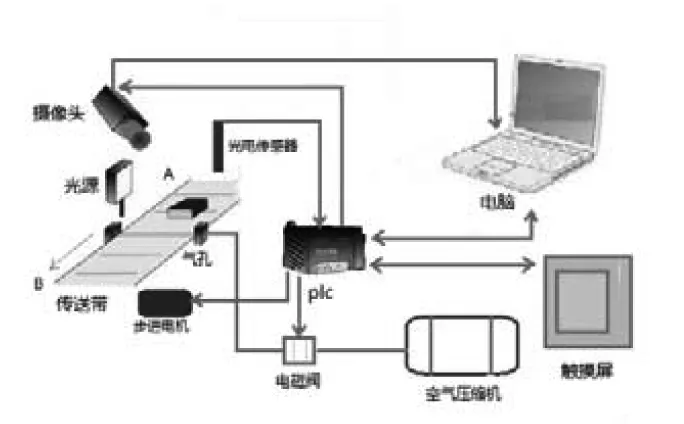
(b)分拣系统硬件结构图1 视觉检测及分拣控制系统
2)机械伺服运动控制
可实现多轴机械臂传送带或旋转盘流水线的多工位安装,搬运,点胶,锁螺丝等工业应用;模拟给料、抓取、组装产品的各模块的协同配合,完美展示此类自动组装生产应用的各个环节。通过此部分的学习,可以学习应用伺服电机控制、PLC逻辑控制、运动控制卡驱动电机控制等专业知识,包括加速度、速度的控制,多轴配合及复杂轨迹的运动控制等。
以实现六轴关节机器臂准确定位、夹取产品、运送物品等功能为项目任务,学生设计搭建一个形象逼真的3D工作场景平台如图2(a):传送带、视觉检测、工件台、末端夹抓等。学生可通过离线或在线调用虚拟对象进行生产线的工艺设计,对虚拟对象中机械手、电机、阀门等执行器的控制。通过多关节机械臂运动虚拟仿真实验操作取得实验的数据,可真实地反映机械臂工作特性和运行原理如图2(b)。
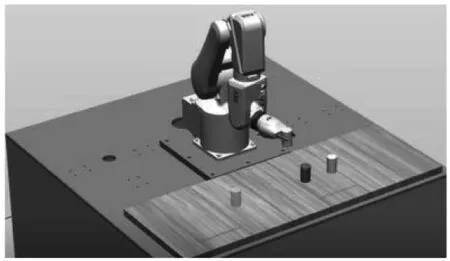
(a) 虚拟抓取动作

(b)实际抓取动作图2 六轴机器臂智能动作控制应用
3)电气控制及通讯设计
根据项目控制要求,对搭建系统使用的高、低压电器进行电气控制模块设计,完成各个电器元件的作用以及相互之间的配合使用。通讯模块可以进行工业自动化设备间的多种通讯,包括串口通讯,数字IO通讯、Ethernet通讯、CAN等协议通讯。通过此模块的学习,了解各种通讯方式的实现原理及优缺点,从而设计搭建系统的最优通讯方式。
4)软件集成
所有设计模块,包括图像采集及处理、运动控制卡驱动定位抓取或组装、质量检测及PLC分拣动作等都通过VS环境下的高级语言编程实现系统集成,如图3所示的学生设计的各类机械臂动作控制界面。

(a)三轴运动控制及PLC控制界面
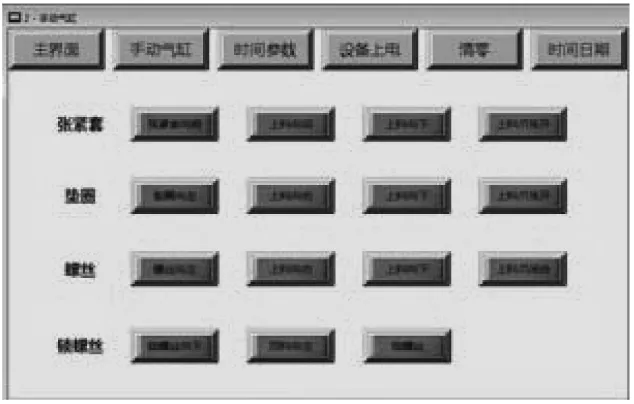
(b)触摸屏编程界面图3 系统控制界面编程
2.3 创新实践项目案例
实施实践工程项目要求学生在规定时间内完成各项任务,首先利用创新实践平台,在教师的引导下,激发学生的创造性思维,确定自拟选题。根据选题查找相关文献梳理并确定设计方案。如图4绘制钥匙,系统设计包括采集钥匙字体及轮廓图像,并进行实时处理,将图像处理结果传给三轴机械臂,控制三轴运动绘制字体及图案。此项目可训炼学生学习图像处理算法及三轴运动轨迹优化控制。

图4 钥匙图像采集及描绘系统
图5示出多工位自动检测组装系统,模拟自动生产线多工位视觉检测及工件组装,视觉检测包括相机、传送带及光电传感器,控制系统主要由转盘机构、出料机构、搬运机构、输送机构及电控装置等构成。模拟完成工件组装过程,包括各工位气缸动作配合及上下料的夹抓控制。项目设计包括工件检测及各工位控制动作以及机械部件等。进一步针对设计方案具体化,包括硬件模块的选型及电气控制,程序设计流程以及控制动作的顺序等。在上述基础上进行硬件模块的电气连接及通讯,基于PC的C#程序设计及PLC编程,并进行模块测试以评估功能实现的质量。最后进行联调测试,优化改进,实现工件全自动组装功能。
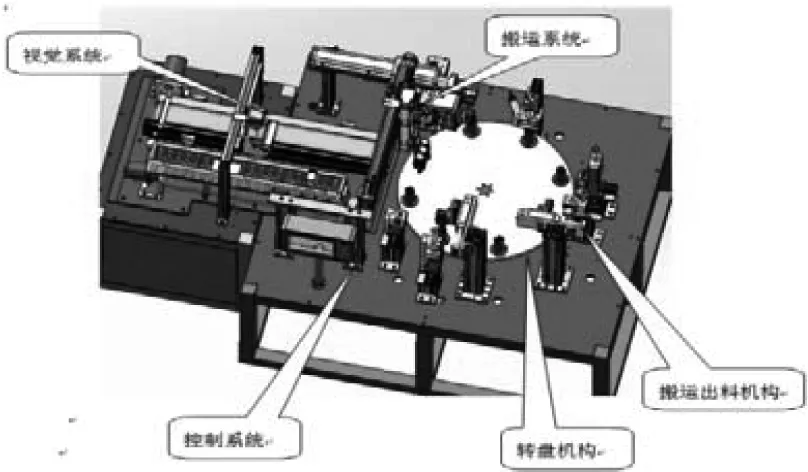
图5 多工位自动组装系统
实践工程项目可以根据学生自身能力和学习精力加以调整,如可将在线检测与智能识别及抓取动作作为一个项目,也可拆分为两个项目。鼓励学生有所创新,能够实现更具创意性的智能动作控制,如引入机器学习快速识别工件及抓取,真正将理论和实践、软硬件结合起来,切实锻炼学生的实践动手能力和解决实际问题的创新能力[12]。另外,学生可自拟项目,如图6基于视觉检测的手机智能贴膜系统的结构图,此项目后来选为高校自动化设计大赛获奖作品。
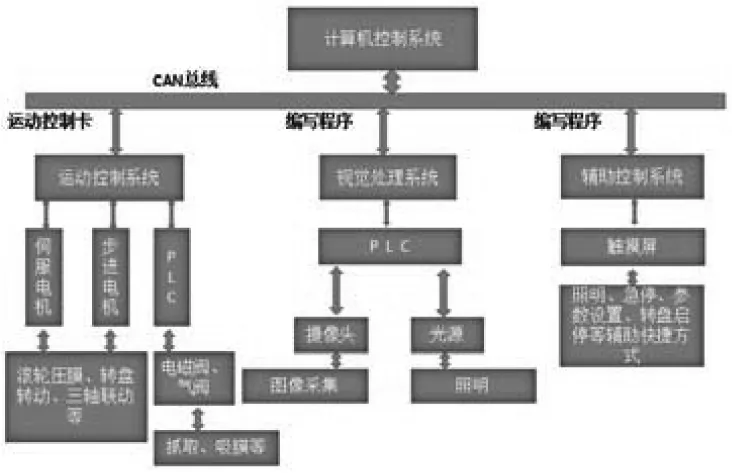
图6 手机智能贴膜系统结构
3 创新能力培养实践成果
视觉导向机器人创新能力培养平台从初始构建至今,已建设成为常州大学首批创新创业教育示范基地,在此基地平台上学生创新能力培养取得了一些成果。校级创新教育课题3项,十三五及江苏省重点教材2部,教研论文3篇。基于该平台除了常规实践活动之外,还申请参加了大学生创新创业训练计划项目,台达杯两岸高校自动化设计大赛等,其中基于项目内容申请了3项国家发明专利,具体成果见表1。另外,通过该平台培养的学生当中,在考研面试中表现优异,在就业竞争中有绝对优势,优先被机器视觉以及机器人相关的公司录用,其薪资待遇超过传统自动化科技公司30%左右,且更具发展潜力。
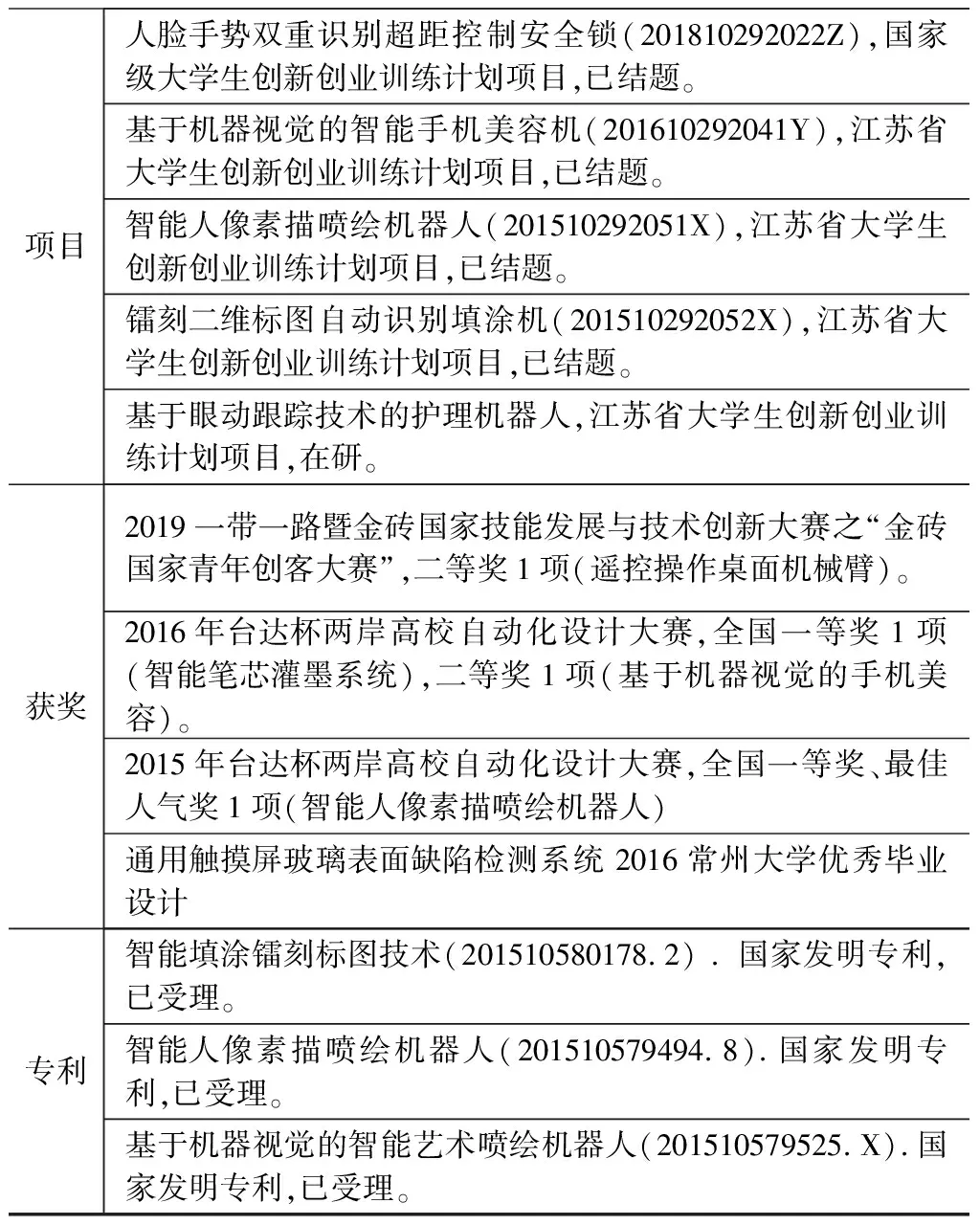
表1 实践成果
4 结语
将机器视觉与智能运动控制引入自动化实训设计,成为专业进行创新创业教育的一个重要载体,师生借此可进一步了解自动化产业发展动态,接受正规的工程培训,也可借助平台承接研发课题,提升了专业教师的业务能力及学生的实践创新能力。探索新工科背景下培养专业创新工程实践人才的新模式,实践表明,提升了专业学生的创新意识、创新思维和综合实践能力,取得了阶段性成果,通过实践工程项目训练形成完整的知识体系,真正从实际工程应用角度开展项目教学尝试。同时,也为高校教学提供一种工程创新教育与前沿技术相结合探索模式,激发了自动化专业学生综合运用所学知识,探索新领域新技术知识的学习兴趣,培养适应高校新工科建设下的创新创业人才。
