基于气隙磁场的异步电机“全矢量”分析法
2021-08-24王君艳
王君艳
(1. 上海交通大学 电力传输与功率变换控制教育部重点实验室,2. 上海交通大学 电气工程系, 上海 200240)
0 引言
目前在“电机控制技术”教学中,讲到矢量控制时,都是用很多数学推导来简化交流异步电机动态数学模型,在推导过程中有大量矢量在不同直角坐标系下的分量参与复杂运算,使学生很难把握关键点。在确定控制方案时,理论推导依然很复杂,不同方案推导关联性不强,使学生进一步研究无从下手。再者,这种矢量控制原理推导与先修课程“电机学”中讲的电机内部磁场分布缺乏关联性,导致学生学习时感到迷茫。
本文以异步电机气隙磁场为核心,根据矢量运算规律,得出三组“全矢量”形式的异步电机动态模型。“全矢量”是指:在模型推导过程中不出现电机的物理量在不同直角坐标系下的分量,物理量以完整矢量形式表达。根据这三组全矢量形式的动态模型特点,从供电侧和控制端出发简单而直接地得出四种异步电机控制策略。该方法沿袭了“电机学”教学中的电机内磁场分类及分布规律的内容[3][5],且应用了先修课程“电磁场”的磁阻、虚位移等原理分析了电机的气隙磁场和电磁转矩[2][4]。“全矢量”表达形式的动态模型具有普遍性,更易确定电机的控制方案,便于学生进一步深入研究;此方法易推广到其他电机的矢量控制,使电机控制的教学更加系统化。
1 “全矢量”形式的异步电机磁链模型
Fcosθ+Fcos(2π/3-θ)+Fcos(4π/3-θ)=1.5。下面用此规律推导“全矢量”形式的磁链模型。

图1 平面内互差2π/3的单位矢量
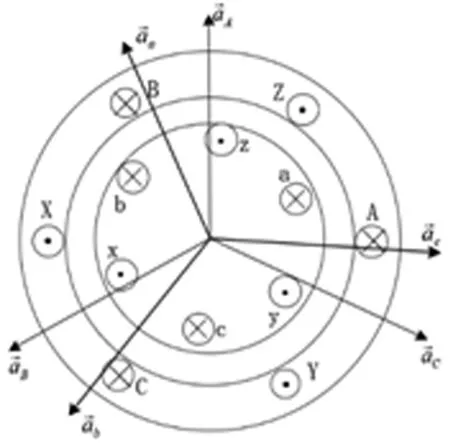
图2 异步电机定、转子的单位矢量
异步电机合成磁势:

(1)
其中:NS为定子每相匝数,Nr为转子每相匝数。以方向为正轴线的假想线圈DH如图3虚线所示,DH线圈电流方向和线圈正轴线方向遵守右手螺旋规则。假设线圈DH匝数为NS,则线圈DH中电流ID为Fm/NS,矢量。线圈DH中电流ID在气隙中产生的空间基波磁场就是电机内定、转子线圈在气隙中共同产生的空间基波磁场。
与DH线圈交链的气隙磁场形成磁路,此磁路由定子铁芯、定转子间的气隙、转子铁芯形成闭合回路,磁阻记为Rm。
根据磁路的原理[2][4],气隙中空间基波磁场在DH线圈中产生的磁通为:

(2)
其中:k1为空间基波磁通系数,小于1,为常数[3][5]。

图3 虚拟线圈DH


(3)
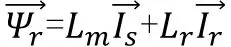
同理可得,气隙中空间基波磁场在转子中的磁链矢量:

(4)
考虑式(1),并令:Lm=1.5NSNrk1/Rm;Lms=1.5NS2k1/Rm;Lmr=1.5Nr2k1/Rm,则式(3)、(4)变为:

(5)

(6)


(7)
(8)
2 “全矢量”形式的异步电机电压模型及简化方案
2.1 “全矢量”形式的定子电压模型
定子A、B、C三相电压方程分别为:

uA、uB、uC分别为定子A、B、C相电压,RS为定子每相内阻,P为微分算子d/dt。它们分别可写为:
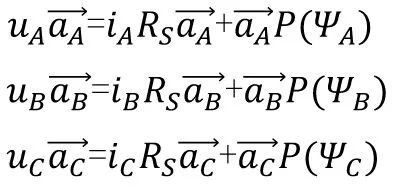



(9)
根据矢量运算规律2:

(10)

(11)
2.2 “全矢量”形式的转子电压模型
转子a、b、c三相电压方程分别为:

ua、ub、uc分别为转子a、b、c相电压,Rr为转子每相内阻,P为微分算子d/dt。它们分别可写为:
将这三个式子的等号左右两边内容分别相加,得:

(12)


(13)
(14)


(15)
此式左端用式(13)替换,经整理得:

(16)
将式(16)代入式(12)得“全矢量”形式的转子电压模型:

(17)
2.3 简化方案
分两种情况讨论“全矢量”形式电压模型的简化:

(18)
uSm、ISm分别为定子电压矢量和定子电流矢量在m轴上的分量。该式仅涉及定子磁链矢量幅值的变化。

(19)
urm、Irm分别为转子电压矢量和转子电流矢量在m轴上的分量。该式仅涉及转子磁链矢量幅值的变化。
3 “全矢量”形式的电磁转矩模型及实用形式
3.1 “全矢量”形式的电磁转矩模型
电机是通过气隙磁场传递能量的,电磁转矩与这部分磁场有关[3][5]。
前面已说明图3中虚拟线圈DH在气隙中产生的空间基波磁场就是电机内气隙中定、转子线圈共同产生的空间基波磁场。线圈DH在气隙中产生的空间基波磁场的储能Wm[2][4]:

(20)
式中:ΨmD为气隙中空间基波磁场在线圈DH中产生的磁链。
由式(2)可得:

所以:

(21)
由式(1),又因矢量模的平方等于对该矢量本身的点乘运算,即:

(22)
应用虚位移法[2][4]求电磁转矩,电磁转矩为:
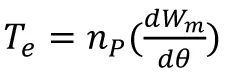
(23)

(24)
再考虑到前面已令Lm=1.5NSNrk1/Rm,对式(24)整理,有:

(25)

(26)
3.2 拓展形式


(27)


(28)

(29)
电磁转矩6种表达形式中,其中4种在下面叙述的控制中可以实现,即式(26)至式(29)。
4 以供电侧和控制端为出发点获得控制方案
4.1 定子侧供电,从定子端控制
工频电源经过变频器连接异步电机定子,通过控制变频器,改变电机定子电压矢量或电流矢量进行控制。


(30)
再由式(8)的m轴方向关系:

(31)
联立(30)、(31),消去Irm,可得:

(32)

4.2 定、转子双侧供电,从转子端控制(双馈调速系统)
双馈调速系统的定子端输入工频电压,转子端通过变频器连接工频电源,通过控制变频器,改变电机转子电流矢量进行控制。


(33)

(34)
5 结语
本文应用矢量分析方法得出“全矢量”形式异步电机的三大动态模型,又根据模型特点,以供电侧和控制端为出发点获得了控制方案。动态模型采用的是“全矢量”形式,而不是分量形式,使得控制方案引出更直接、全面,便于学生理解。在模型推导过程中强调气隙磁场在定、转子能量交换中的作用,使学生更清晰掌握电机内部物理过程,便于推广到其他类型电机的分析。
