一种应用于自动驾驶车辆的冗余低压电网系统
2021-08-24顾强源张铁欣吕洪智耿伟峰
顾强源,张铁欣,吕洪智,耿伟峰
(长城汽车股份有限公司 河北省汽车技术创新中心,河北 保定071000)
随着全球化市场整车自动化驾驶的应用,各主机厂都在投入大量研发资源,致力于开发具有自动驾驶功能的车辆。自动驾驶车辆旨在解放驾驶员的双手和双眼,提高驾驶舒适性及安全性,在系统出现失效情况时,提醒驾驶员及时接管车辆,同时,冗余系统能够自主控制车辆在出现故障后实现本车道停车或靠边停车。
1 现状
12V低压电网作为整车电器功能部件的基础供电保障,现有的电源系统架构中(图1),当低压电网供给系统出现短路、断路等失效时,车辆的电源供给被切断,自主行车控制部件将无法正常工作,存在车辆失控风险,危害司乘人身安全。
2 冗余低压电网系统
本文意在介绍一种具有冗余功能的低压供电系统方案,以解决在当前传统电网架构下,通过较低的成本、较短研发周期、较小更改量,满足具有自动驾驶功能对低压电网系统的需求。
2.1 冗余电网架构
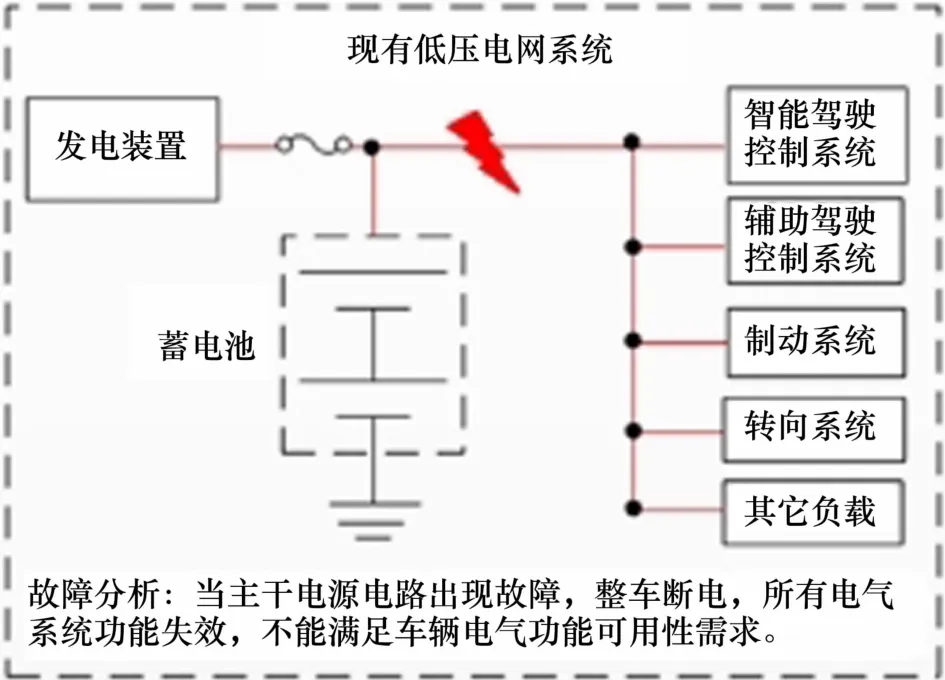
图1 现有低压电网系统
针对车辆低压供电系统,采用双电池+双隔离部件的冗余低压电网系统框图(图2)方案,通过使用备份的低压电源供给系统为车辆自动驾驶控制系统、冗余转向系统、冗余制动系统等提供电源供给,满足自动驾驶车辆控制、转向、制动、灯光功能的电源冗余需求。当车辆任意一路主干电源出现故障时,电源隔离部件能够快速响应,断开故障回路,保证系统回路中有一路正常电源供给,实现车辆自动靠边停车或本车道紧急停车。
2.2 冗余低压电网系统组成说明
1)发电装置:在车辆启动后为整车用电设备供电,同时可以为主电池、副电池充电。
2)主电池:向起动机提供瞬时大电流,保证发动机在各种情况下能够可靠起动;在车辆不启动时,为整车负载供电;在发动机怠速或停机时能在一定时间内保证用于其他重要系统所需的部分或全部电能。

图2 冗余低压电网系统框图
3)副电池:为副电池侧的用电设备供电。
4)隔离部件:连接发电装置、主电池、副电池主回路,实现电源主回路的导通与隔断。自身具备逻辑诊断及运算能力,在电网系统中出现过压、欠压故障时,开关断开,保证主电池、副电池两侧的电网系统相对独立,互不影响;在主电池侧与副电池侧各安装有一个隔离部件。
5)电池监控装置:用于检测蓄电池的电压值、健康状态,及蓄电池连接的回路是否导通,在主电池侧与副电池侧各安装有一个电池监控装置。
6)自动驾驶控制器:作为自动驾驶的主控制器,通过采集传感器信号与整车其他控制器模块交互,进行自动驾驶的逻辑判断,实现车辆的自动驾驶控制;当检测到影响自动驾驶功能实现的故障时,提示顾客接管,若驾驶员未接管,则自动控制车辆实现靠边停车或本车道紧急制动。
7)自动驾驶系统传感器:为自动驾驶控制器提供准确的车辆及路况信息的传感器、摄像头等。
8)辅助驾驶控制器:作为自动驾驶的辅助控制器,通过采集传感器信号,与整车其他控制器模块交互,当自动驾驶控制器出现异常时,车辆的辅助驾驶控制器自动控制车辆实现靠边停车或本车道紧急制动。
9)辅助驾驶系统传感器:为辅助驾驶控制器提供准确的车辆及路况信息的传感器及摄像头等。
10)制动系统:为主制动系统,包含制动系统传感器、控制器及执行器,在自动驾驶功能场景下,接收自动驾驶控制器或辅助驾驶控制器的工作指令,实现自动制动及驻车功能。
11)冗余制动系统:为辅助制动系统,包含辅助制动系统传感器、控制器及执行器,在自动驾驶功能场景下,当制动系统出现故障时,冗余制动系统接收自动驾驶控制器或辅助驾驶控制器的工作指令,实现自动制动及驻车功能。
12)转向系统:为主要转向控制系统,包含转向系统传感器、控制器及执行器。在自动驾驶功能场景下,自动驾驶控制器或辅助驾驶控制器发出转向工作指令到转向系统,实现车辆自动转向功能。
13)冗余转向系统:为辅助转向控制系统,包含备份的转向系统传感器、控制器及执行器;使用带双绕组的转向电机,连接到副电池。在自动驾驶功能场景下,自动驾驶控制器或辅助驾驶控制器发出转向工作指令时,双绕组电机参与工作实现车辆转向,当其中任意一路转向电机故障时,另一路转向控制器控制转向电机降级工作,实现车辆自动转向功能。
14)常规负载:为车辆正常工作所连接的电气负载,包括动力系统、灯光系统、舒适娱乐系统等车用电器件。
15)冗余灯光控制:为自动驾驶下的后部告警灯冗余控制系统,在自动驾驶功能场景,常规灯光系统故障后,冗余灯光控制系统接收到自动驾驶控制器的灯光工作指令,驱动告警灯点亮,提示其它交通参与者,避免危害事件的发生。
3 系统工作状态转化
1)当车辆电源模式为OFF时(图3),隔离部件一、隔离部件二都处于断开状态(图2),由主电池为辅助驾驶控制器、辅助驾驶系统传感器、制动系统、转向系统、常规负载供电;副电池为自动驾驶控制器、自动驾驶系统传感器、冗余制动系统、冗余转向系统、冗余灯光控制系统供电。
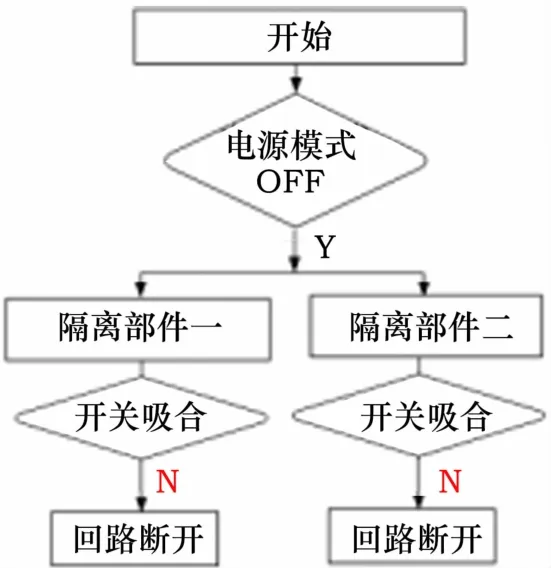
图3 电源模式OFF时,隔离部件工作流程
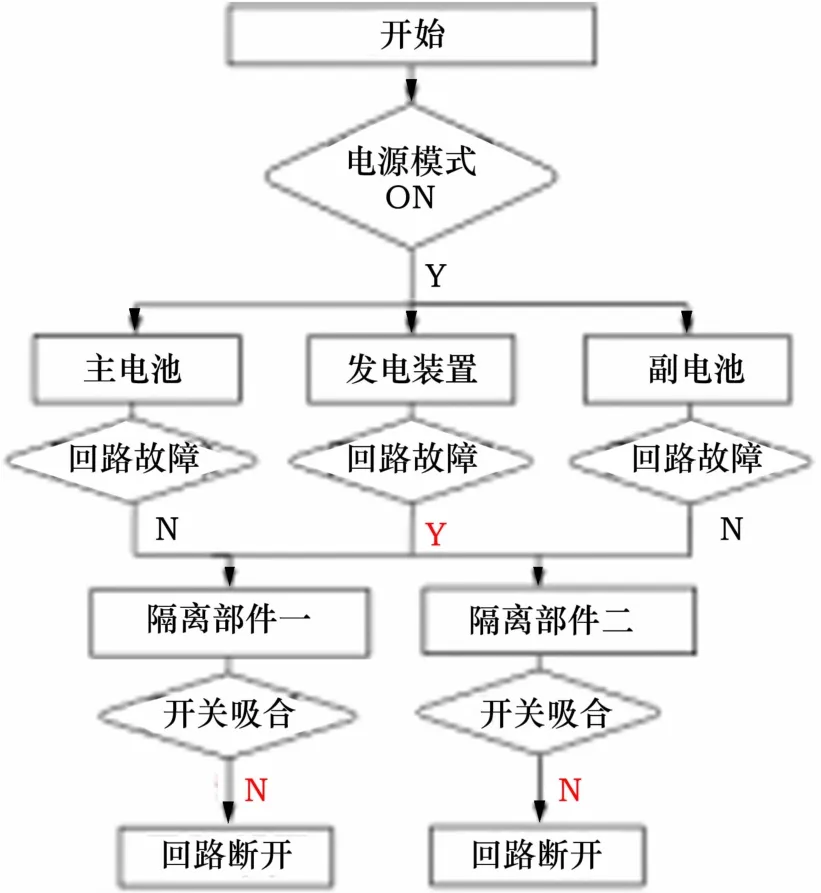
图4 电源模式ON时,隔离部件断开工作流程
2)当车辆电源模式为ON,且发电装置端电路故障时,见图4,隔离部件一、隔离部件二处于断开状态见图2,由主电池为辅助驾驶控制器、辅助驾驶系统传感器、制动系统、转向系统、常规负载供电;副电池为自动驾驶控制器、自动驾驶系统传感器、冗余制动系统、冗余转向系统、冗余灯光控制系统供电。
3)当电源模式为ON,车辆处于工作状态时(图5),隔离部件一的开关与隔离部件二的开关均处于闭合状态(图6),发电装置为辅助驾驶控制器、辅助驾驶系统传感器、制动系统、转向系统、常规负载、自动驾驶控制器、自动驾驶系统传感器、冗余制动系统、冗余转向系统、冗余灯光控制系统供电,主电池及副电池为发电装置。

图5 两隔离部件均导通工作流程
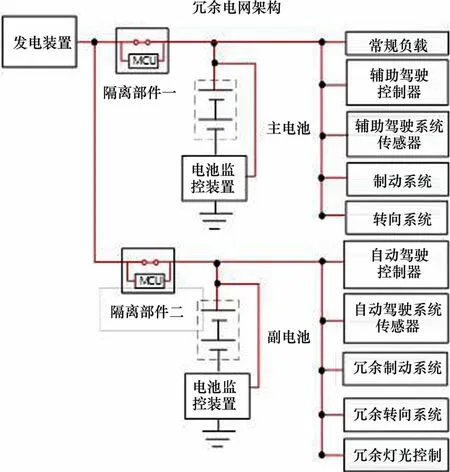
图6 电源模式ON时,隔离部件断开工作流程
4)当电源模式为ON,如隔离部件一检测到主电池侧出现超过其限值的参数(图7),则隔离部件一的开关断开,隔离部件二的开关导通,发电装置为隔离部件二连接的自动驾驶控制器、自动驾驶系统传感器、冗余制动系统、冗余转向系统、冗余灯光控制系统供电(图8)。

图7 隔离部件一开关断开,隔离部件二开关闭合工作流程
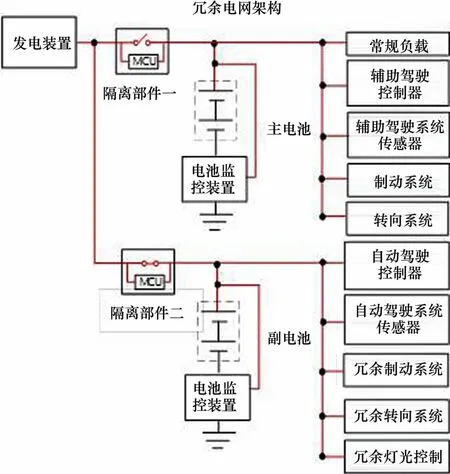
图8 隔离部件一开关断开,隔离部件二开关闭合状态
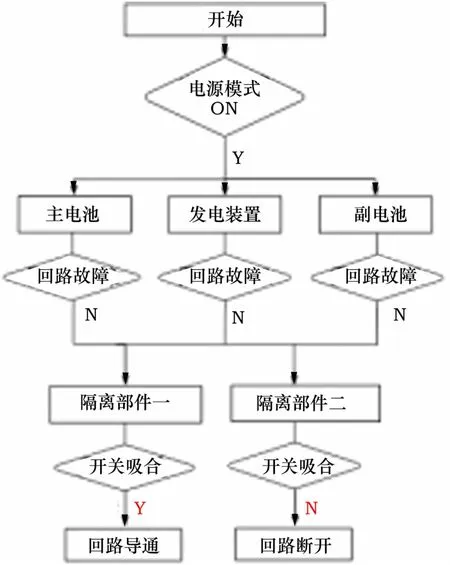
图9 隔离部件一开关闭合,隔离部件二开关断开工作流程
5)当电源模式为ON,如隔离部件二检测到副电池侧出现超过其限值的参数,流程见图9,则隔离部件二的开关断开,隔离部件一的开关导通,发电装置为隔离部件一连接的主电池、辅助驾驶控制器、辅助驾驶系统传感器、制动系统、转向系统、常规负载供电,见图10。
4 方案亮点及效果
1)此方案在现有的架构平台上增加了一个蓄电池,使用两个隔离部件,实现低压电源供给的冗余,通过两路独立的电源供给,满足自动驾驶车辆的控制、转向、制动、灯光功能的电源冗余需求。
2)本方案新增电源电路部分,可以与现有的架构共同存在,不会对现有架构造成冲突,以较低的成本、较短周期、较小更改量,应用于现有架构平台。
3)本方案新增电源电路部分,可以实现车辆冗余转向、制动、灯光的单独供电。
4)本方案中隔离部件具有电源回路的电压、电流异常检测功能,在超出其限定值后能够快速切断故障回路,保证低压电源系统的正常供给。

图10 隔离部件一开关闭合,隔离部件二开关断开
5)本方案中隔离器可以替代充电熔断丝使用,其响应时间为ms级,实现快速响应,避免控制器因电压异常波动而出现重新启动造成功能失效。
5 结束语
为了满足车辆自动驾驶功能的需求,提升车辆出现单点故障后的功能可用性,需要对车辆低压电网系统增加冗余的设计,本方案通过使用电源隔离控制器,对主电源回路诊断,当主电源回路出现故障时能够快速切断故障回路,并能持续地提供车辆制动、转向及后续安全工作所需要的电量,消除传统电源系统中电源系统失效带来的危害,保障司乘人员的安全。
