无人艇搭载多波束测深精度分析
2021-08-23刘洋赵瑞琪汪连贺
刘洋 赵瑞琪 汪连贺

摘 要:无人艇水深测量代表了海洋测量装备自动化、智能化的发展趋势,是海洋测量技术研究的热点。本文以3 m无人自主导航艇为载体搭载多波束组成无人艇系统,进行了多波束测深数据获取,对测深数据的内符合精度和外符合精度进行了简单分析,结果可满足相关规范要求。
关键词:无人艇;多波束;测深精度
1 概 述
无人艇具有吃水浅、机动性强、安全高效等特点,在军事领域以及海洋科考方面极具发展潜力,应用前景广阔。无人艇在军事领域应用历来已久,早在二战期间美军利用无人艇来远程作战,但在海洋勘探以及海洋资源开发利用方面起步较晚[1]。近几年来,国内多家科研单位和相关企业对无人艇搭载多波束测深开展了研究实验,取得了良好成果。在水深测量中船型及推进方式设计、测量设备加装、无线数据传输、测量艇吊放回收等关键技术取得了突破,无人艇搭载多波束测深技术也相应日趋成熟。在海洋测绘中,多波束是目前主要的探测手段,从测深技术的发展来看,其研究和应用已达到了较高的水平,特别是近十几年,随着电子、计算机、新材料和新工艺的广泛使用,多波束测深技术已广泛应用于海洋测绘调查项目中。
2 数据获取
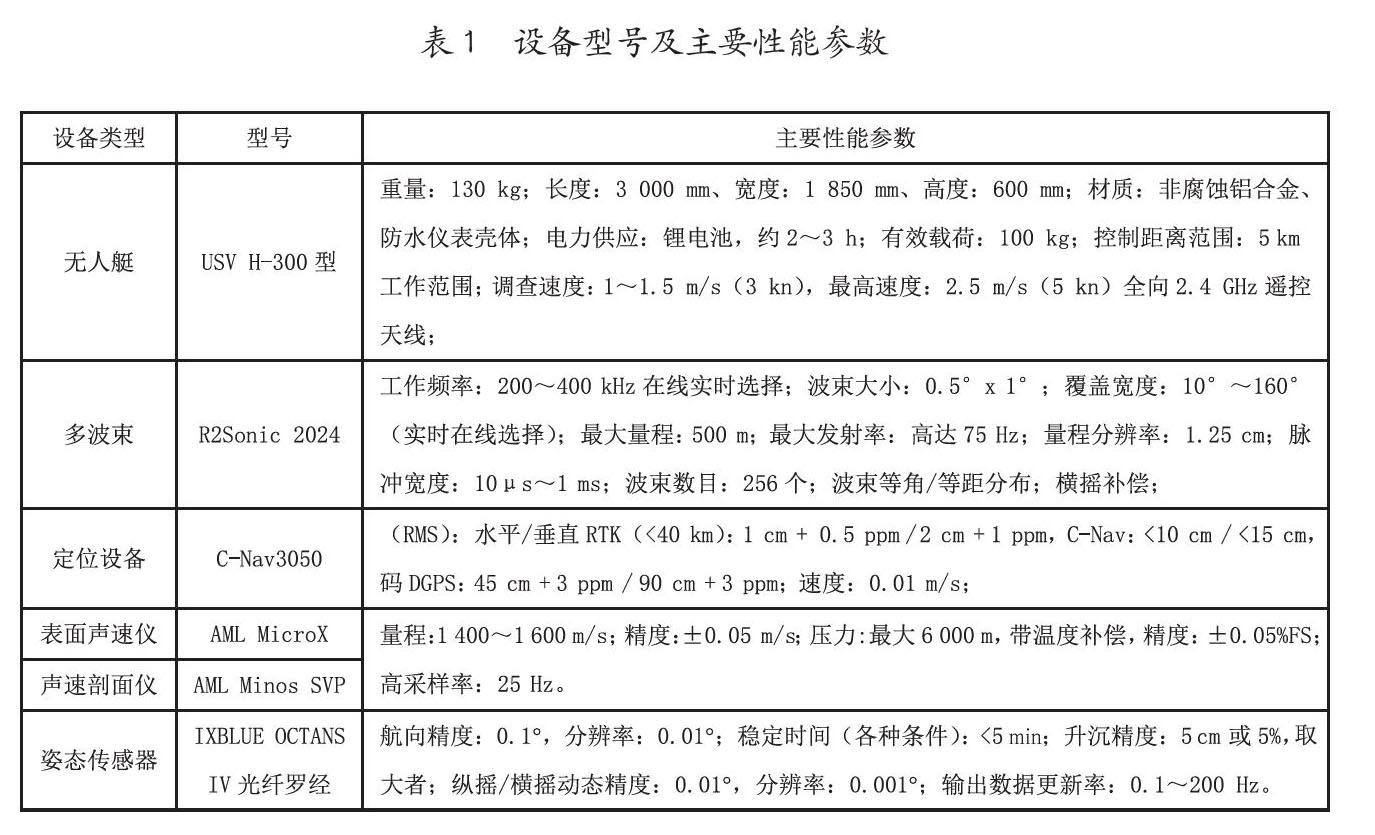
为了研究无人艇搭载多波束测深的精度情况,2017年天津海事测绘中心开展青海湖海图测绘工程期间,在青海湖进行了无人艇测试数据的获取,时间为7月4日至7月11日。青海湖具有气象因素影响小、无海洋潮汐变化等多项优势条件,便于开展无人艇搭载多波束测绘技术的现场测试、数据采集、分析等工作的进行。系统组成以3 m无人自主导航艇为载体,安装动力电池和24VDC转220VAC逆变器,搭载多波束、定位设备、姿态传感设备、电台通信设备等组成无人艇测深系统,多波束采集、导航软件使用海测大师2016,处理软件采用CARIS HIPS&SIPS8.1。各部分设备型号及主要性能参数见表1:
设备检查和安装,包括组装小艇电池等设备,独立测试电台、SONIC2024多波束、OCTANS光纤罗经,NAV-3050 GPS和AML表面声速仪等设备,各设备通信、对系统进行通信及功能性检测,之后组装系统吊放入水。系统各设备安装位置以多波束声呐头安装杆与水面交点作为参考点,定义船坐标系,船右舷方向为X轴正方向,船头方向为Y轴正方向,垂直向下为Z轴正方向,水深测量前量取各传感器相对于参考点的位置,往返各测量一次,取其平均值。各设备安装位置如图1所示, 各传感器的相对位置值见下表2:
多波束测深系统进行了换能器安装偏差标定测量,选择在码头附近进行,该处水深坡度变化明显,符合多波束校准要求。使用的C-Nav3050型星站差分定位设备可输出1PPS、ZDA信号,使多波束处理单元时间始终与GPS 的时间保持一致,实现精确的时间同步,故无需进行时间延迟测定。校准时采集多余观测数据,取其平差值,通过平坦区域同线同速反向的条带断面测量数据测试换能器的横摇(Roll)为-1.32°;通过水深变化大的区域同线同速反向的中央波束测量数据测试换能器的纵摇(Pitch)为-0.72°;通过水深变化大的区域异线(间距为覆盖宽度的2/3的两条测线)同速反向边缘测量数据测试换能器的艏摇(Yaw)为0.57°,校准效果见图2。多波束测深数据处理采用CARIS HIPS and SIPS软件进行数据转换、声速剖面改正、潮汐改正、线模式编辑、SUBSET子区编辑,最后采用CARIS GIS4.5a软件进行多波束水深数据的压缩和输出比例尺为1:500,码头前沿的数据效果见图3:
3 精度分析
从用户角度进行精度分析一般采用内符合精度和外符合精度两个指标。内符合精度通过采用同一套测深系统对某区域通过主检测线方式进行数据采集,主测线和检查线垂直布设,对重叠点水深進行比较,计算差值并统计不同偏差的水深数量和比例,确定测深系统的内符合精度指标。这种方法是多波束测深系统自身测量数据间进行的精度评估即内符合精度,可以确定除了系统偏差外的综合误差,是一种多波测量水深精度的有效评估方法[2]。内符合精度可以确定系统稳定性,分辨率等自身指标。同时由于系统最终数据精度受多种因素影响,仅考虑内符合精度是不够的,因此还需要已经通过理论和实践证实的技术方法作为基准参照,进行外符合精度评定。外符合精度通过采用不同测深系统对某区域通过主检测线方式进行数据采集,待测系统进行主测线采集,校对系统进行检查线采集或区域全覆盖采集,主测线和检查线垂直布设或全部进行全覆盖测量,对重叠点水深进行比较,计算差值确定测深系统的外符合精度指标。外符合精度可以确定测深系统准确度、精度等指标。
内符合精度在青海湖同一区域不同方向(相互垂直)布设计划测线,分别命名为测线a和测线b,测线a垂直岸线和等深线,测线b平行岸线和等深线,然后分别于不同时段(2017年7月7日、7月9日)按照两组测线对该区域进行测量。7月7日,无人艇按照测线a垂直等深线、岸线进行内符合试验,每条测线长270 m,测线间隔20 m,测量主线为25条,检查线为2条。7月9日,无人艇按照测线b平行于等深线、岸线进行内符合试验,测量主线为31条,检查线为2条。测量航迹如图4所示:两次测量的数据经CARIS软件处理后生成的水深成果面,如图5所示。
测线a所采集多波束数据的水深范围为0.97~10.78 m,水深样本数为825 241。测线b所采集多波束数据的水深范围为1.01~11.41 m,水深样本数为884 309。内符合精度的统计结果是通过Caris HIPS处理检查线和主线数据获得,多波束水深数据按照IHO S44标准[3]QC精度统计见表3。
图6从左至右依次为按照IHO S44特级、一级、二级标准处理统计结果,上面3幅图为测线a、下面3图为测线b:
由此可明显发现测线b的数据质量要优于测线a,原因为测量时风向为东南风,测线b为顺风测量,无人艇受风浪影响小,姿态较测线a更为稳定。同传统多波束测量相同,通过无人艇获取的多波束数据质量明显受风浪影响而变差。
针对无人艇测线a和测线b两次不同方向相互垂直的测线测量,比对两次测量数据结果,对角方向水深剖面对比情况良好,如图7所示(黑线为测线a红线为测线b):
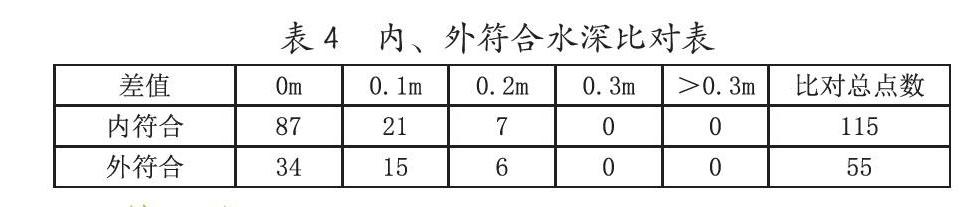
以测线b多波束数据为比对基准对测线a数据进行比对作为内符合精度;以传统测量船安装多波束方式作为校对系统, 2017年青海湖传统测量船安装多波束方式测量同一区域的测深数据作为参考值,对无人艇搭载多波束测深数据进行比较,作为外符合精度。比对半径按照图上间距1 mm设定,通过数据比对,测深重合点不符值小于0.3 m[4];比对结果内符合、外符合精度满足相关测量规范要求。内外符合比对结果见表4。
4 结 论
通过对测量结果精度分析表明,在海况较好情况下,无人艇搭载多波束可满足IHO海道测量规范(S-44)、海道测量规范、沿海港口航道测量技术要求和交通运输部多波束测深系统测量技术要求等相关测量规范要求。同时,无人艇有着浅水测量、精细测量、减少人力等优势,无人艇搭载多波束技术在海洋测绘等多种调查任务中针对浅水区域、水下地形复杂的特殊环境有广阔的应用前景。
参考文献
[1] 马向峰,韩玮,谢杨柳. 水面无人艇任务规划系统分析[J].舰船科学技术,2019.
[2] 刘兆权.多波束测深精度评估[J].中国港湾建设,2017.
[3] IHO海道测量规范(S-44),2008第5版.
[4] 沿海港口航道测量技术要求,人民交通出版社,2014.
[5] 海道测量规范GB12327-1998,中国标准出版社,1999.
作者简介:
刘洋,从事海事测绘专业领域,18920280140
资助项目:国家重点研发计划(2018YFF01013404)自组网海洋环境多参数测量仪